設定
設定
一般的な機能
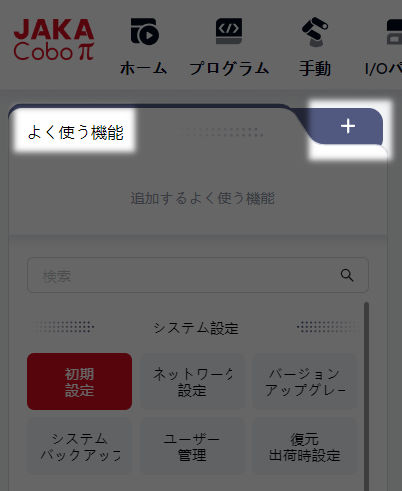
一般的な機能 インターフェースでは、ユーザーは + をクリックして最もよく使用する設定を追加できます。
具体的な手順は以下の通りです:
- 必要な設定ボックスの右上にある赤い
+をクリックします:

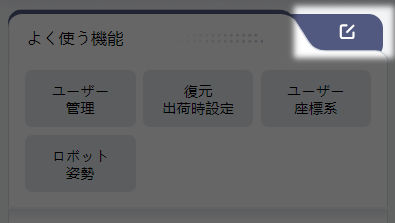
- 選択された設定ボックスが空白エリアに表示されます。
-をクリックして選択したアイテムを削除できます。右上の√をクリックして確認し、保存します。

- 保存後、ユーザーは
一般的な機能の対応する設定ボックスを直接クリックして、関連するインターフェースにジャンプして操作できます。設定は右上のアイコンをクリックして変更することもできます。
システム設定
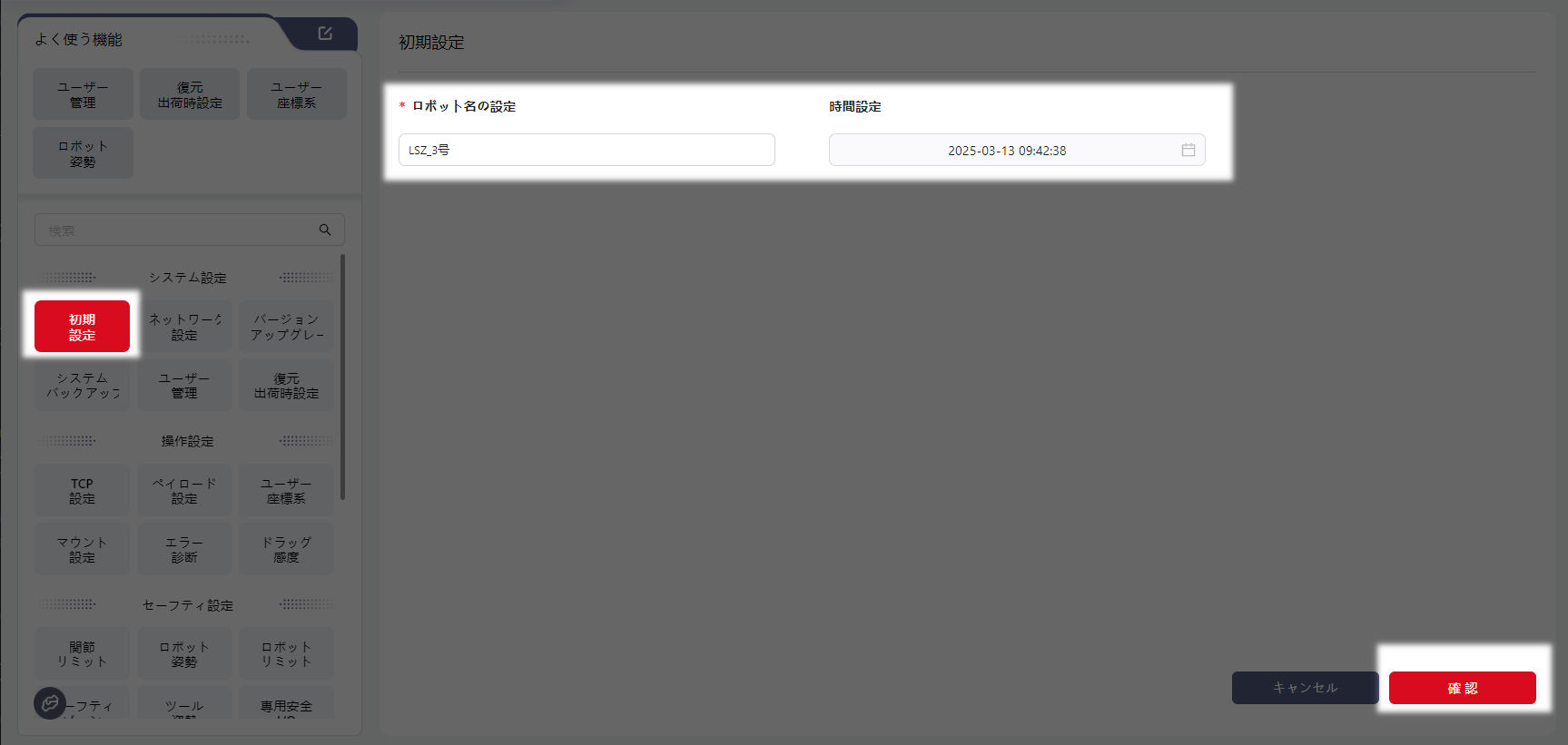
初期設定
このインターフェースでは、ロボット名 と 時刻 を設定できます。
ロボット名 に希望する名前を入力し、入力がアンダースコア以外の特殊文字を含まないことを確認してください。OK をクリックして保存し、適用します。
時刻 では、システム時刻を設定できます。OK をクリックして保存し、適用します。
以下のように、ユーザーは次のことができます:
- 入力ボックスに直接時刻を入力する;
- カレンダーから時刻を選択する;
今をクリックして現在の時刻を設定する。
ネットワーク設定
このインターフェースでは、ロボットがIPアドレスを取得する方法を選択できます。選択肢は 自動的にIPアドレスを取得 または 次のIPアドレスを使用 です。
デフォルトでは、ロボットはIPアドレスを自動的に取得するように設定されています。
ロボットに静的IPを設定する必要がある場合(つまり「次のIPアドレスを使用」)、ロボットとネットワーク越しに通信するすべてのデバイス(デバッグデバイスを含む)がロボットと同じサブネットにあることを確認してください。


注:
- 静的IPアドレスを設定する前に、ロボットが電源オフで無効になっていることを確認してください。
- 静的IPを設定すると、確認後にネットワーク設定の再起動を促すページが表示されます。接続は一時的に切断されます。
注:
CAB 2.1の場合、カスタムIP設定は下部ネットワークポートにのみ適用されます。
MiniCabの場合、カスタムIP設定はLAN2ポートにのみ適用されます。
バージョンアップ
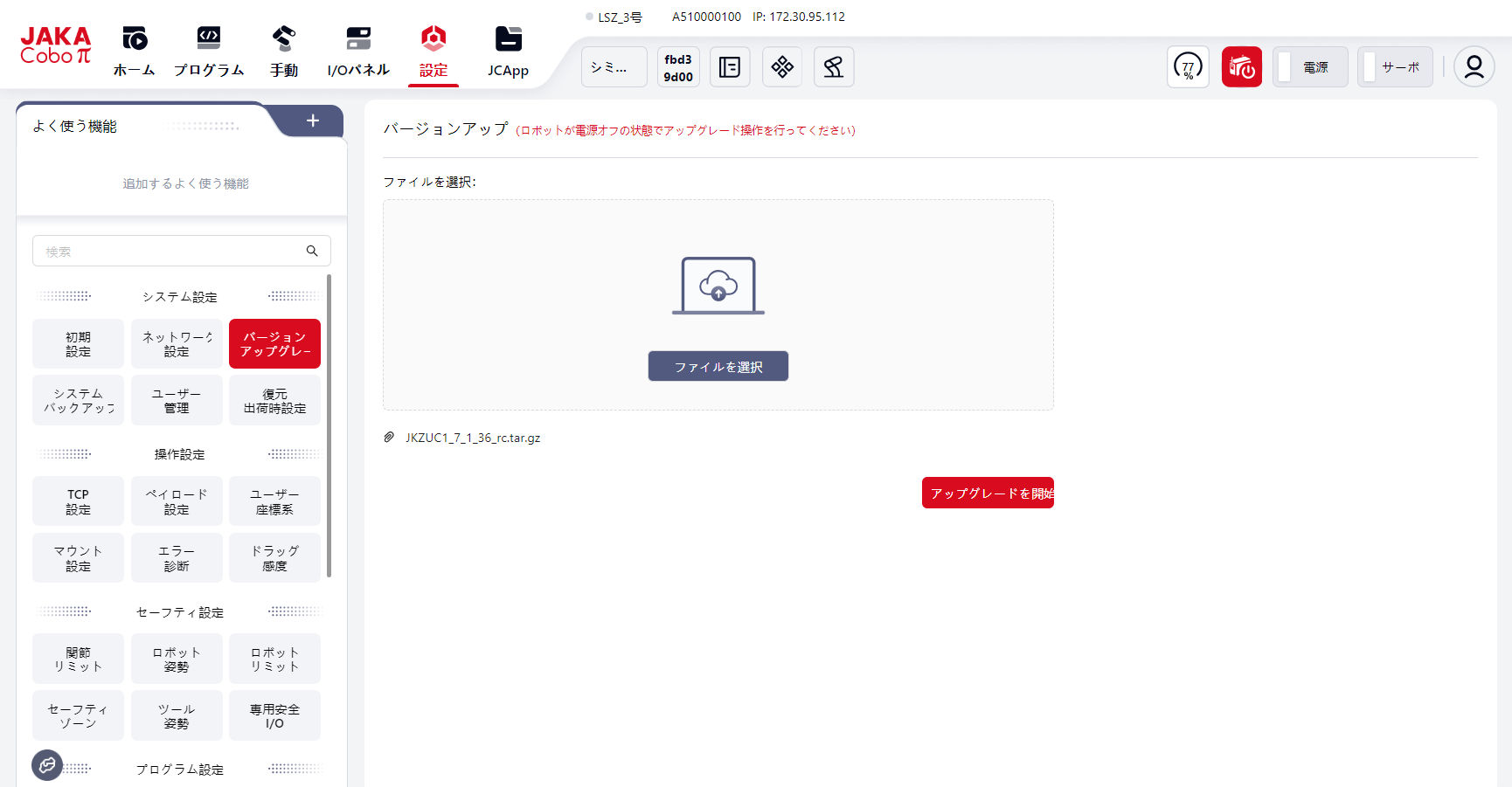
このインターフェースでは、ユーザーがロボットのコントローラ、SCB、およびサーボのバージョンをアップグレードできます。
ファイルを選択 をクリックすると、選択したファイルがインターフェースに表示されます。この時点で アップグレード が赤くなります。それをクリックしてアップグレードを適用します。
注:
正しいアップグレード順序は次の通りです:コントローラのアップグレード → アプリのアップグレード → SCBのアップグレード → サーボのアップグレード。
もし単一のコンポーネントだけをアップグレードする場合は、そのコンポーネントのアップグレードのみを実行します。
複数のコンポーネントをアップグレードする場合は、上記の順序に従って進めてください。
単一コンポーネントのアップグレードの場合、次の手順に従います:
- アップグレードパッケージをローカルデバイスにダウンロードします。
- Coboπを開き、ロボットに接続します。ロボットは電源オフで無効にしてください。
ファイルを選択をクリックして、アップグレードパッケージを選択してアップロードします。ファイルは.tar.gz拡張子を持っている必要があります(ファイル名は変更しないでください)。- コントローラとサーボのアップグレード中、コントローラが自動的に再起動します。再起動が完了すると、アップグレードは完了し、ハンドルライトが青色に変わります。
- SCBのアップグレード時、進捗ウィンドウが表示されます。アップグレードが完了すると、コントローラがシャットダウンします。制御キャビネットを再起動するには、ハンドルスイッチボタンを3〜5秒間長押ししてください。
アップグレードパッケージにコントローラ、SCB、およびサーボが含まれている場合は、ワンクリックアップグレード手順に従います:
- アップグレードパッケージをローカルデバイスにダウンロードします;
- Coboπを開き、ロボットに接続します。ロボットは電源オフで無効の状態であることを確認します;
ファイルを選択をクリックして、ワンクリックアップグレードパッケージを選択してアップロードします。ファイルは.jk拡張子を持っています(ファイル名は変更しないでください)。
→ アップグレード内容を再確認し、アップグレードが成功すると、システムは自動的に再起動し、再起動したインターフェースで再ログインできます。
::: 警告: アップグレード前に、SCBとPSCBのバージョンを確認してください。もしSCBのバージョンが02_50未満、またはPSCBのバージョンが02_00未満の場合、アップグレードは行わないでください。JAKA技術サポートチームに連絡して、支援を受けてください。 :::
システムバックアップ

システムバックアップには、設定ファイルのインポート/エクスポート と 自動バックアップ が含まれます。
設定ファイルのインポート/エクスポート
設定ファイルには、ロボットの操作中にユーザーが変更したパラメータが保存されています。これにはコントローラの設定、I/O名、動的I/O、システム変数、安全ゾーンなどが含まれます。
- エクスポート:エクスポートする設定ファイルの種類を選択し、「エクスポートファイル」をクリックして保存場所を選択し、「OK」をクリックしてエクスポートを完了します。
- インポート:「インポートファイル」をクリックしてファイルパスを選択し、「OK」をクリックしてインポートを完了します。インポート後は、制御キャビネットを手動で再起動して変更を適用します。
注:
設定ファイルをインポートする際、コントローラのバージョンが一致していることを確認してください。異なるバージョンのファイルをインポートすると、コントローラにエラーが発生する可能性があります。
自動バックアップ
有効にすると、Coboπは設定変更後に指定したインターバルでプログラムを自動的にバックアップします。
バックアップファイル名は次の形式になります:プログラム名.システム時刻。
バックアップファイルを表示するには、プログラムインターフェースに移動し、ファイル - バックアップ をクリックします。
バックアップファイルは直接実行できません。バックアップファイルを新しいファイルとして保存してから実行する必要があります。
::: タブ @tab バージョン172 バージョン172では、設定ファイルをインポート後、ポップアップウィンドウで再起動が必要かどうかをユーザーに尋ねるメッセージが表示されます。
確認をクリックすると、システムが自動的に再起動します。 :::
ユーザー管理

このインターフェースでは、管理者が異なるユーザーレベルのログインパスワードを変更できます。
デフォルトのパスワードは以下の通りです:
- 技術者:0000
- オペレーター:0
- 管理者:jakazuadmin
初回使用時にパスワードを変更することをお勧めします。
新しいパスワードは安全に保管してください。パスワードを忘れた場合は、JAKAの技術サポートに連絡してリセットを依頼してください。
工厂设置恢复
この機能はバージョン172で利用可能です。
注:
この操作を実行する前に、ロボットが電源オフで無効になっていることを確認してください。

このインターフェースでは、ユーザーが特定のオプションを選択して工場出荷時設定に復元することができます。すべて選択 ボタンをクリックすると、リスト内のすべてのオプションがリセットされます。
希望するオプションを選択後、確認 をクリックすると、ポップアップウィンドウが表示されます:
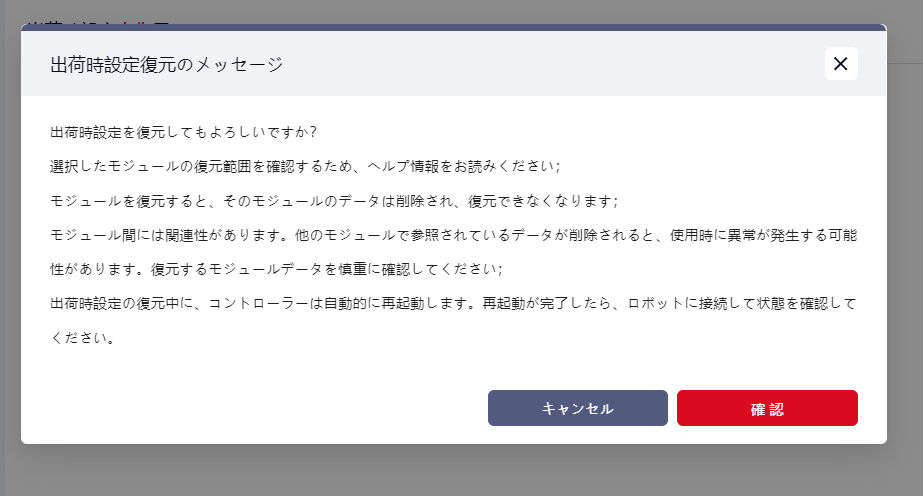
再度 確認 をクリックし、管理者パスワードを入力します:
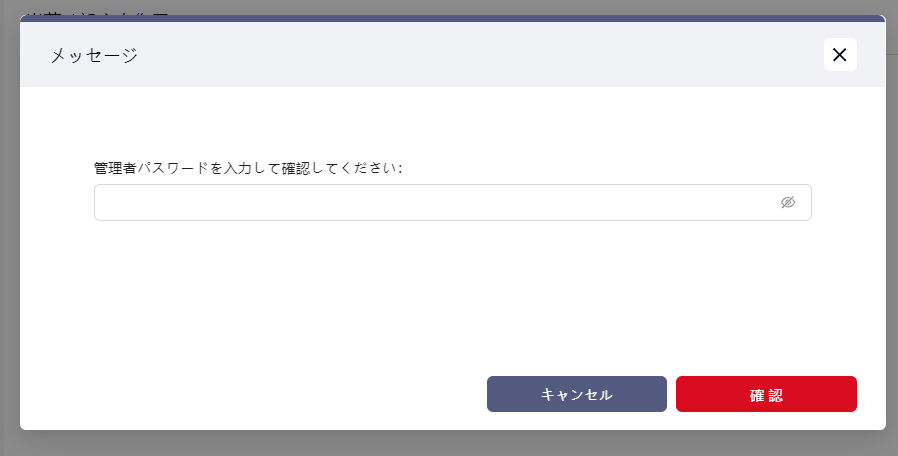
パスワードを入力後、確認 をクリックします。ページに復元進行中のプロンプトが表示されます。
その後、ロボットが再起動し、再起動後に復元が成功したことが確認できます。
詳細な説明は以下の通りです:
システムパラメータ
- システム設定:
- ロボット名:
JKROBOTに復元。 - ネットワーク設定:IPアドレスを自動取得にリセット。
- アドオンプログラム:
System_Addonを除くすべてのアドオンを削除。 - ユーザー管理:デフォルトのユーザー名とパスワードにリセット。
- ロボット名:
- 操作設定:
- TCP設定:TCP名とパラメータをデフォルト値にリセット。
- ペイロード設定:手動入力モードデータを0にリセット;自動検出結果をクリア。
- ユーザー座標設定:ユーザー座標名とパラメータをデフォルト値にリセット。
- インストール設定:設定されたインストール角度をクリア。
- 安全設定:
- ジョイント制限:現在のロボットモデルのデフォルトジョイント制限に復元。
- ロボット姿勢:工場姿勢、開放姿勢、初期姿勢、初期姿勢誤差、運動速度を含むすべての構成されたロボット姿勢をリセット。
- ロボット制限:ロボット関連のすべての制限をデフォルト値にリセット。
- 安全ゾーン:すべての安全ゾーン設定をクリア。
- ツール姿勢:すべてのツール姿勢設定をクリア。
- 専用安全I/O:すべての安全I/O設定をクリア。
- ハードウェアと通信:
- Modbusパラメータ設定:Modbus TCP/IPをポート6502にリセット。
- エンドセンサー:エンドセンサーに関連するすべての設定をデフォルト値にリセット。
- PROFINET設定:PROFINETを無効にし、デバイスパラメータをクリア。
- EtherNet/IP設定:EtherNet/IPを無効にし、デバイスパラメータをクリア。
- 補助ハードウェア設定:すべての関連設定をデフォルト値にリセット。
ユーザーデータ
- プログラム:
- すべてのプログラムを削除。
- すべてのプログラムのウェイポイントデータを削除。
- I/O:
- 設定されたすべての機能I/Oをクリア。
- すべての機能I/O名をクリア。
- 機能I/Oに関連するパラメータをクリア。
- スピード倍率の設定をクリア。
- 拡張I/Oの設定をクリア。
- 追加されたすべての拡張I/Oを削除。
- 自動再接続の設定をデフォルト値にリセット。
- システム変数:すべてのシステム変数を削除。
- 軌跡記録:すべての軌跡記録ファイルを削除。
- デフォルトプログラム:
デフォルトプログラムインターフェースのすべての設定を復元。
システム記録
- ログ:
ログインターフェース内のすべてのコンテンツをクリア。 - 障害診断:すべての診断フォルダとファイルを削除。
操作設定
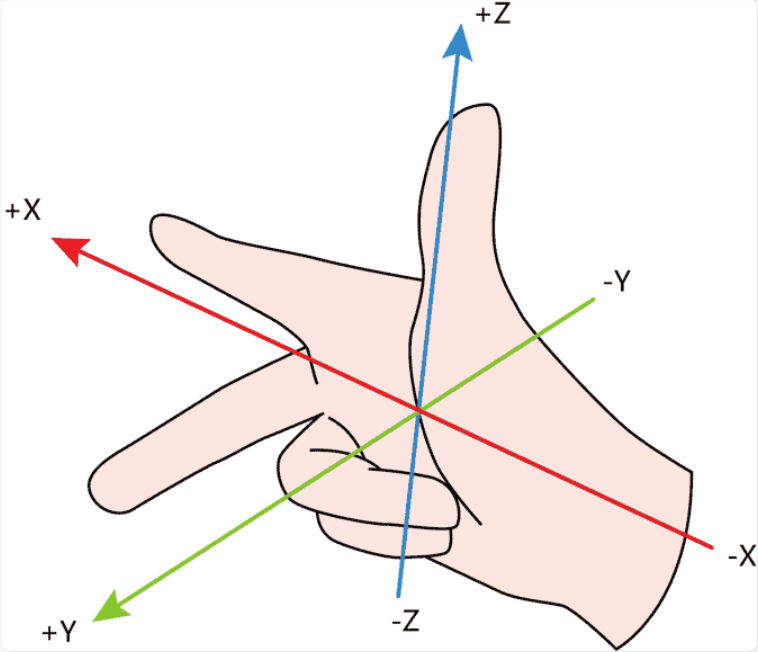
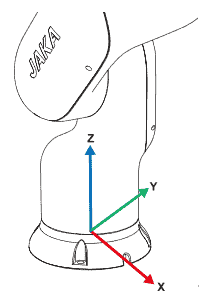
ロボットを使用する際には、ワールド座標系、フランジ座標系、ツール座標系、ユーザー座標系など、複数の座標系を選択できます。
ワールド座標系とフランジ座標系はデフォルトの座標系であり、ツール座標系とユーザー座標系はユーザー定義の座標系です。
これらのすべての座標系は右手系に従います。以下の図に示します:
TCP設定
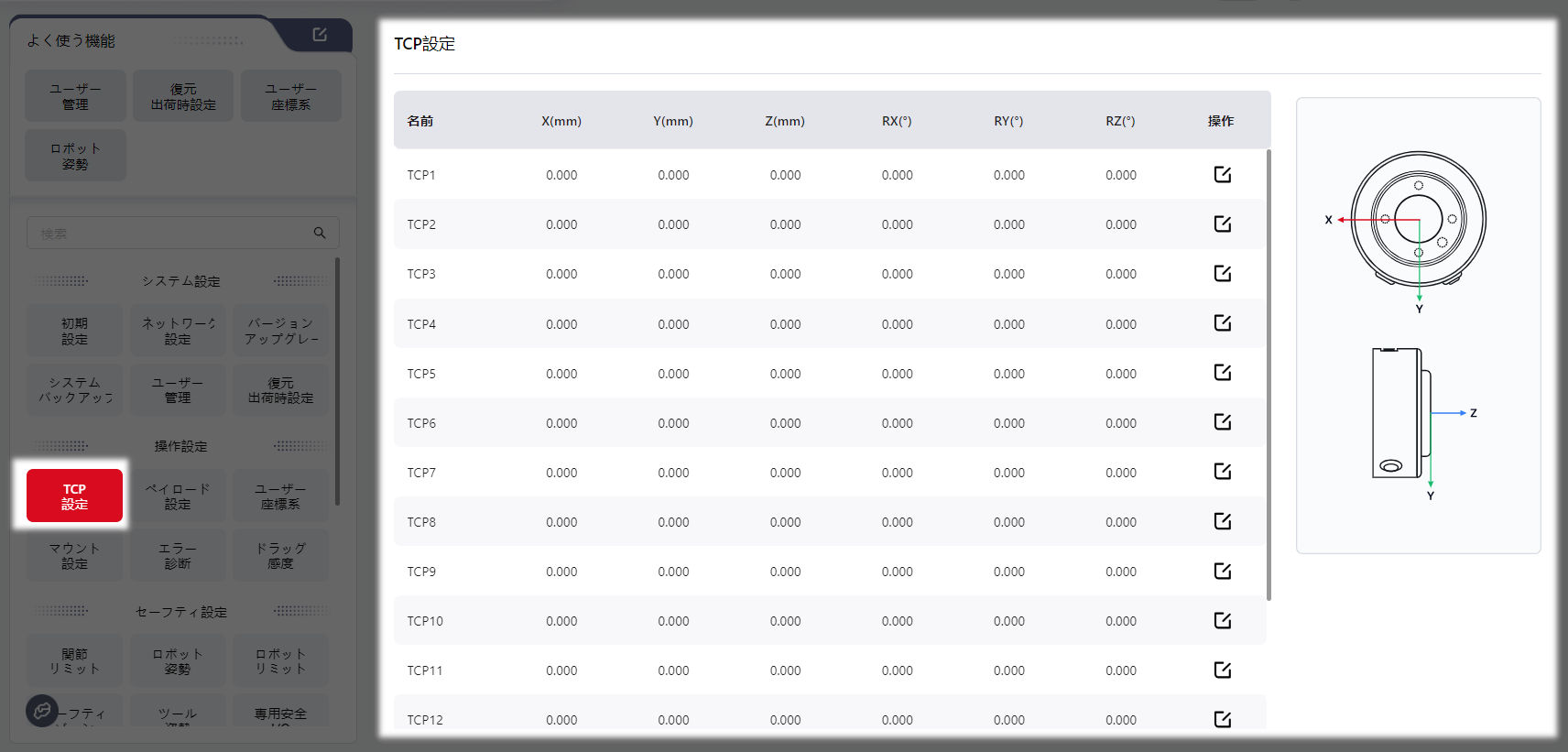
ツール座標系は、ツールセンターポイント(TCP)を原点とする座標系であり、ロボットのツールの位置を示します。手動でキャリブレーションが必要です。JAKA Coboπでは、TCPはツール座標系を指します。ロボットのツールが交換されると、ツール座標系を再キャリブレーションする必要があります。
ロボットのエンド位置は、現在のユーザー座標系におけるロボットのエンドセンターポイントの直交座標を指します。ロボットのエンド方向は、ツール座標系が現在のユーザー座標系における方向を示し、ロール・ピッチ・ヨー(RPY)方式で表現され、インターフェースに RX RY RZ として表示されます。
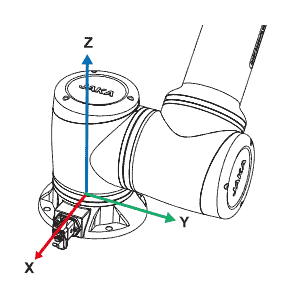
フランジ座標系はロボットのデフォルトのツール座標系であり、ロボットのフランジ中心を原点として、フランジ面は正のZ軸方向を指し、フランジ中心とTIOの接続は負のY軸方向を向き、正のX軸方向は右手の法則によって決まります。
以下の図に示します:
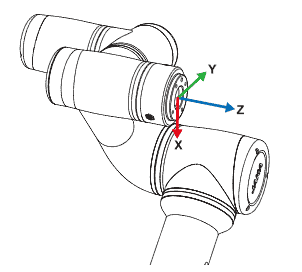
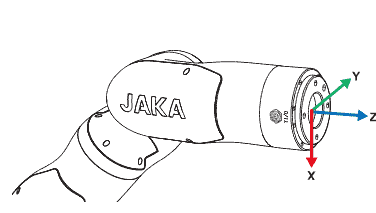
フランジ座標系のパラメータは変更できないため、精度が要求されるアプリケーションでは、TCPは通常ロボットのエンドエフェクタの先端(例えば、グリッパーや吸盤の中心)に設定されます。
JAKA Coboπは、最大15の編集可能なTCPパラメータの設定をサポートしています。
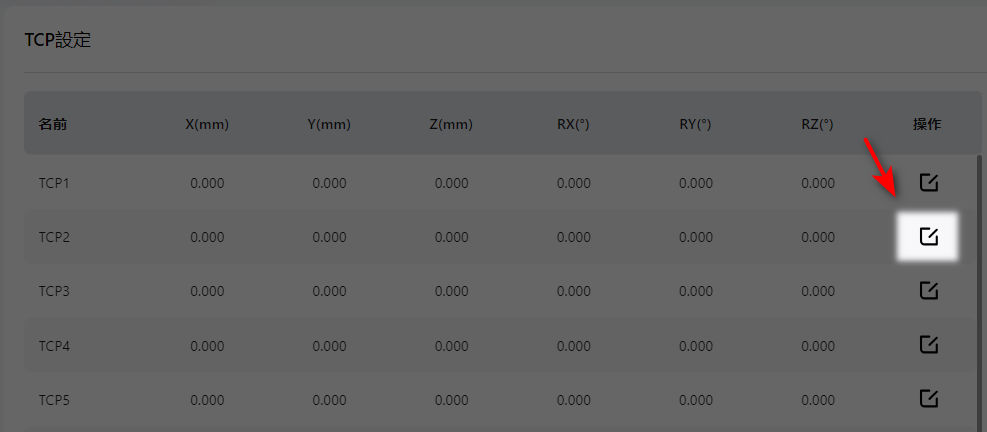
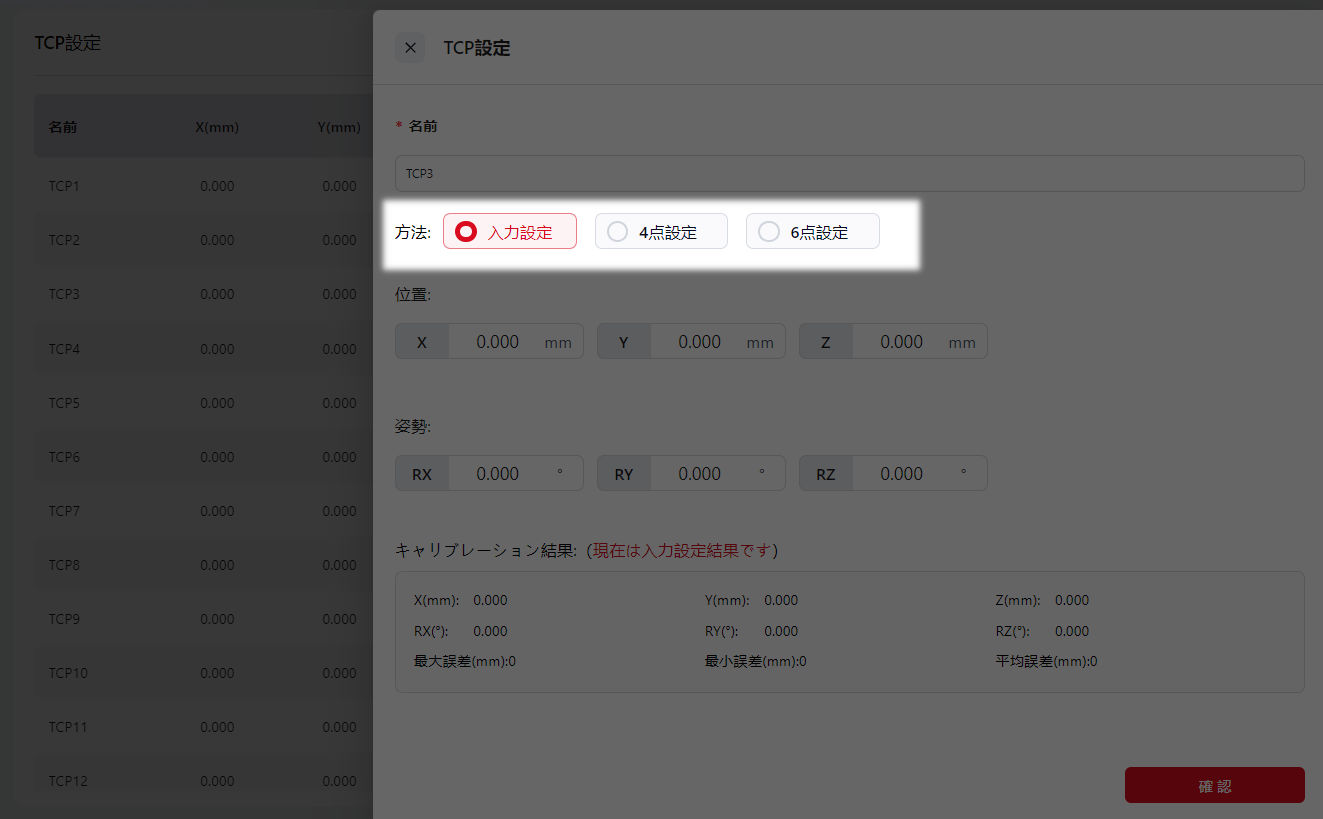
ユーザーは、必要に応じてTCPを設定するための3つの異なる方法を選択できます。
入力設定
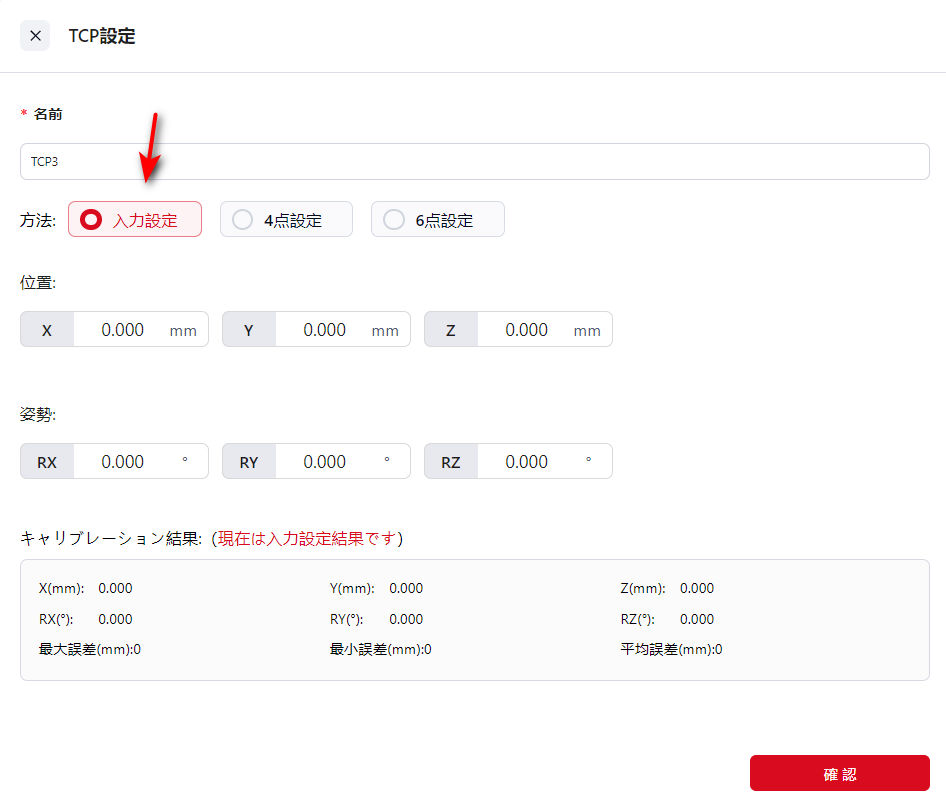
対応するフィールドにデータを直接入力して設定を行います。キャリブレーション後、結果と誤差が表示されます。
四点キャリブレーション
空間内の固定点を特定し、ロボットを操作してその点にTCPを持って行き、四つの異なる方向からこの点に設定します。この方法では、システムがツール座標系がフランジ座標系に対する所望の姿勢オフセットを計算します。
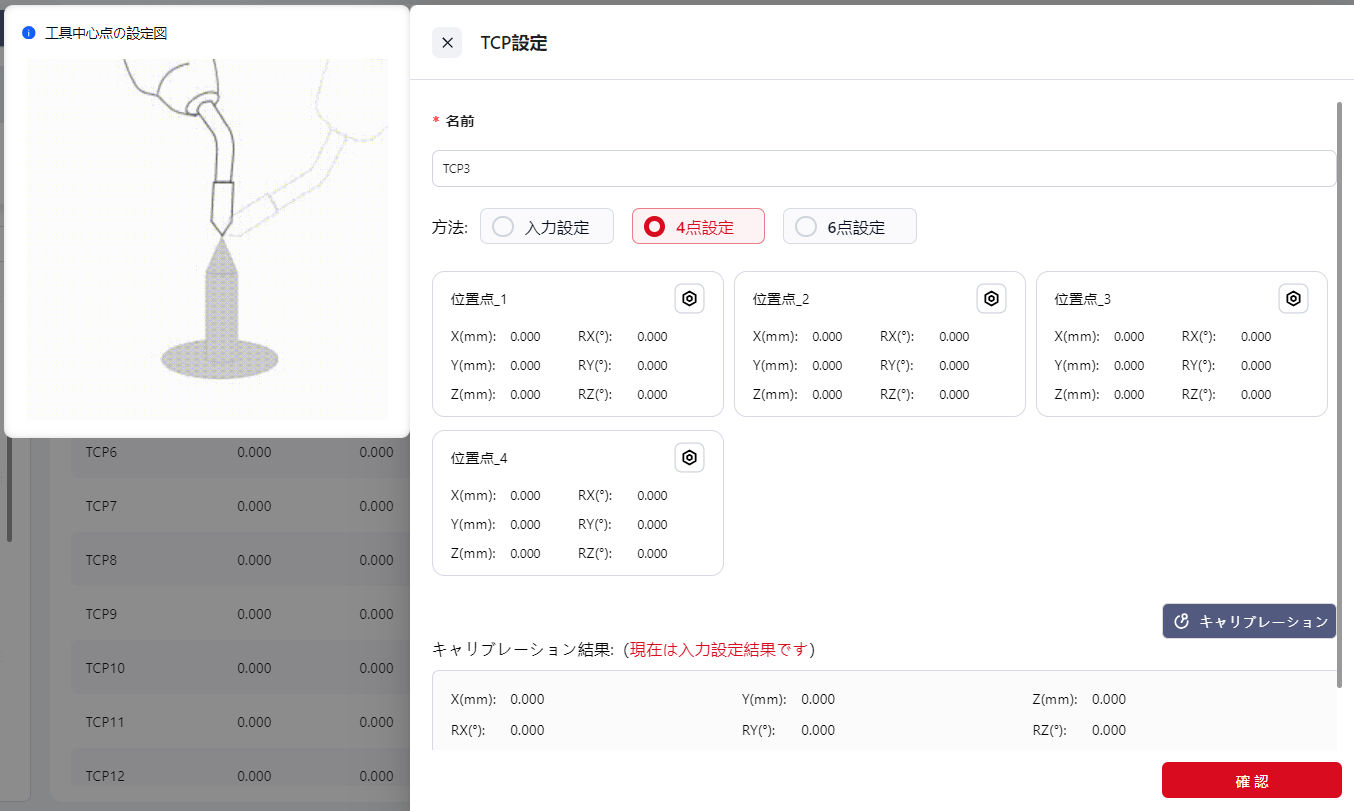
位置点 ボックス内の任意の位置をクリックすると、ページが自動的に手動操作ページにリダイレクトされます。ユーザーはロボットを操作して四つの位置点を設定するか、ロボットのティーチング方法を使って直接設定します。
手順は以下の通りです:
- ロボットの可動範囲内に固定参照点を見つけます。例えば、コーンの先端など。
Point_1をクリックし、ロボットを操作してアクチュエータの先端を参照点に持っていき、確認をクリックします。Point_2をクリックし、ロボットを操作してアクチュエータの先端をPoint_1と異なるジョイント角度で参照点に持っていき、確認をクリックします。Point_3をクリックし、ロボットを操作してアクチュエータの先端をPoint_1とPoint_2から異なるジョイント角度で参照点に持っていき、確認をクリックします。Point_4をクリックし、ロボットを操作してアクチュエータの先端をPoint_1, Point_2, Point_3から異なるジョイント角度で参照点に持っていき、確認をクリックします。キャリブレーションをクリックして、ツール座標系のパラメータを取得します。- キャリブレーション後、結果と誤差が表示されます。
六点キャリブレーション
四点キャリブレーションを基に、さらに二つの位置点を指定してTCP座標軸方向を決定し、TCPの位置と姿勢パラメータを自動的に計算します。この方法は、ツールの軸がロボットのフランジと垂直または平行でない場合に使用されます。

手順は以下の通りです:
- ロボットの可動範囲内に固定参照点を見つけます。例えば、コーンの先端など。
Point_1をクリックし、ロボットを操作してアクチュエータの先端を参照点に持っていき、確認をクリックします。Point_2をクリックし、ロボットを操作してアクチュエータの先端をPoint_1から異なる角度で参照点に持っていき、確認をクリックします。Point_3をクリックし、ロボットを操作してアクチュエータの先端をPoint_1とPoint_2から異なる角度で参照点に持っていき、確認をクリックします。Point_4をクリックし、ロボットを操作してアクチュエータの先端をPoint_1, Point_2, Point_3から異なる角度で参照点に持っていき、確認をクリックします。Point_4はツール座標系の原点として機能します。Point_5をクリックし、Point_4の姿勢を変更せずに、ツール座標系のZ軸正方向に沿って新しい位置に移動してPoint_5を設定し、確認をクリックします。Point_6をクリックし、Point_5の姿勢を変更せずに、ツール座標系のXOY平面内で新しい位置に移動してPoint_6を設定し、確認をクリックします。確認をクリックして、ツール座標系のパラメータを取得します。Point_4とPoint_5を繋ぐ線がツール座標系のZ軸の正方向を決定します。- キャリブレーション後、結果と誤差が表示されます。
ペイロード設定
ペイロードは、ロボットのエンドに取り付けられたすべてのオブジェクトの質量と重心を指します。
ペイロードを適切に設定することで、コントローラはロボットの実際の動作条件を正確に計算できます。
ペイロードが正しく設定されると、ロボットのエンドフランジは、ドラッグモードでロボットのエンドボタンを押した後、動かず安定します。
現在、Coboπは 手動入力モード を介してのみペイロード設定をサポートしています。
画像に示すように、ユーザーは質量と重心を含む正確な負荷情報を対応するフィールドに入力し、確認をクリックして設定を完了します。
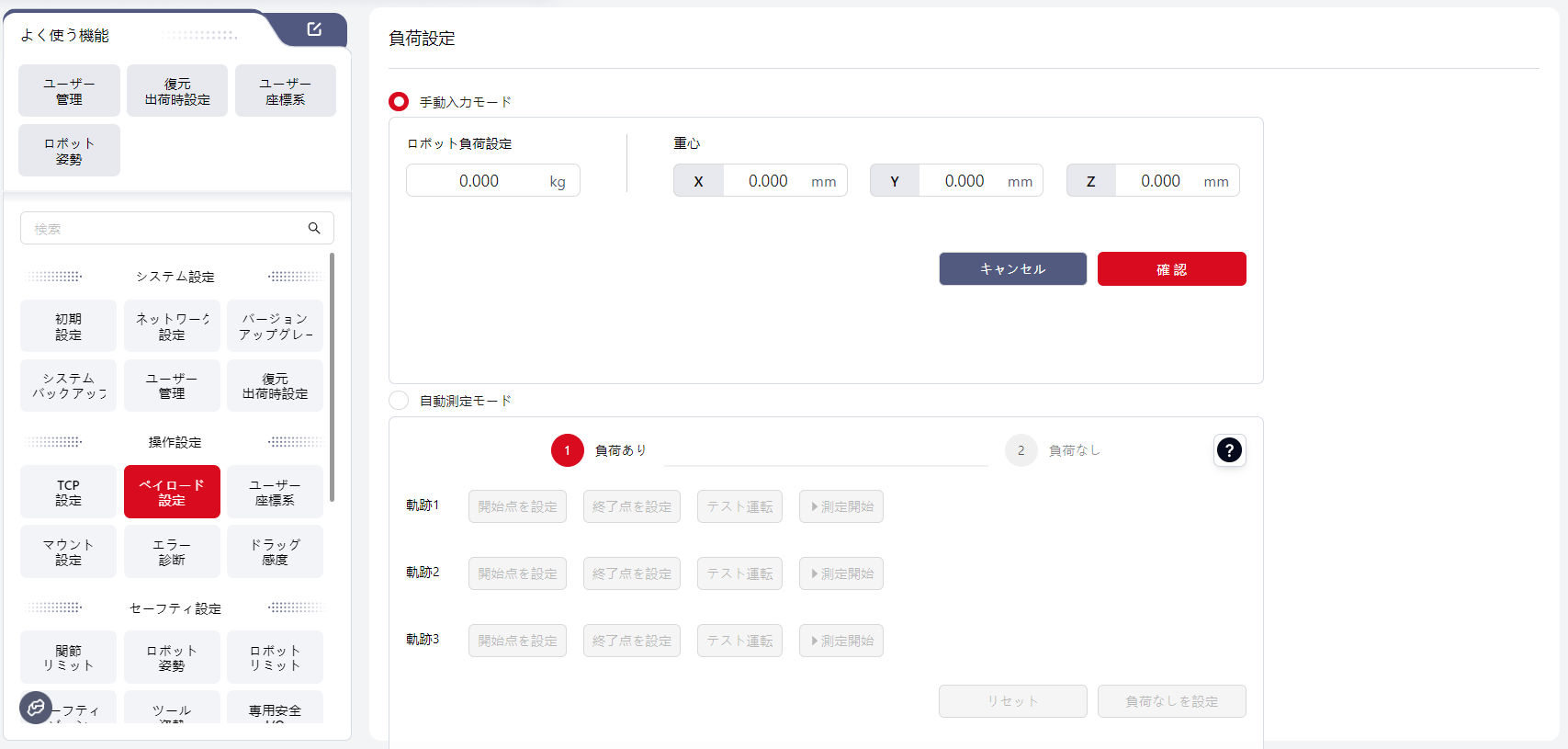
::: 警告 注: 負荷が正しく設定されていることを確認してください。実際のペイロードが設定されたペイロードと異なる場合、誤検知が発生したり、ロボットの動きが停止したり、ロボットが損傷する恐れがあります。 :::
注:
重心はロボットのエンドフランジ中心に対する相対的な位置です。重心のX、Y、Z座標はフランジ座標系での空間的な値です。精度を高めるために3D設計ソフトウェアを使用して計算することをお勧めします。
自動認識モード

自動認識モードは、ロボットの軸3、4、5、6を使用して、負荷を載せた状態と載せていない状態でロボットを動かし、エンドエフェクタの質量と重心を計算します。プロセスには以下の手順が含まれます:
最初に、ロボットは載荷状態と非載荷状態で同じ軌道を実行する必要があります。まず
With Loadから始めます。負荷を取り付け、ロボットを位置(0°、90°、0°、0°、180°、0°)に配置し、垂直方向に設定します。この位置は認識プロセスの基準姿勢となります。
軌跡1の設定:開始点を設定をクリックして、手動操作インターフェースに入り、開始点を設定します。- 軌跡1では、次の条件を満たす必要があります:ジョイント2は90°、ジョイント3は0°、ジョイント4は(-60°、60°)の範囲、ジョイント5は180°、ジョイント6はジョイント4の角度に一致します。条件を満たしていない場合、Coboπのポップアップが修正を促します。
- 設定後、
確認をクリックします。
終了点を設定をクリックして手動操作し、終了点を設定します。- 終了点は開始点と一致する必要がありますが、ジョイント4の角度が開始点と終了点の間で少なくとも10°異なる必要があります。
- 設定後、
確認をクリックします。
軌跡1のテスト:開始点を設定を長押しして初期位置に戻ります。トライアルランを長押ししてロボットを開始点から終了点に移動させ、軌跡上に干渉がないことを確認します。
軌跡1の認識:認識開始をクリックします。- 軌跡の完了後、このボタンは「認識完了」と表示されます。
軌跡2の設定:開始点を設定をクリックして手動操作に入り、開始点を設定します。- 軌跡2の初期点は次の条件を満たす必要があります:ジョイント2は90°、ジョイント3は0°、ジョイント4は(-60°、60°)の範囲、ジョイント5は180°、ジョイント6はジョイント4の角度より90°大きいです。条件が満たされない場合、Coboπが修正を促します。
- 設定後、
確認をクリックします。
終了点を設定をクリックして手動操作し、終了点を設定します。- 終了点は開始点と一致する必要がありますが、ジョイント4の角度が開始点と終了点の間で少なくとも10°異なる必要があります。
- 設定後、
確認をクリックします。
軌跡2のテスト:開始点を設定を長押しして初期位置に戻ります。トライアルランを長押ししてロボットを開始点から終了点に移動させ、軌跡上に干渉がないことを確認します。
軌跡2の認識:認識開始をクリックします。- 軌跡の完了後、このボタンは「認識完了」と表示されます。
軌跡3の設定:開始点を設定をクリックして手動操作に入り、開始点を設定します。- 軌跡3の初期点は次の条件を満たす必要があります:ジョイント2は90°、ジョイント3は0°、ジョイント4は0°、ジョイント5は170°から180°の範囲です。条件が満たされない場合、Coboπが修正を促します。
- 設定後、
確認をクリックします。
終了点を設定をクリックして手動操作に入り、終了点を設定します。- 終了点は次の条件を満たす必要があります:ジョイント2は90°、ジョイント3は0°、ジョイント4は0°、ジョイント5は180°から190°の範囲で、開始時のジョイント5の角度との合計が360°になるようにします。ジョイント6は初期角度に一致する必要があります。
- 設定後、
確認をクリックします。
軌跡3のテスト:開始点を設定を長押しして初期位置に戻ります。トライアルランを長押ししてロボットを開始点から終了点に移動させ、軌跡上に干渉がないことを確認します。
軌跡3の認識:認識開始をクリックします。- 軌跡の完了後、このボタンは「認識完了」と表示されます。
すべての軌跡の認識が完了したことを確認した後、負荷を取り外し、
Without Loadに切り替えます。軌跡を再設定する必要はなく、非載荷モードで各軌跡を認識します。載荷および非載荷の両方の認識が完了すると、ポップアップウィンドウに認識結果が表示されます。
ユーザー座標系
ユーザー座標系は、作業物に基づいて設定され、値を直接入力するか、ポイントを教示することでロボットが教示されたポイントに基づいて座標系を計算します。
作業物の位置が変わった場合、ユーザー座標系の再キャリブレーションが必要です。
ワールド座標系はデフォルトのユーザー座標系であり、そのパラメータは変更できません。ワールド座標系の原点はロボットのベースの中心にあり、ロボットが標準的な向きのとき、ベースからロボット本体に向かって垂直方向が正のZ軸、ベース中心と負荷線インターフェースを繋ぐ線が正のX軸、正のY軸は右手の法則によって決まります。
以下の図に示します:
JAKA Coboπは最大15の編集可能なユーザー座標系の設定をサポートしています。
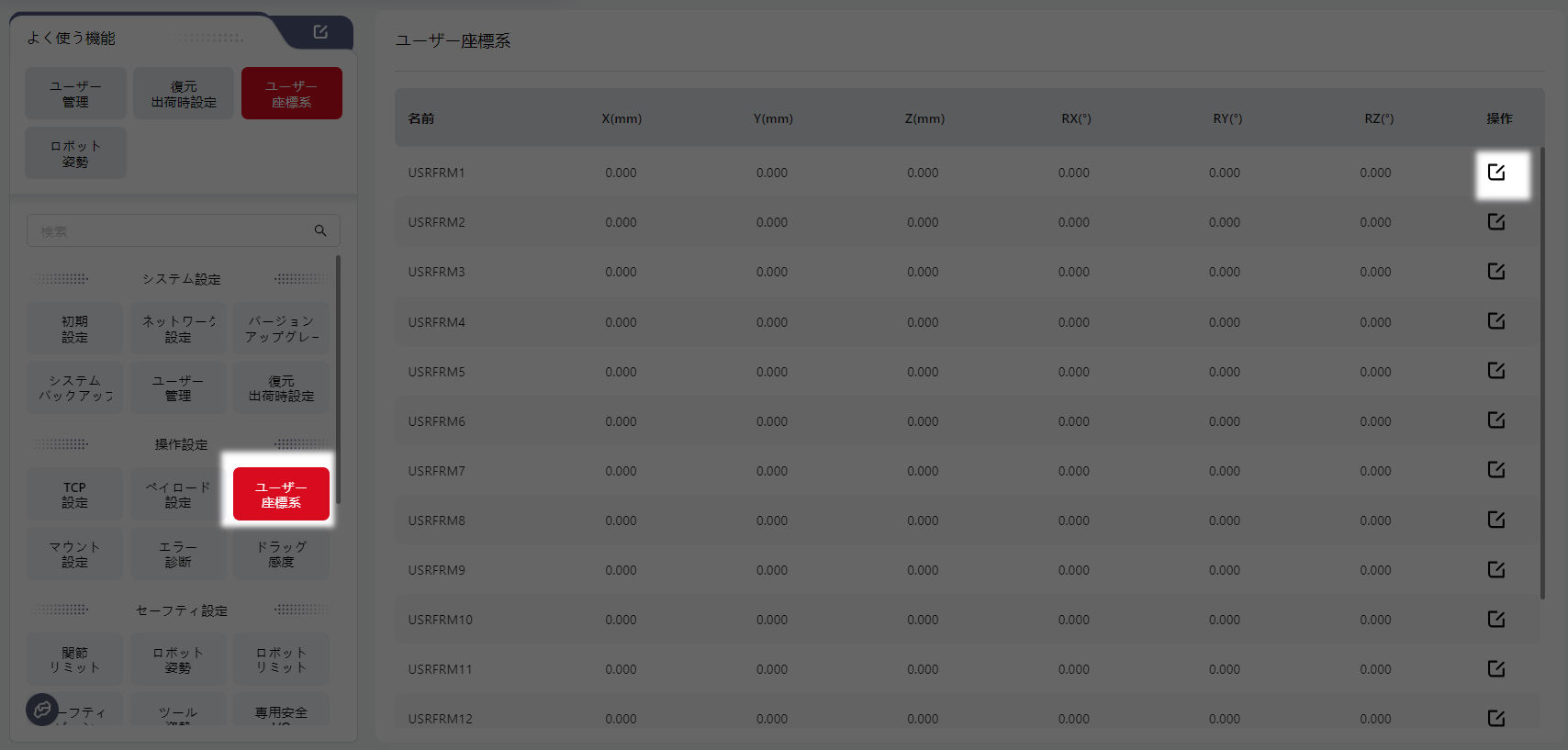
ユーザーは以下の2つの方法のいずれかを選択できます。
入力設定
ユーザーは対応するフィールドにデータを入力し、確認 をクリックしてユーザー座標系のパラメータ編集を完了します。キャリブレーション結果が表示されます。

三点キャリブレーション
ユーザーが3つの位置点を教示すると、ロボットはX、Y、Z方向におけるユーザー座標系のパラメータを自動的に計算します。
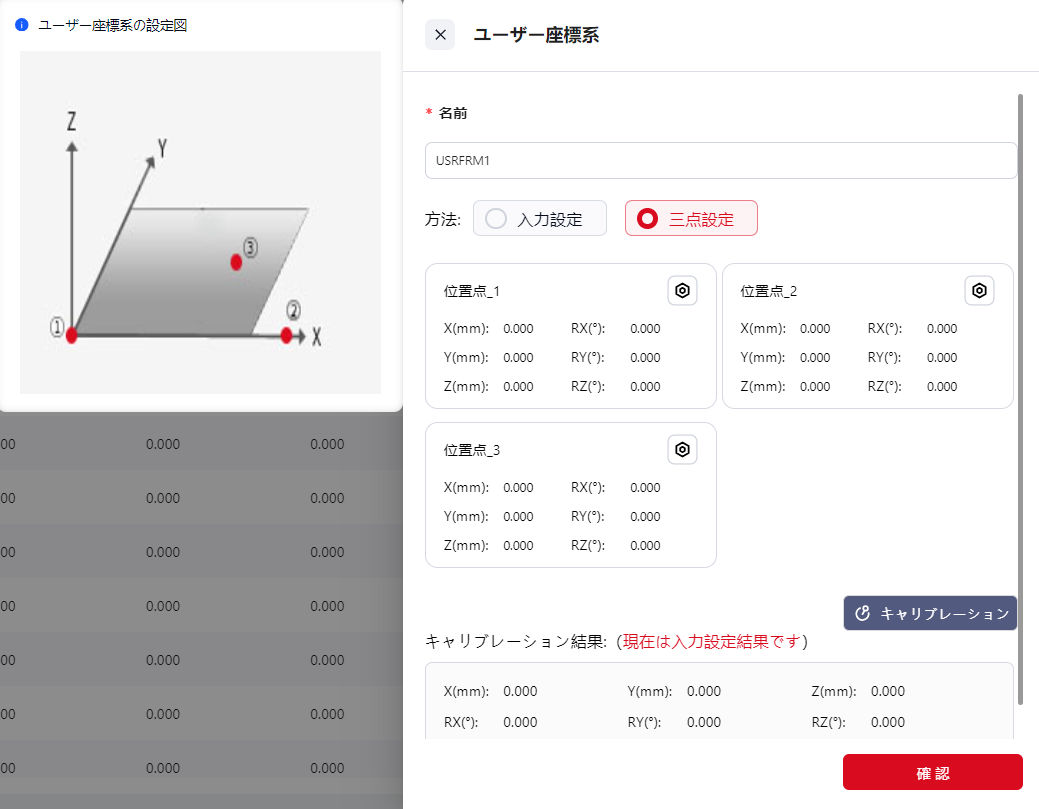
位置点 ボックス内の任意の位置をクリックすると、ページが自動的に手動操作ページにリダイレクトされます。ユーザーはロボットを操作して3つの位置点を設定するか、ロボットのティーチング方法を使って直接設定します。
Point_1 これはユーザー座標系の原点を設定します。
Point_2 これはユーザー座標系の正のX軸方向の任意の点を設定します。
Point_3 これはユーザー座標系のXOY平面の第一象限内の任意の点を設定します。
三点設定中に選択した座標系は一貫性を保つ必要があります。
点の設定が完了すると、キャリブレーション結果が表示されます。
取り付け設定
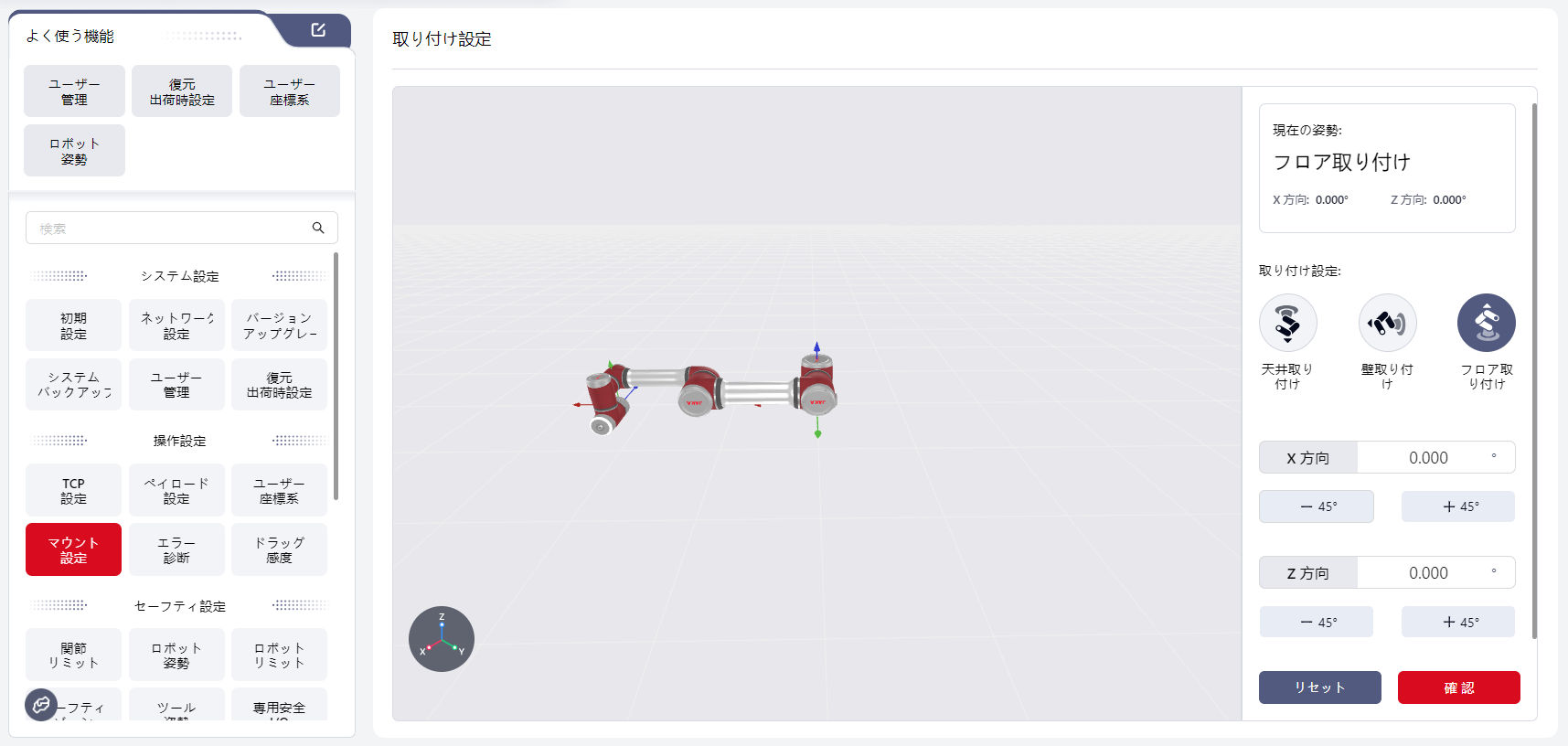
JAKAロボットは任意の角度で取り付け可能です。
取り付け後は、このインターフェースでロボットの実際の取り付け方向を記録する必要があります。これにより、操作の安全性が確保されます。具体的な手順は以下の通りです:
取り付け設定 セクションで、ロボットの実際の取り付け方向を選択します。
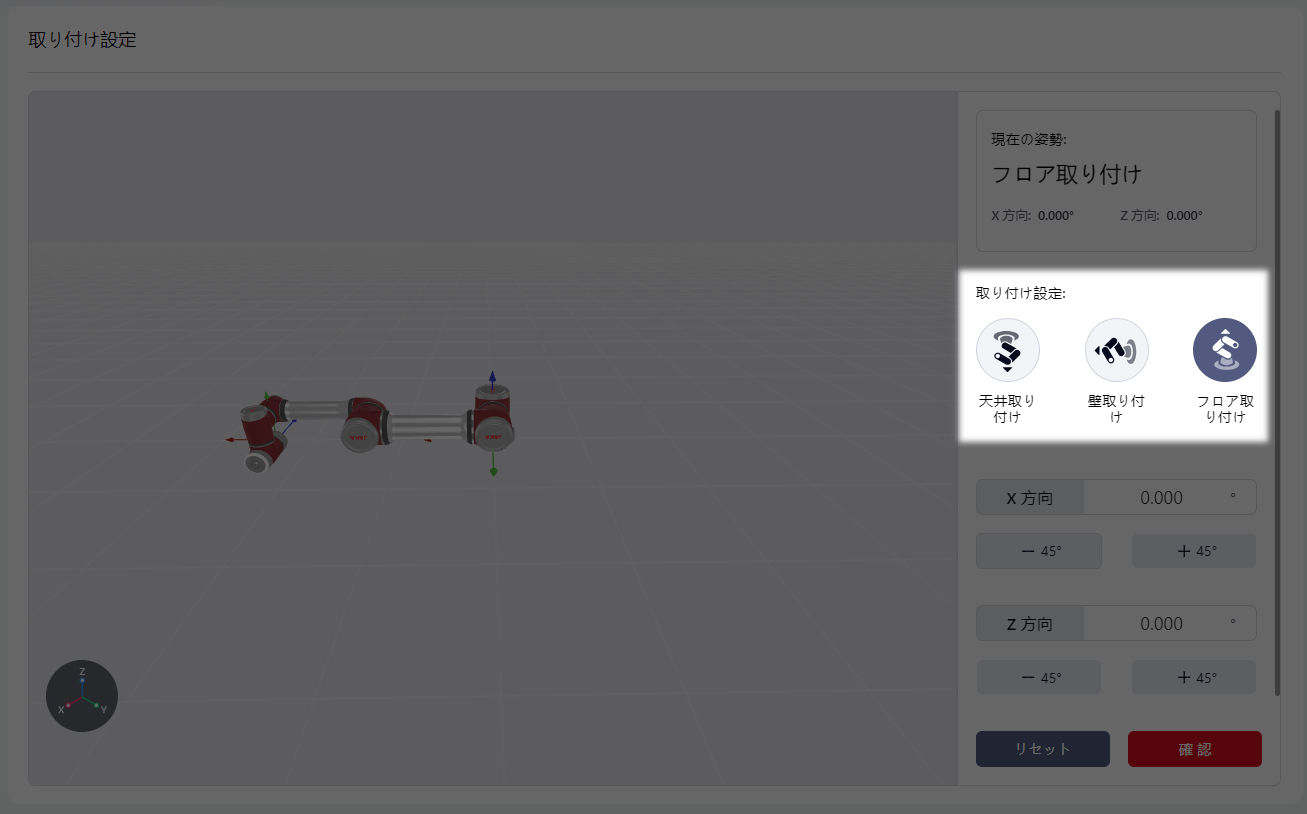
選択後、X方向 および Z方向 フィールドでロボットモデルを調整し、実際の方向に合わせます。

エラーディアグノシス

エラーが発生すると、コントローラは自動的にエラー情報を圧縮ファイルとして保存し、そのファイルにはエラーが発生したシステム時刻が名前として付けられます。これらの圧縮ファイルはエラー診断インターフェースに表示されます。
ユーザーは手動で 診断 をクリックしてエラーファイルをエクスポートし、ロボットの動作状況を分析できます。
診断モード中に、診断 をクリックすると、診断時間が延長されます。
エラーファイルに対して操作を行うためのボタンが対応しています。
安全設定
ジョイント制限
このインターフェースでは、各ジョイントのソフトリミット角度、速度制限、およびエラーアラーム閾値を設定できます。

ボタンをクリックして、対応する操作を実行できます。
注:
ジョイント前方制限、ジョイント逆方向制限、ジョイント速度制限の範囲は、インターフェースに表示されたデフォルト値に基づいています。ユーザーはこの範囲内でのみ値を調整できます。エラー閾値は、ロボットの動きのずれが設定した閾値を超えた場合にアラームをトリガーする閾値を指します(デフォルトは80%)。リセットをクリックすると、デフォルト値にリセットされます。
::: タブ @tab バージョン172 バージョン172では、ジョイント制限がデフォルト値ではない場合、右側のリセットボタンが赤色で表示されます。 :::
ロボット姿勢
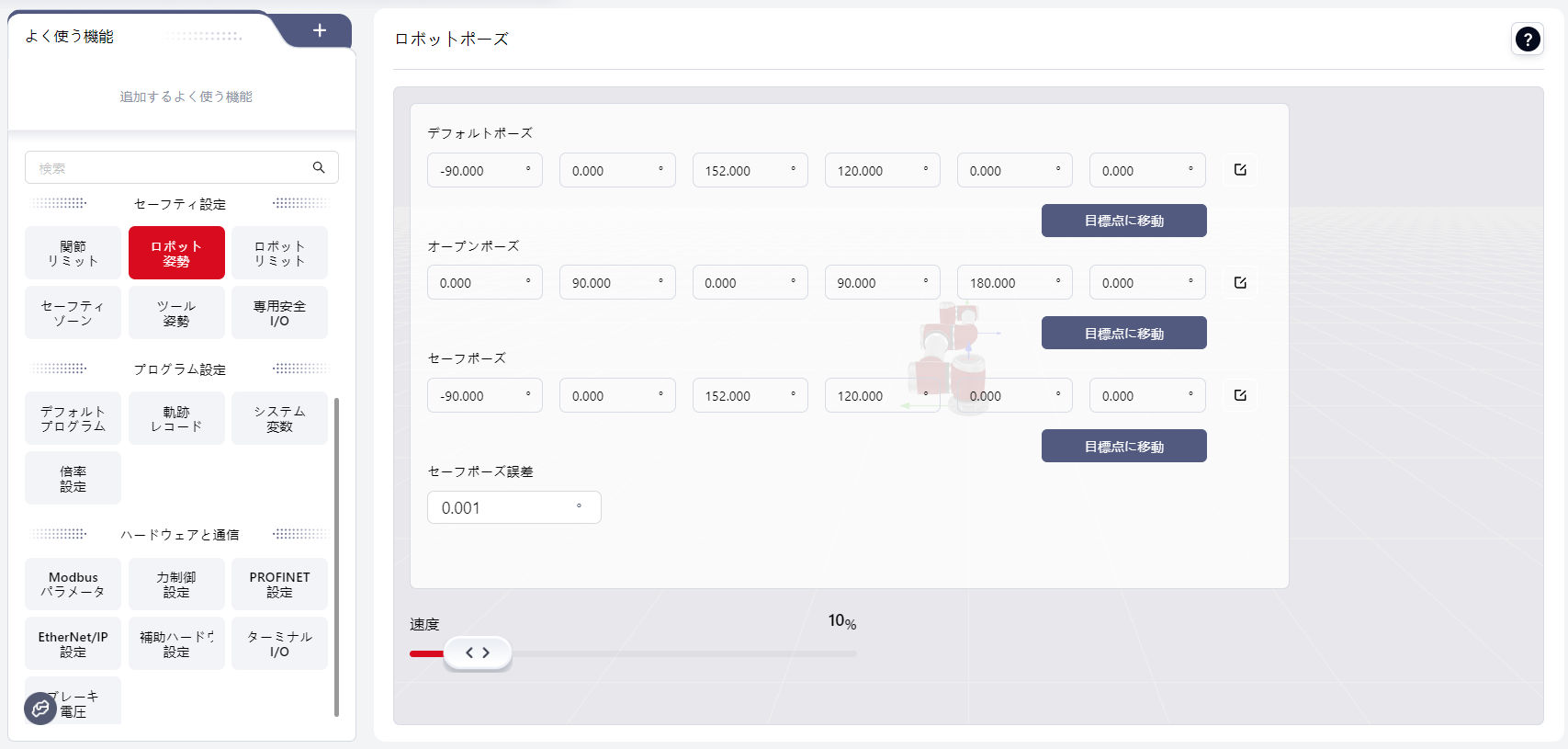
このインターフェースでは、ユーザーがロボットの 工場姿勢、開放姿勢、安全姿勢 を設定できます。右側のアイコンをクリックすると、これらの姿勢を設定するための操作ページにリダイレクトされます。 ユーザーはまた、ロボットを任意の他の姿勢に移動させ、その後このページに入り、工場姿勢、開放姿勢、安全姿勢 の下で ターゲットに移動 をクリックしてロボットを対応する姿勢に移動させることができます。
工場姿勢:ロボットが梱包時の姿勢。
開放姿勢:ジョイントの機械的ゼロ点キャリブレーションに使用されるゼロ姿勢。
安全姿勢:ユーザーが編集可能な姿勢で、初期姿勢として設定できます。コントローラのホームボタンを押すと、ロボットはこの姿勢に移動します。ロボットが初期姿勢に到達すると、「初期位置」機能I/Oをトリガーできます。
安全姿勢エラー:ユーザーは0.001〜3の範囲で設定できます。現在のジョイント角度と安全姿勢の対応するジョイント角度との誤差がこの許容範囲内にある場合、安全位置機能にリンクされたDOがトリガーされます。
速度:ロボットがターゲット位置に移動する速度を制御します。
モーション制限
衝突設定
クイック設定
ここでは、ロボットの衝突保護感度を設定できます。感度が高いほど、ロボットは動作中に衝突を報告しにくくなります。

カスタム
ユーザーは特定のオプションを調整して、衝突保護感度を設定できます。
力の制限 衝突アラームをトリガーするために必要な力で、値が高いほどロボットを停止させるために必要な力が増えます。
モーメント制限、TCP速度制限、力制限、停止時間、停止距離 はロボットの速度に影響します。値が低いほどロボットの動作が遅くなります。
衝突応答設定
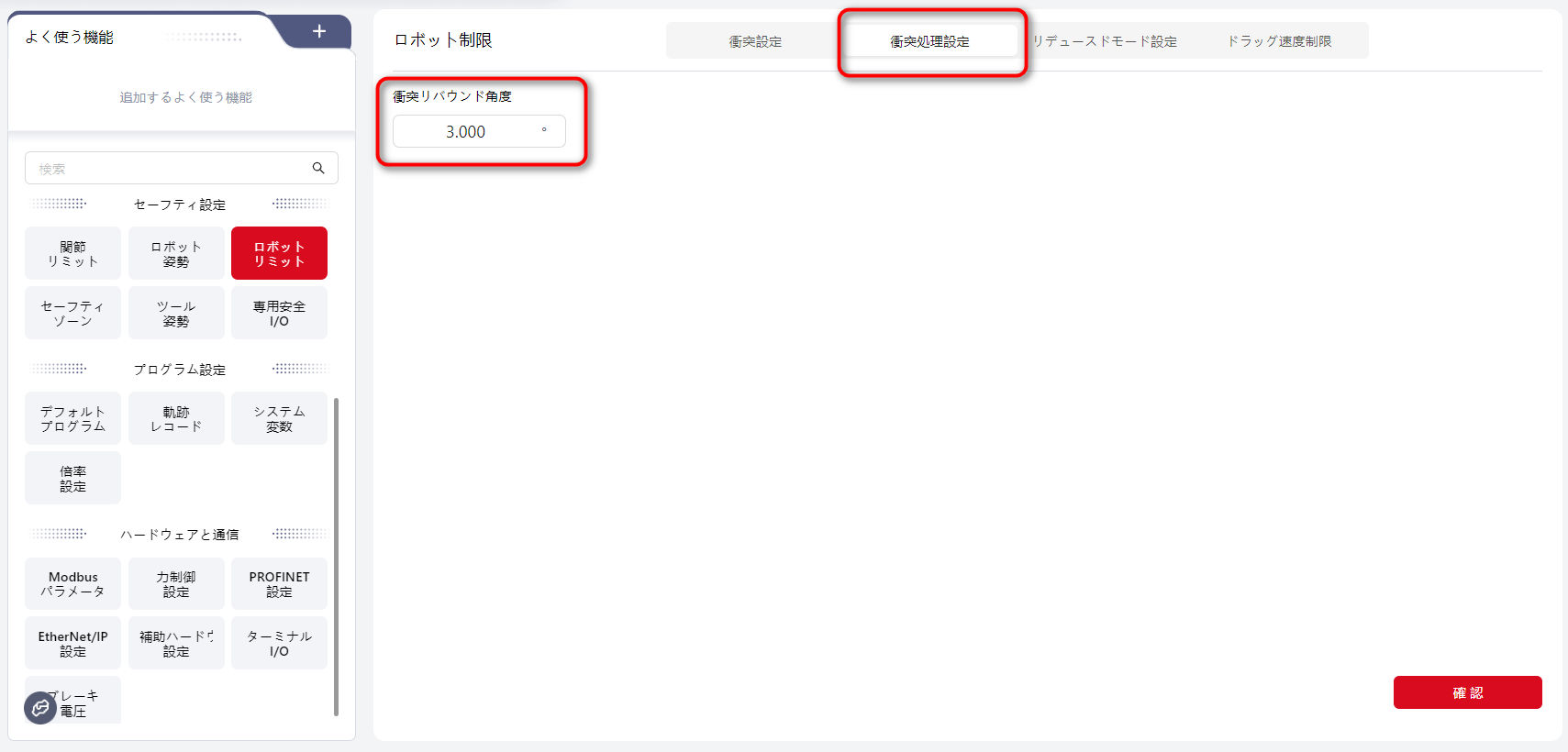
このインターフェースでは、ユーザーが衝突後の反発角度を設定できます。設定範囲は0°から3°までで、0°に設定するとロボットは衝突後に反発しません。
プログラム実行中に軽度の衝突が検出されると(ジョイント角度のフィードバック位置が指示位置から約1°逸脱する場合)、ロボットは停止し、プログラムが終了します。重度の衝突が発生した場合(ジョイント角度のフィードバック位置が約3.6°以上逸脱する場合)、ロボットは停止し、自己解除されます。
手動モードで衝突が発生した場合、反発角度設定に関係なくロボットは反発しません。さらに、外力が継続的に加えられると、ロボットは一定範囲内で押し込むことができます。
限定モード設定

このインターフェースでは、限定モードでのロボットのさまざまな制限値を設定できます。
スライダーをドラッグして数値を設定するか、直接数値を入力できます。デフォルトの最大範囲は、現在接続されているモデルの最大値に基づいています。
確認 をクリックして設定を適用すると、インターフェースに「安全性確認パラメータが変更されました」と表示されます。
ドラッグ速度制限

このインターフェースでは、ロボットのTCP(ツールセンターポイント)のドラッグ速度を設定できます。設定範囲は50 mm/sから1500 mm/sまでです。
この速度設定は、ロボットをドラッグする際のTCP速度にのみ影響します。設定された制限を超える速度でドラッグが行われた場合、ロボットは移動を停止し、ドラッグモードを終了します。
安全ゾーン
ユーザーはこのインターフェースで、安全ゾーンを設定し、ロボットのエンドまたは肘(ジョイント3)の動作範囲を制限することで、作業中の他の物体との衝突を防止できます。

起動時有効、運転時有効:
起動時有効は、ロボットが電源を入れたときに安全ゾーンが即座に有効になることを意味します。
運転時有効は、プログラム実行中のみ安全ゾーンが有効で、ドラッグモード、手動操作、またはSDKによるロボット制御時には無効になります。
肘制限:
このスイッチをオンにすると、安全平面はロボットの肘(ジョイント3)にも適用され、肘の周囲に球形の範囲が有効になります。
トリガー有効:
ロボットが安全平面に到達または超過したときの反応を設定します。
- 停止:ロボットは停止し、プログラムが終了し、ロボットは自己解除されます。安全ゾーン内に戻ることで再度有効化できます。
- 保護停止:ロボットは減速して停止し、プログラムは一時停止し、「安全平面保護停止」というポップアップが表示されます。「OK」をクリックすると、ロボットは安全平面を通過して再開できます。安全平面が再度トリガーされると、ロボットは再度保護停止を実行します。安全DIの「保護停止リセット入力」を使用して保護停止を解除し、安全平面を通過して再開することもできます。
- 減速モード:安全平面がトリガーされると、ロボットは減速モード(TCP速度 ≤ 250 mm/s)に移行します。ポップアップが表示され、「ロボットは減速モードに入りました」と通知されます。「OK」をクリックすると、ロボットは安全平面を通過するまで減速モードを維持します。
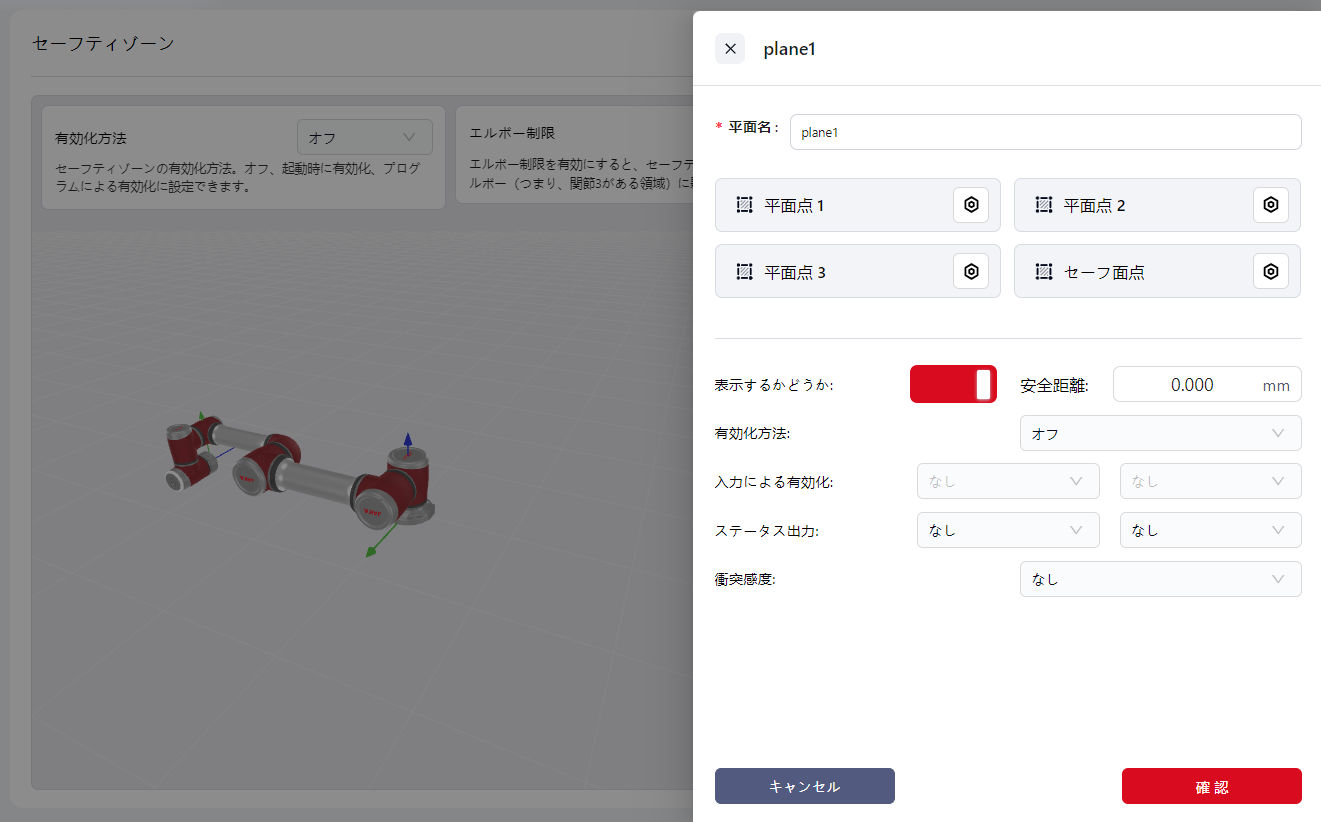
安全平面の設定

最大6つの異なる安全平面を設定できます。各平面は無限に広がります。設定手順は以下の通りです:
+をクリックして設定ページに入ります。- 必要に応じて
平面名フィールドに名前を変更します。 Pointの隣のアイコンをクリックして、手動操作インターフェースに入り、3つのポイントの位置を設定します。コントローラはこれらのポイントに基づいて安全平面の位置を計算し、3Dモデルエリアに表示します。安全平面ポイントの隣のアイコンをクリックして手動操作インターフェースに入り、安全平面の片側を安全側として定義し、ロボットをその側に移動させます。「OK」をクリックして確認します。エンドエフェクタの原点が安全側となります。安全距離を設定します。ロボットのエンドエフェクタと安全平面の間の距離です。実際の距離がこの値より小さくなると、安全平面がトリガーされ、ロボットの動作状態が変わります。有効にするスイッチをオンにします。
注:
ロボットモデルや座標系を変更しても、すでに設定された安全平面の位置は変更されません。
安全キューブの設定
+追加をクリックして設定ページに入ります。キューブ名フィールドに名前を入力します。参照座標系を設定します:- ワールド座標系、設定されたユーザー座標系、またはカスタム座標系を選択できます。
カスタムを選択した場合、ワールド座標系に対するカスタム座標系の回転角度をRX、RY、RZフィールドに入力する必要があります。 選択したユーザー座標系の位置が「ユーザー座標系」インターフェースで変更されると、参照座標系は自動的にカスタムに変更され、RX、RY、RZの値はユーザー座標系変更前のものになります。
対角点1と対角点2を設定します。これによりコントローラはキューブを計算します。対角点の位置は参照座標系に対して相対的です。ユーザーは以下のいずれかの方法で設定できます:- 直接X、Y、Zフィールドに対角点の距離を入力する。
編集をクリックしてロボットをターゲットポイントに移動させる。ロボットをドラッグする場合、対角点はロボットのエンドエフェクタフランジの中心です。
有効な安全エリアを設定します:- 内部安全:キューブの内部が安全エリアです。
- 外部安全:キューブの外部が安全エリアです。
安全距離を設定します。これはロボットのエンドエフェクタと安全エリアの間の距離(ミリメートル単位)です。この実際の距離がこの値より小さいと、安全キューブがトリガーされ、ロボットの動作状態が変更されます。有効化方法を選択します:
無効:現在の安全キューブを有効にしません。
有効化:現在の安全キューブを有効にします。
入力で有効化:現在の安全キューブをDIにバインドします。このDIが入力信号を受け取ると、安全キューブが有効になります。
入力で有効化を選択した場合、この安全キューブをバインドするDIを**入力有効化** フィールドから選択できます。
1つのDIに複数の安全キューブをバインドできます。
- 現在の安全キューブがトリガーされたかどうかを視覚的に確認するには、DOにバインドできます:
ステータス出力ドロップダウンで、安全キューブにバインドするDOを選択します。安全キューブがトリガーされると、このDOのステータスがI/Oパネルで「ON」と表示されます。1つのDOは1つの安全平面または安全キューブにのみバインドできます。
衝突感度を設定する場合、ロボットが危険ゾーンに入ると、衝突レベルが安全ゾーンで定義されたレベルに切り替わります。ロボットが安全ゾーンに戻ると、衝突レベルは「モーション制限」設定で定義されたものに戻ります。ロボットが複数の安全ゾーンに入り、危険ゾーンが定義されている場合、衝突レベルは最も高い感度に切り替わります。数値が低いほど感度が高くなります(LV1 > LV2)。確認をクリックして安全キューブを保存します。
セット安全キューブ

+追加をクリックして設定ページに入ります。キューブ名フィールドにキューブの名前を入力します。基準座標系を設定します:- ワールド座標系、設定済みのユーザー座標系、またはカスタム座標系を設定できます。
カスタムを選択した場合、RX、RY、RZフィールドにワールド座標系に対するカスタム座標系の回転角度を入力する必要があります。 「ユーザー座標系」インターフェースで選択したユーザー座標系の位置が変更されると、基準座標系は自動的にカスタムに変更され、RX、RY、RZの値はユーザー座標系が変更される前の値となります。
対角点1と対角点2を設定します。これらはコントローラがキューブを計算するために使用します。対角点の位置は基準座標系に対して相対的です。以下の方法で設定できます:- 基準座標系の原点から対角点までの距離をX、Y、Zフィールドに直接入力します。
編集をクリックして、ロボットをターゲットポイントに移動させたり、ドラッグしたりします。ロボットをドラッグする場合、対角点はロボットのエンドエフェクターフランジの中心です。
有効安全エリアを設定します:- 内部安全:キューブの内部が安全エリアになります。
- 外部安全:キューブの外部が安全エリアになります。
安全距離を設定します:これはロボットのエンドエフェクタと安全エリアの間の距離(ミリメートル単位)です。ロボットのエンドエフェクタがこの値よりも安全エリアに近づくと、安全キューブがトリガーされ、ロボットの動作状態が変更されます。起動方法を選択します:- オフ:現在の安全キューブを有効にしません。
- 起動:現在の安全キューブを有効にします。
- 入力起動:現在の安全平面をDIにバインドします。このDIが入力信号を受け取ると、安全キューブが起動します。
- 「入力起動」を選択した場合、
入力起動フィールドのドロップダウンからDIを選択してこの安全平面をバインドできます。
- 「入力起動」を選択した場合、
単一のDIは複数の安全平面および安全キューブにバインドできます。
現在の安全キューブがトリガーされたかどうかを視覚的に確認するには、それをDOにバインドできます:
ステータス出力ドロップダウンで、バインドするDOを選択します。安全キューブがトリガーされると、このDOのステータスはI/Oパネルで「ON」と表示されます。
DOは一度に1つの安全平面または安全キューブにのみバインドできます。
衝突感度を設定します。衝突感度が設定されている場合、ロボットが危険領域に入ると、衝突レベルは安全領域で定義されたレベルに切り替わります。ロボットが安全領域に戻ると、衝突レベルは最も敏感な設定に切り替わります。数値が低いほど、感度は高くなります(LV1 > LV2)。確認をクリックして、安全キューブを保存します。
ツール方向
このインターフェースでは、ツール方向を設定し、ロボットのエンドエフェクターの動きをコーン状の範囲内に制限して、エンドエフェクターとロボット本体や外部環境との干渉を回避します。
コーン範囲図:
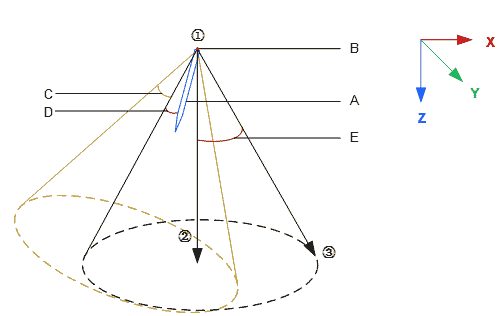
- A:エンドエフェクターのツール
- B:選択された座標系の原点
- C:ツール方向のオフセット角度、X軸オフセット
- D:安全距離
- E:制限範囲

Version 172では、ユーザーが設定したコーンを視覚化しており、下図の青いコーンとして表示され、ユーザーは有効な制限範囲を直感的に理解できます。
電源オン時の開始 実行開始:
電源オン時に有効:ロボットの電源が入ると、ツール方向制限が即座に有効になります。
操作中に有効:ツール方向制限は、プログラム実行中のみ有効です。ドラッグや手動操作モード中には有効ではありません。
座標系の選択:
エンドエフェクターの位置とコーンの頂点を決定します。座標系の原点が頂点です。
ワールド座標系とエンドフランジ中心から選択できます。
ツール方向:
選択された座標系のX軸またはZ軸のオフセット角度に基づいて、エンドエフェクターの方向を決定します。
安全距離:
定義されたツール境界とエンドエフェクターとの距離で、0から設定値までの範囲です。距離が安全距離を下回ると、"ツール方向安全制限に接近"というポップアップ警告が表示されます。エンドエフェクターが境界に達すると、ロボットは停止し、"方向制限を超過 - 保護停止"と表示されます。
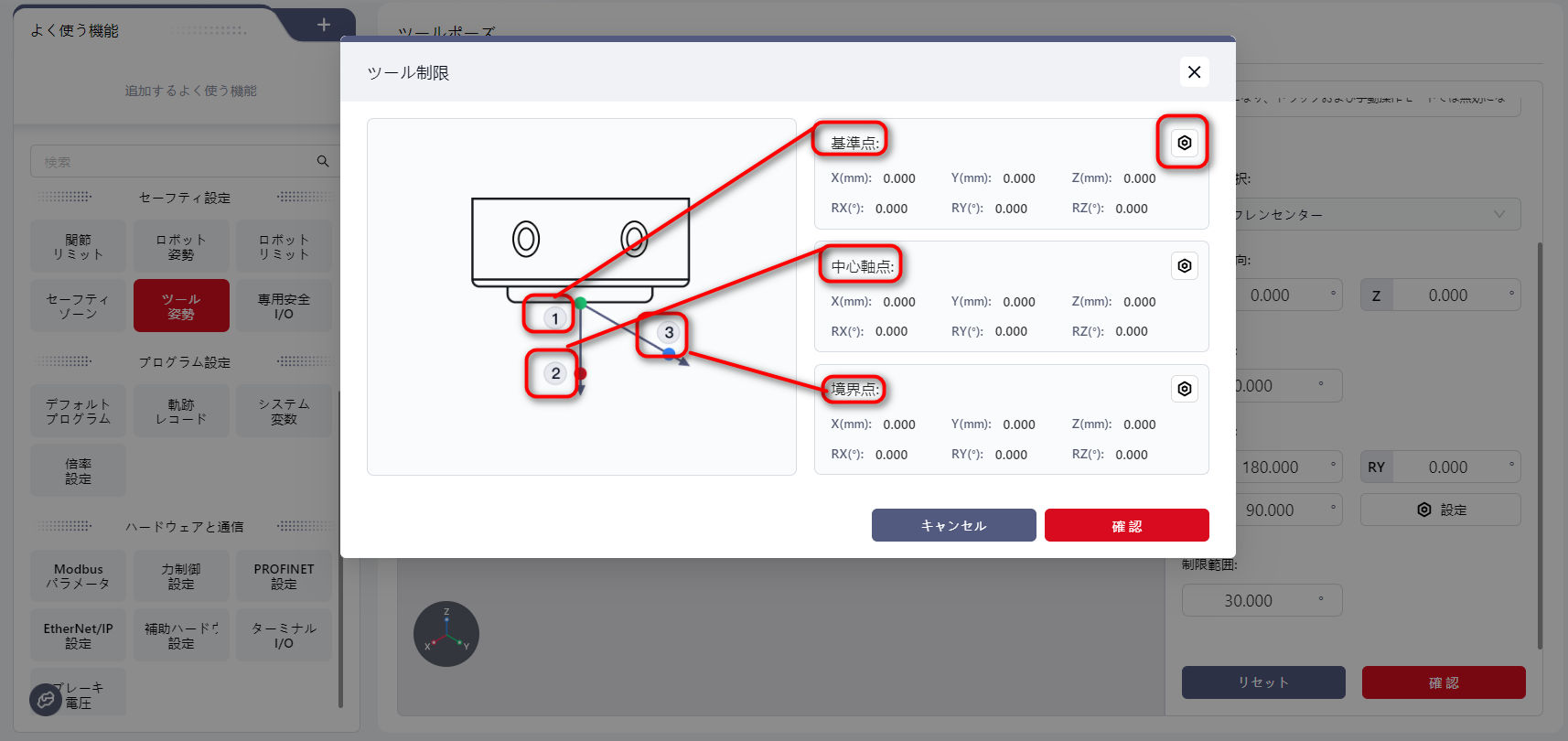
制限方向:
ツール境界の位置とサイズを定義します。
- 方法1:RX、RY、RZ角度を直接入力します。
- 方法2:設定をクリックしてツール制限インターフェースに入り、再度設定アイコンをクリックして手動操作ページに入ります。ポイント1、2、3の位置を決定し、コントローラーはこれらのポイントに基づいて**
X Y Z**の値を計算します。
制限範囲:
コーンの中心線とその境界との角度を指し、範囲は5°から180°まで設定できます。
注意:
ロボットが動作中の場合、コーンはロボットの移動方向に基づいてワールド座標系に沿って移動します。
専用安全I/O
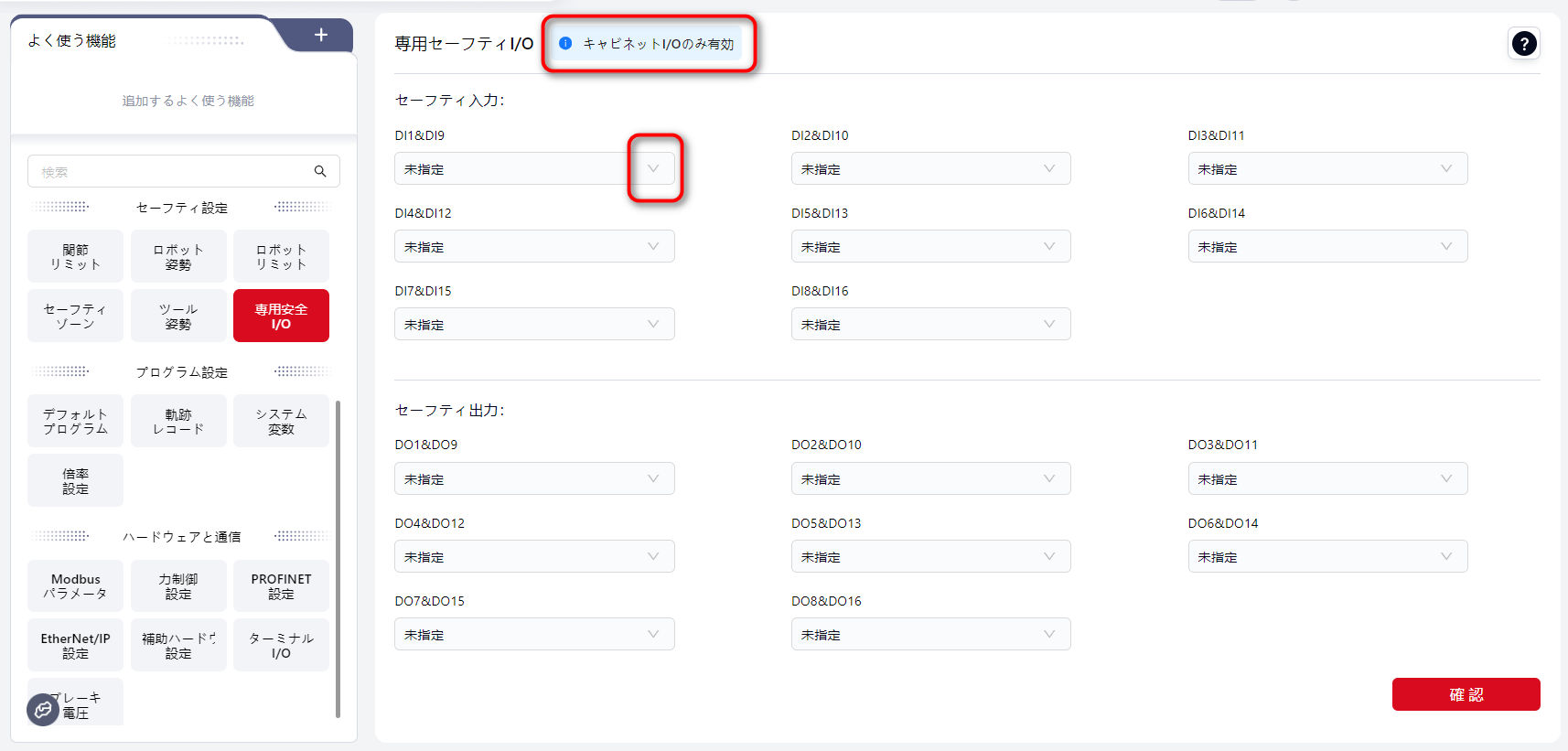
ユーザーは、制御キャビネットパネルの物理I/Oを設定して安全信号をバインドし、制御キャビネットのI/Oを専用の安全I/O信号に変換してロボットの安全アクションを制御し、その安全状態を監視できます。これらの専用安全I/O信号はデュアルループ信号として動作します。
標準のキャビネットには8つの再利用可能な安全I/Oチャネルがあります。すべての安全DI(デジタル入力)チャネルは同じ機能で設定でき、すべての安全DO(デジタル出力)チャネルも同じ機能で設定できます。具体的な機能は以下の通りです:
| 名称 | 機能 | I/Oタイプ |
|---|---|---|
| 追加の非常停止入力 | この入力が低いと、ロボットは非常停止を実行します。 | 入力 |
| 追加の安全ガード停止入力 | この入力が低いと、ロボットは保護停止を実行します。 | 入力 |
| 安全ガード停止リセット入力 | 入力信号が低から高に変化すると、保護停止リセットが実行されます。 | 入力 |
| 低減モード入力 | この入力が低いと、ロボットは低減モードに入ります。 | 入力 |
| 三位置イネーブル入力 | この入力は三位置スイッチと連動します。位置1または3では低レベル、ロボットは三位置有効制限を実行します。位置2では高レベルで、制限は解除されます。 | 入力 |
| 衝突検出無効 | 有効にすると、この入力でロボットの衝突検出が無効になります。 | 入力 |
| 衝突感度レベル1設定 | 有効にすると、この入力でロボットの衝突感度レベルがLV1に設定されます。数値が低いほど感度が高くなります。複数のレベルがトリガーされると、厳しいレベルが優先されます。 | 入力 |
| 衝突感度レベル2設定 | 有効にすると、この入力でロボットの衝突感度レベルがLV2に設定されます。数値が低いほど感度が高くなります。複数のレベルがトリガーされると、厳しいレベルが優先されます。 | 入力 |
| 衝突感度レベル3設定 | 有効にすると、この入力でロボットの衝突感度レベルがLV3に設定されます。数値が低いほど感度が高くなります。複数のレベルがトリガーされると、厳しいレベルが優先されます。 | 入力 |
| 衝突感度レベル4設定 | 有効にすると、この入力でロボットの衝突感度レベルがLV4に設定されます。数値が低いほど感度が高くなります。複数のレベルがトリガーされると、厳しいレベルが優先されます。 | 入力 |
| 衝突感度レベル5設定 | 有効にすると、この入力でロボットの衝突感度レベルがLV5に設定されます。数値が低いほど感度が高くなります。複数のレベルがトリガーされると、厳しいレベルが優先されます。 | 入力 |
| 衝突感度最低設定 | 有効にすると、この入力でロボットの衝突感度が最低レベルに設定されます。 | 入力 |
| 非常停止ボタンの状態出力 | 非常停止ハンドルが押されていると低い出力を行います。 | 出力 |
| システム非常停止状態出力 | システムが非常停止状態にあると低い出力を行います。 | 出力 |
| システム保護停止状態出力 | システムが保護停止状態にあると低い出力を行います。 | 出力 |
| 動作状態出力 | ロボットが動作中であると低い出力を行います。 | 出力 |
| 非停止状態出力 | ロボットが停止中または非常停止や保護停止により停止中であると高い出力を行います。 | 出力 |
| 低減モード状態出力 | ロボットが低減モード中であると低い出力を行います。 | 出力 |
| 非低減モード状態出力 | ロボットが低減モードでないと低い出力を行います。 | 出力 |
| 衝突検出無効状態出力 | 衝突検出が無効の場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度レベル1状態出力 | ロボットの衝突感度がLV1に設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度レベル2状態出力 | ロボットの衝突感度がLV2に設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度レベル3状態出力 | ロボットの衝突感度がLV3に設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度レベル4状態出力 | ロボットの衝突感度がLV4に設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度レベル5状態出力 | ロボットの衝突感度がLV5に設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
| 衝突感度最低状態出力 | ロボットの衝突感度が最低レベルに設定されている場合、低い出力を行います。出力状態はロボットが有効になった後、リアルタイムで更新されます。 | 出力 |
安全DI信号の冗長性:
すべての8チャネルの安全デジタル入力信号は冗長の同等入力信号です。
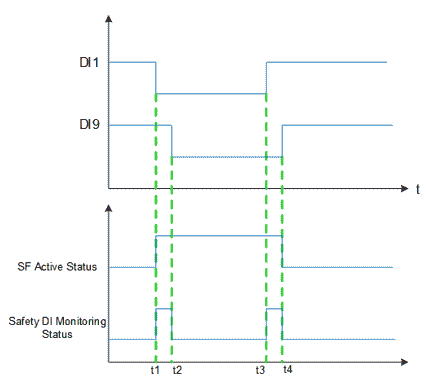
もしも安全信号の1つ(例えばDI1とDI9)が低い場合、安全機能が有効になります(t1)。安全機能を有効にするために使用される信号は安定していなければなりません。それ以外の場合、ロボットは停止し、再起動が必要です。
安全機能がオフになると、ロボットは安全状態を解除し、DI1とDI9は両方とも低から高(立ち上がりエッジ)に信号が遷移しなければなりません。DI1とDI9の信号に差異があり、その差異が1秒以上の許容時間(例えばt2-t1またはt4-t3)を超える場合、SCB(安全制御ボード)は安全DIに故障が発生したと判断し、安全DI故障ロールバック機能がトリガーされます。
修理後、ロボットは再起動して安全DIの故障を解除する必要があります。故障が解除されていない場合、ロボットは電源を入れることができません。
安全DI故障ロールバック機能:
- ロボットは減速して停止し、電源がオフになり、プログラムが一時停止します。
- 故障したDIチャネルは、実際の入力信号の代わりに低レベル信号で処理されます。この故障状態は、ロボットが再起動され、エラーが解除されるまで持続します。
- インターフェースに安全DIエラーが発生したことが表示されます。故障が修理された後、ロボットはエラー状態を解除するために再起動する必要があります。
プログラム設定
デフォルトプログラム
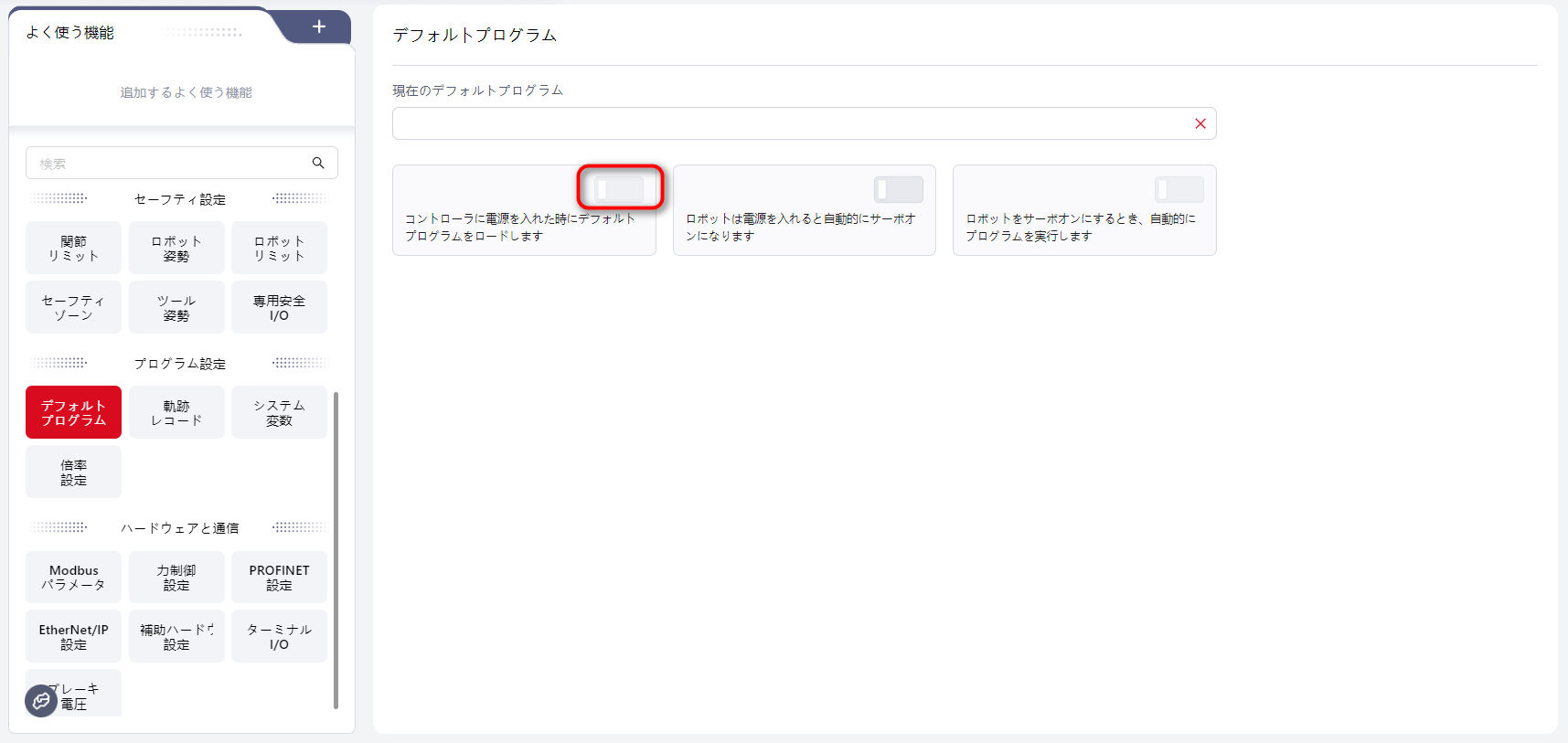
このインターフェースでは、既存のプログラムをデフォルトプログラムとして設定できます。設定すると、次のオプションを有効にして特定の機能を実現できます:
ロボットが有効化された時にデフォルトプログラムを読み込む
このスイッチをオンにすると、ロボットが有効化された後にデフォルトプログラムが自動的に読み込まれます。
警告:
デフォルトプログラムが設定されていて、**
ロボットが有効化された時にデフォルトプログラムを読み込むと自動実行信号(例:ロボットが有効化された時に自動的にプログラムを実行**がオン)がトリガーされると、Coboπはデフォルトプログラムを実行します。デフォルトプログラムが設定されていて、**
ロボットが有効化された時にデフォルトプログラムを読み込む**がオンでも、自動実行信号がトリガーされなければ、Coboπはプログラムを実行しません。デフォルトプログラムが設定されていて、**
ロボットが有効化された時にデフォルトプログラムを読み込む**がオンでも、自動実行信号がトリガーされると、Coboπはエラーポップアップを表示します。デフォルトプログラムが設定されていない場合でも、**
ロボットが有効化された時にデフォルトプログラムを読み込む**がオンで、自動実行信号がトリガーされると、Coboπはエラーポップアップを表示します。デフォルトプログラムが設定されていて、**
ロボットが有効化された時にデフォルトプログラムを読み込む**と自動実行信号がトリガーされ、別の非デフォルトプログラムが開いている場合、デフォルトプログラムが実行されます。
コントローラーはバックグラウンドで現在開いているプログラムに未保存の変更があるか確認します。未保存の変更がある場合、プログラミングインターフェースはグレーアウトされ、現在開いているプログラムが表示され、ポップアップで「現在のプログラムに未保存の変更があります。プログラム停止後に確認してください」と表示されます。
すべての変更が保存されている場合は、直接デフォルトプログラムに切り替えます。
ロボットが電源オン時に自動で有効化される
このスイッチをオンにすると、ロボットは電源が入ると自動的に有効化されます。
ロボットが有効化された時に自動でプログラムが実行される
このスイッチをオンにすると、ロボットが有効化された後、デフォルトプログラムまたは現在開いているプログラムが自動的に実行されます。
デフォルトプログラムが設定されていない場合、現在開いているプログラムが実行されます。
デフォルトプログラムが設定されていて、**ロボットが有効化された時にデフォルトプログラムを読み込む**がオンであれば、デフォルトプログラムが実行されます。
軌道録画
このインターフェースでは、コントローラーがロボットの軌道をドラッグアンドドロップ、手動操作、またはその他の方法で録画し、軌道ファイルを生成できます。
現在の軌道は、ロボットがプログラムを実行している間にも録画できます。
プログラミング中に、録画された軌道ファイルは軌道録画コマンドを使って呼び出すことができます。
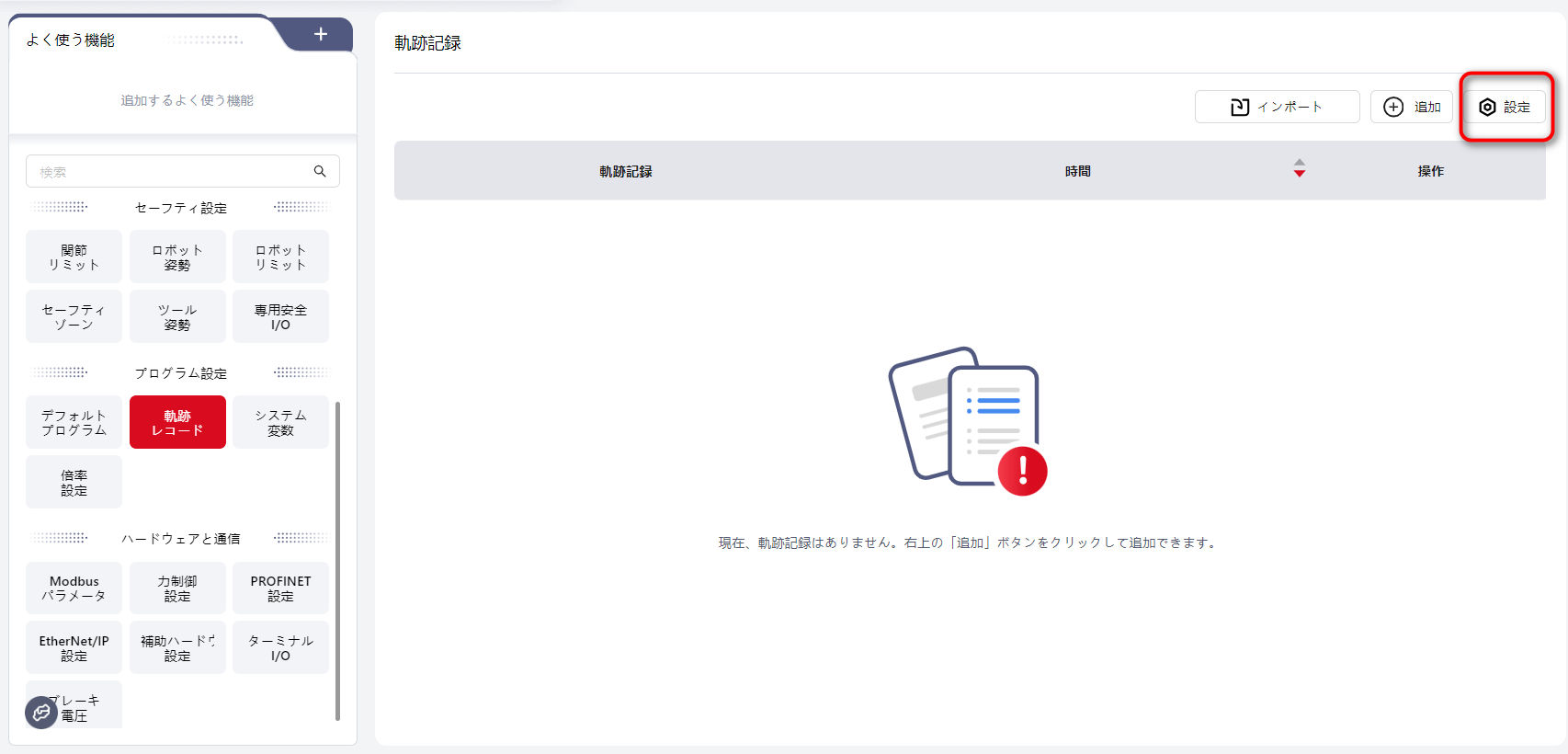
- **
設定**をクリックして軌道移動編集インターフェースを開きます。
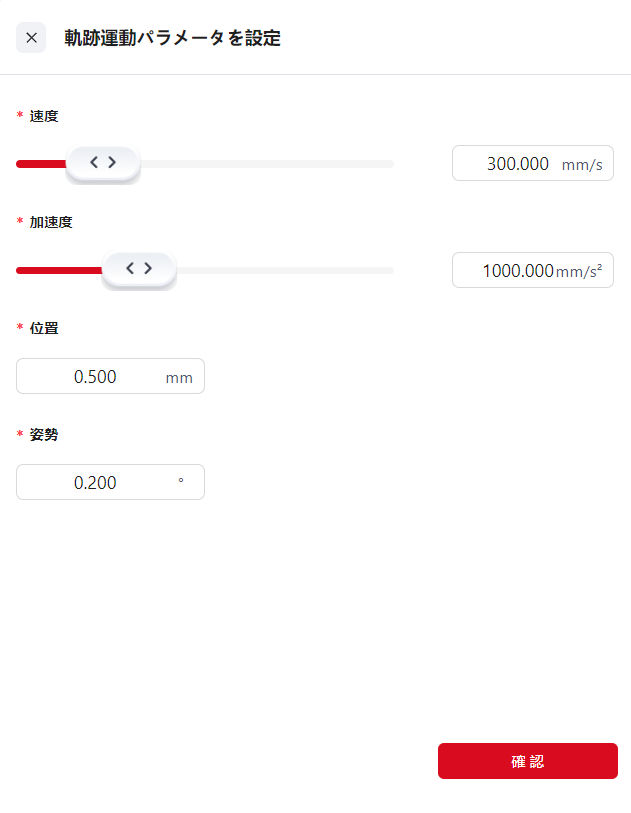
注意:
軌道の位置や方向の変化が設定された位置や方向の精度の10倍未満である場合、軌道は生成されません。
そのため、軌道の移動距離が短い場合は、位置と方向の精度を0.1に設定することをお勧めします。
- **
追加をクリックして確認ウィンドウを表示し、OK**をクリックします。
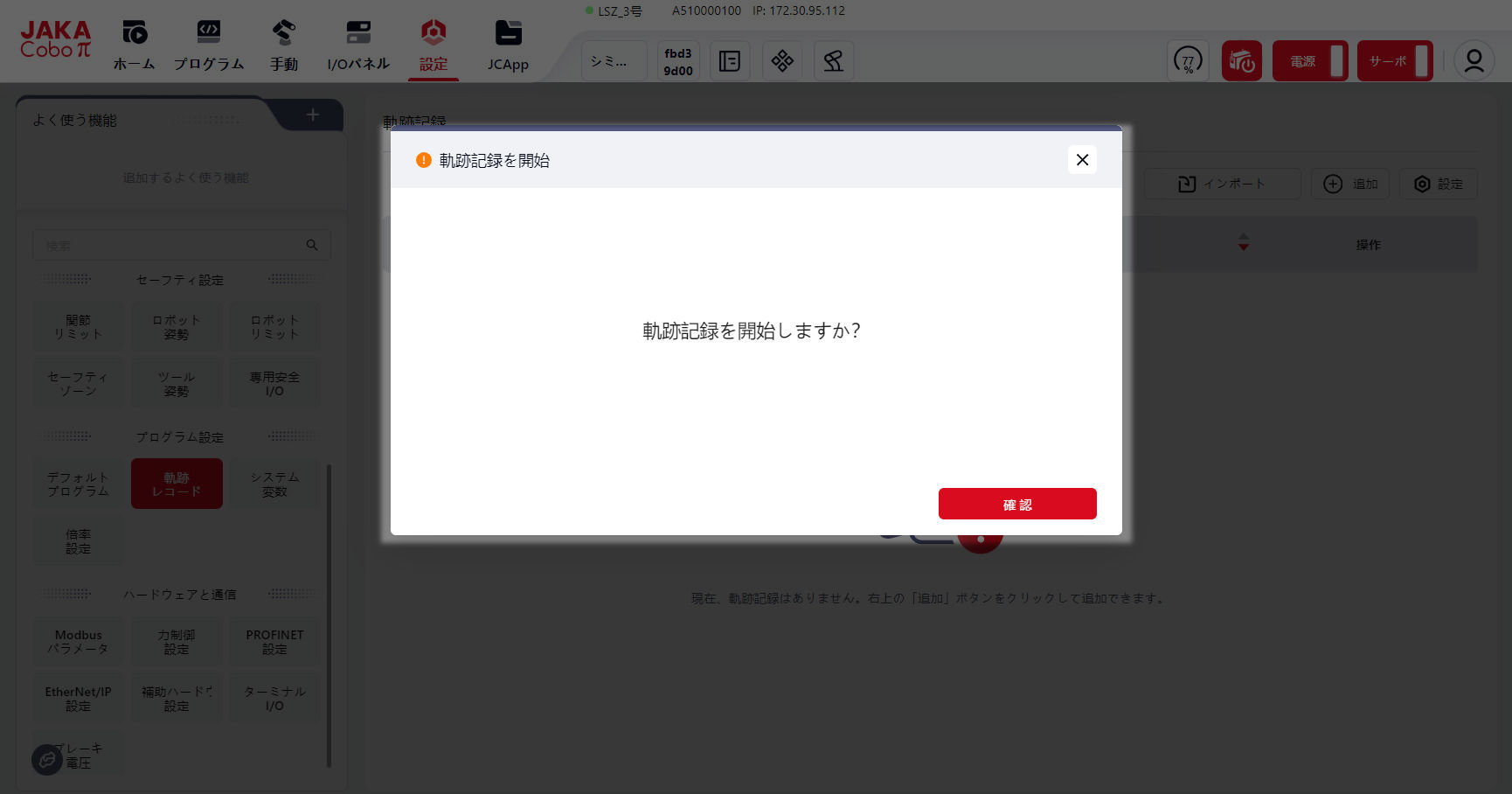
この時点で、ページに「軌道を録画しています」と表示されます。
ドラッグモードまたは手動操作で、ロボットに所望の動作をさせます。
動作指導が完了したら、上部のナビゲーションバーのS字型の軌道録画ボタンをクリックして録画を停止します。インターフェースは軌道ファイルを生成します。

注意:
- 軌道録画コマンドは、プログラミングコントロールインターフェースで軌道を表すために呼び出すことができます。
- 軌道表現機能は経路情報のみを記録し、速度情報は記録しません。
- 停止状態では、ポイント録画は繰り返されません。
- 録画が手動で停止されない場合、サンプリングポイントが100,000点に達すると自動的に終了し、軌道ファイルが生成されます。
システム変数

このインターフェースでは、すべてのプログラムで使用できるシステム変数を作成できます。
システム変数はコントローラーに独立して保存され、数値のみ(範囲:-65535〜65535)で、どのプログラムからも呼び出して変更できます。
これらの変数の値は、プログラムの開始や停止、ロボットの電源オンやオフ、または制御キャビネットのシャットダウン時に変更されたりリセットされたりすることはありません。
**追加**をクリックして変数編集インターフェースに入ります。
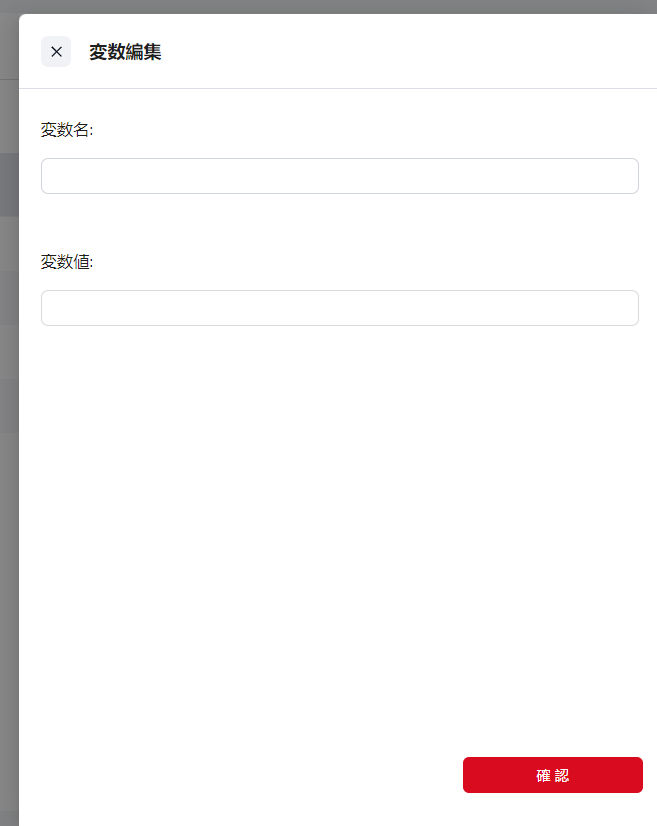
編集が完了すると、新しく追加された変数がインターフェースに表示されます。
右側のアイコンをクリックして、対応する操作を実行できます。

注意:
最大で100個のシステム変数を保存できます。
新しいシステム変数は、プログラミングコントロールインターフェースの変数コマンドバーでも作成できます。
減速速度設定
減速速度設定は、プログラム実行中のロボットの移動速度を調整するために使用されます。設定方法は以下の通りです:

警告:
レベル2の減速速度値は、レベル1の減速速度値より小さい必要があります。
注意:
このインターフェースで設定を完了した後、**I/Oパネル**を使用してDIをレベル1またはレベル2の減速速度モードに設定し、機能をトリガーする必要があります。
レベル1とレベル2の両方の減速速度が設定されている場合、レベル2の減速速度が優先されます。
減速速度設定はプログラム実行中にのみ適用され、ドラッグモードやJOGモードでは適用されません。
設定が正常に適用されると、プログラム実行中にロボットは設定された速度で動作します。
例えば、レベル1の減速速度が55%に設定されている場合、プログラミングインターフェースに表示される速度は55%となり、ロボットはこの速度で移動します。
Modbus設定
Coboπは、Modbus TCP/IPおよびModbus RTU通信プロトコルをサポートしており、ロボットはスレーブデバイスとして機能します。
警告:
設定を構成する際は、ロボットが電源オフおよび無効状態であることを確認してください。
注意:
ロボットがマスターデバイスとして機能する場合の設定も、このページで行うことができます。詳細な手順については、拡張I/O、ロボットをマスターとして使用を参照してください。

Modbus RTU
警告:
この機能はカスタマイズが必要です。
- 標準キャビネットの場合、制御キャビネットの前面パネルにあるRS485インターフェースに接続します。
- MiniCabの場合、制御キャビネットの前面パネルにあるPIN19およびPIN20のI/Oインターフェースに接続します。インターフェースの位置や配線方法については、ハードウェアユーザーマニュアルを参照してください。

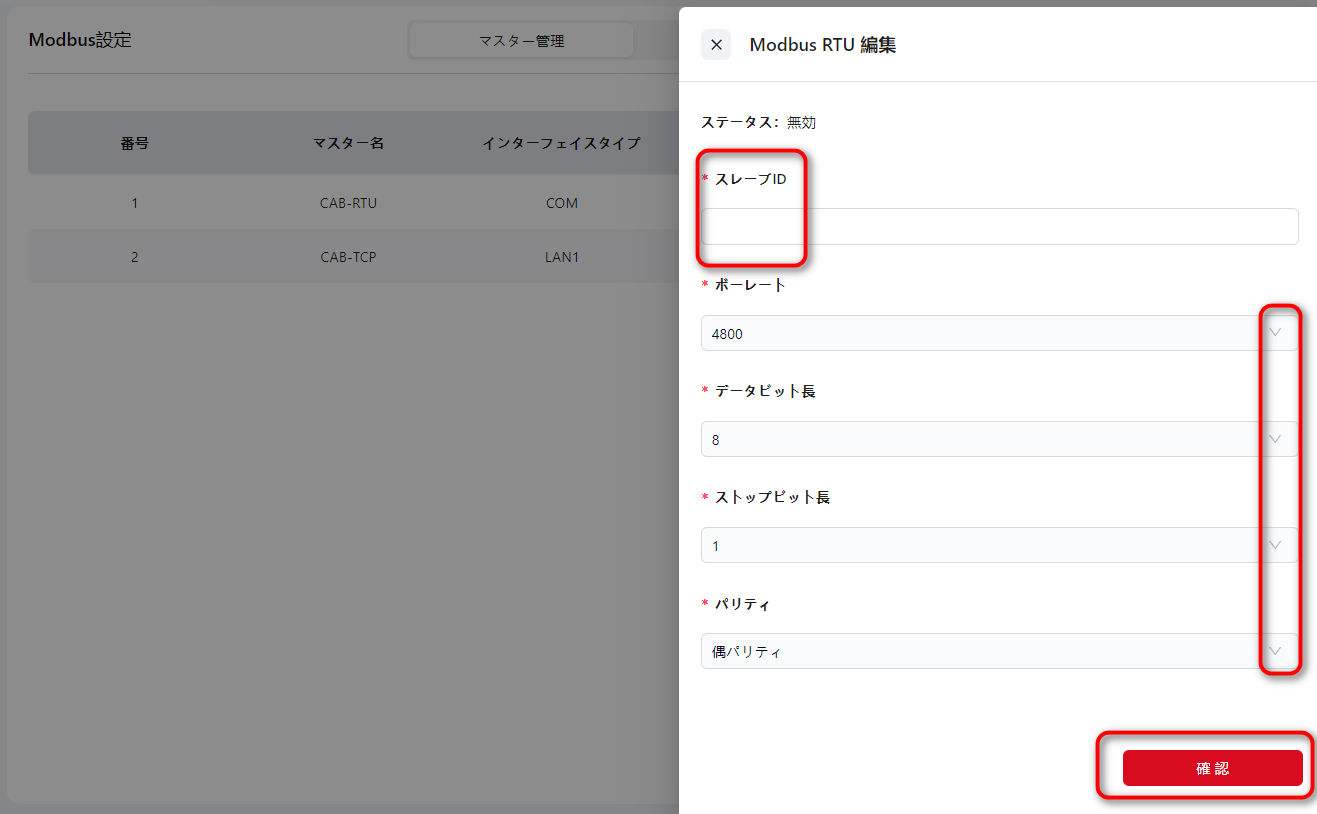
- **
Modbus設定でマスターステーション管理-CAB-RTUを選択します。編集アイコンをクリックすると、特定の操作ページが表示されます。スレーブノード番号を入力し、ボーレート、データビット、ストップビット、パリティを選択して、OK**をクリックします。 - 設定が正常に適用されたら、制御キャビネットの電源を切り、再起動してからロボットを再接続して設定を有効にします。
- マスターデバイスとの接続が確立したら、Modbusアドレステーブルのレジスタアドレスとファンクションコードに基づいて、ロボットの状態を読み取ったり、ロボットのI/O信号を制御するプログラムを記述できます。この情報は**
I/Oパネル-Modbus**で確認できます。
Modbus TCP/IP
- 標準キャビネットを使用している場合、制御キャビネットの下部にあるネットワークポートに接続します。
- MiniCabを使用している場合、LAN2ポートに接続します。ポートの位置については、ハードウェアユーザーマニュアルを参照してください。

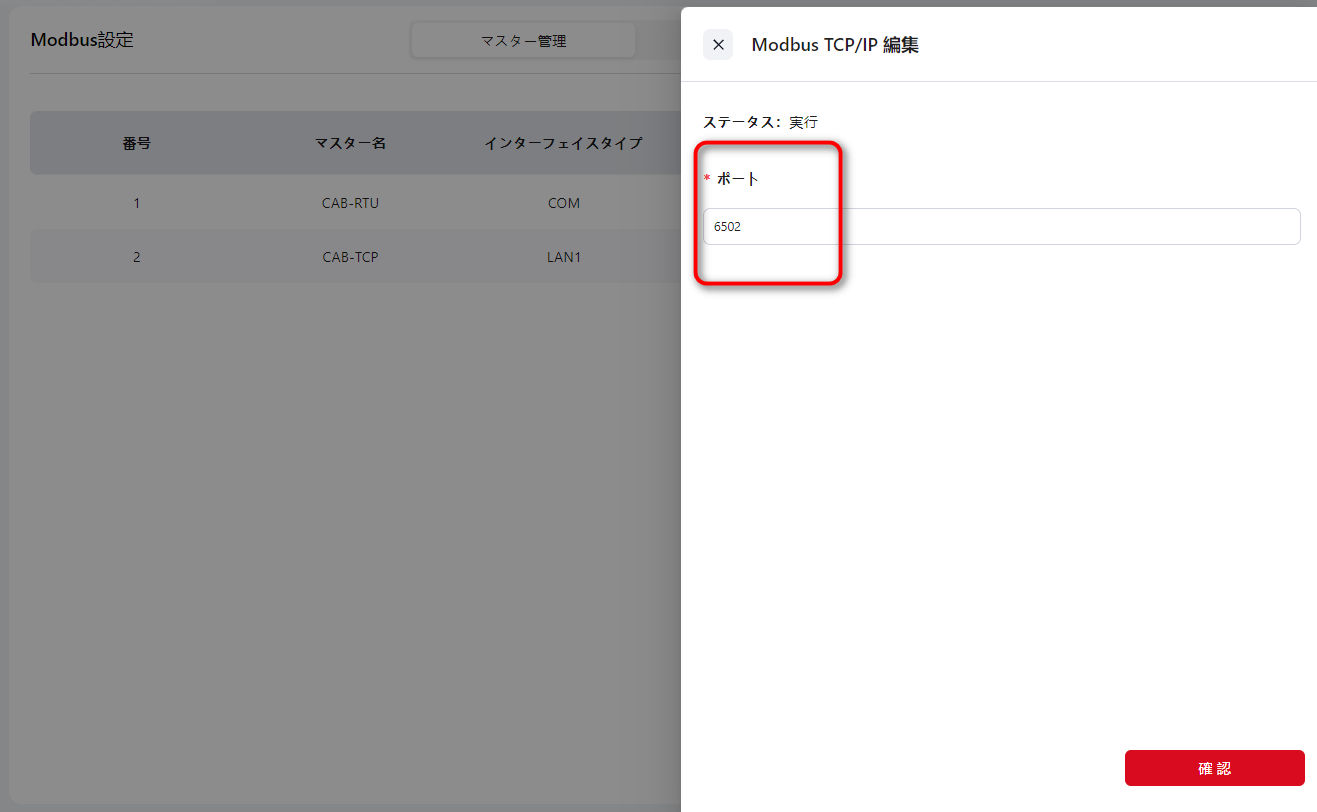
- **
Modbus設定で、マスターステーション管理-CAB-TCPを選択します。編集アイコンをクリックすると、特定の操作ページが表示されます。ポート欄にポート番号(範囲:0~65535、デフォルトポート番号:6502)を入力し、OK**をクリックします。
警告:
一般的に使用されるサービスポート(例えば8080、80など)の使用は避けてください。
- 設定が正常に構成されたら、制御キャビネットの電源を切り、再起動してからロボットを再接続して設定を適用します。
- マスターとの接続が確立した後、Modbusアドレステーブルのレジスタアドレスとファンクションコードに基づいてロボットの状態を読み取ったり、ロボットのI/O信号を制御するプログラムを記述する必要があります。ロボットの状態は
I/Oパネル-Modbusセクションでも確認できます。
センサー設定
JAKAの力制御製品が使用されている場合、このインターフェースで設定できます。
詳細な操作については、JAKA力制御製品ユーザーマニュアルを参照してください。


オプションの力制御製品は、このページで設定できます。詳細な操作については、JAKA力制御製品ユーザーマニュアルを参照してください。
センサー設定
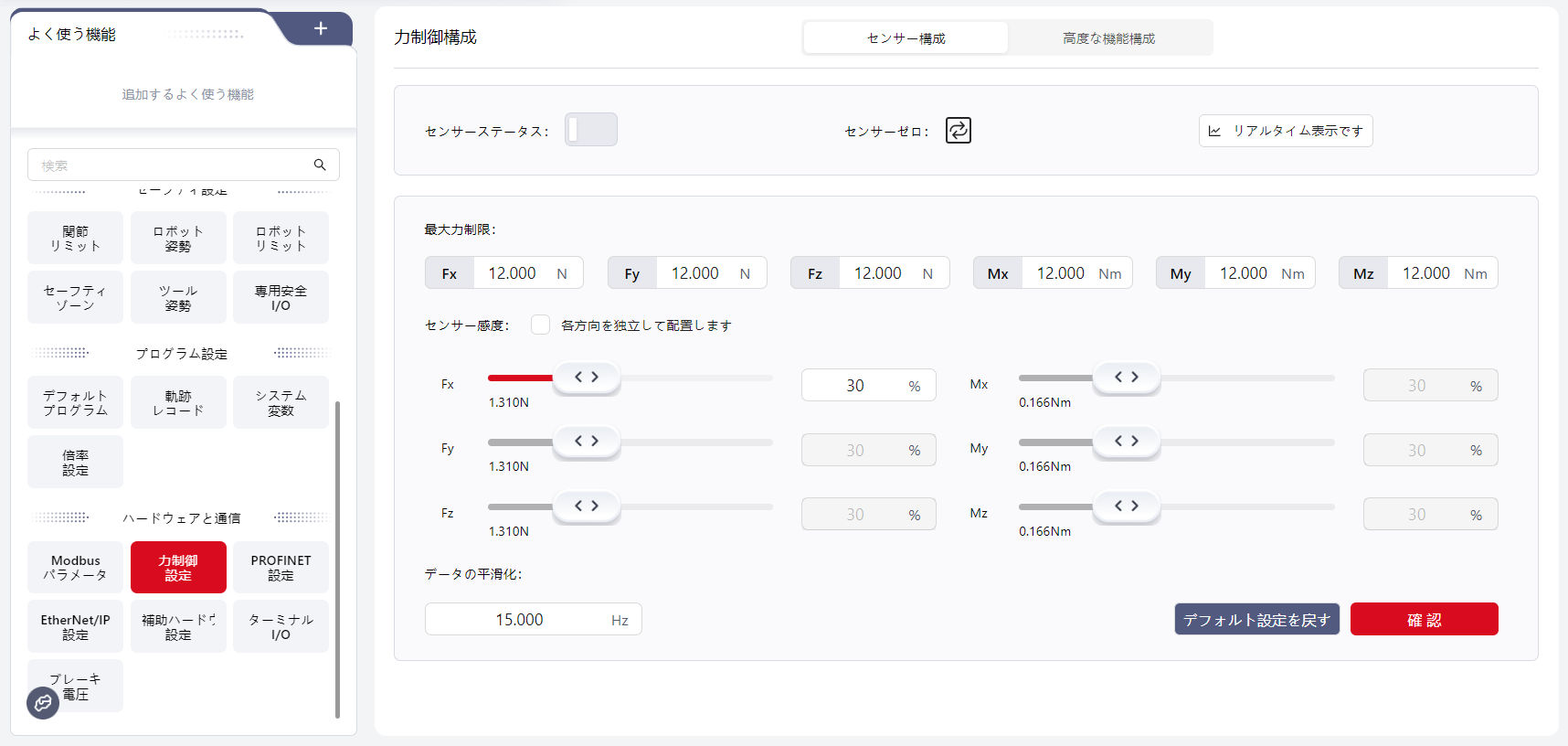
- センサー状態: センサーの状態を表示し、制御します。ロボットが電源オンになると、センサーも自動的に電源オンになります。スイッチがオンのとき、センサーは通常運転しています。手動でスイッチをオフにすると、センサーはオフになります。スイッチがオフのとき、センサーはオフであり、手動でスイッチをオンにすることができます。「編集中」と表示されている場合、システムはバックグラウンドでセンサーを自動的に起動しようとしています。これは、ロボットの起動時または予期しないセンサーの切断後に発生することがあります。自動起動処理には通常4〜6秒かかり、この間はスイッチをクリックできません。センサーの再起動を待ってください。自動起動が失敗した場合は、手動でセンサーをオンにするか、ロボットを再起動してください。センサーが起動しない場合は、JAKAの技術サポートにお問い合わせください。無断で分解や修理はしないでください。
- センサーゼロ調整: アイコンをクリックしてセンサーをゼロに設定します。ロボットのエンドエフェクタが外部力から解放され、ロボットがツールドラッグモードや定常力順応モードにないことを確認してください。使用前にセンサーをゼロ調整することをお勧めします。センサーゼロ調整は、力値表示インターフェースでも行うことができます。
注意:
工場でのオフセットや温度効果により、外部力が加わっていない場合でも、センサーの読み取り値がゼロでないことがあります。20Nまたは2Nm以内の誤差は正常であり、センサーの品質問題を示すものではありません。ゼロ調整後、センサーは正常に動作します。外部力が加わっていないのにセンサーの生読み取り値が20Nまたは2Nmを超える場合、ロボットフランジが取り付けられていない場合は、JAKAの技術サポートに点検を依頼してください。
警告:
センサーゼロ調整は約1秒かかります。この間、ロボットフランジの下の黒いゴムリングには、エンドエフェクタ自体の重さ以外の力を加えないでください。衝突や圧縮、接触などが含まれます。これに従わないと、センサー補償誤差が発生し、ロボットの制御不能な動作や機器の損傷、個人の怪我を引き起こす可能性があります!
設備の取り付け後、ロボットの再起動、故障回復、またはセンサーの長時間使用後には、力制御機能を使用する前に必ずセンサーをゼロ調整してください。これを行わないと、ロボットの制御不能な動作や機器の損傷、個人の怪我を引き起こす可能性があります!
- リアルタイム力表示: ボタンをクリックして、センサーの現在の力データを表示する監視インターフェースに移動します。
- 最大力制限: センサーのX、Y、Z方向の最大力およびトルク制限を設定します。検出された力が設定された制限を超えると、ロボットは直ちに停止し、衝突アラームをトリガーします。センサーがゼロ調整されていない限り、力制限は無効です。力制限の値が0の場合、センサーのデフォルトの最大範囲が自動的に使用されます。センサー範囲の詳細については、JAKA Sシリーズハードウェアユーザーマニュアルを参照してください。
- センサー感度: センサーが検出できる最小の外部力およびトルクを指定します。センサーの読み取り値が設定された感度値を超えると、その超過分が計測された力と見なされます。設定値を下回ると、センサーは外部力に影響されていないと見なされます。センサー感度設定はすべての力制御機能に影響を与えます。たとえば、感度値が小さいと、ツールドラッグモードで必要な力が減少し、最大力制限および終了条件の検出感度が向上し、定常力順応モードでの目標力誤差が減少します。「独立方向設定」を選択すると、各方向ごとに感度を独立して設定できます。そうでない場合、Fx方向のみ設定可能で、他の方向はそれに応じて変更されます。
注意:
センサーは精密な計測コンポーネントであり、外部環境の影響を受けやすく、動作中にわずかなゼロ点ドリフトが発生することがあります。正しいゼロ調整を行った後でも、温度変化やロボットの姿勢調整などの要因により、ゼロ点にわずかな変動(センサー範囲の0.5%以内)が生じることがあります。これにより、外部力が加わっていない状態で非ゼロの読み取り値(約1〜2N)が表示されることがあります。この効果に対抗するために、センサー感度を必要に応じて調整してください。
- データスムージング: 設定された周波数以上の信号をフィルタリングして力値曲線をスムーズにします。0に設定するとスムージングが無効になります。小さい値に設定するとフィルタリングが強化され、力値曲線がスムーズになり、力の変化への感度が低下します。一般的なシナリオでは、20Hzから60Hzの範囲で設定します。この機能は、研削などの外部振動が力の変動を引き起こすタスクに使用されることが多いです。
高度な機能設定

- 力制御速度制限: ツールドラッグモードでTCPの速度を制限します。定常力順応モードでは、ロボットの実際の速度とコマンド速度の差を制限します。実際の速度が制限値に達した場合、ロボットはその速度を維持します。デフォルト: 500mm/s、60°/s。
- トルク基準点: 外部力によって生成されるトルクを計算するための基準点。実際の力が適用される点とこの基準点の間の距離がトルクアームを決定します。これにより、外部力下でのロボットの回転方向や速度、終了条件、最大トルク制限に影響を与えます。オプション: センサー基準点 または TCP(デフォルト: センサー基準点)。
- ハイブリッドドラッグ: 有効にすると、ツールドラッグモード中にロボット本体を直交座標空間で移動させることができます。ツールドラッグ設定はハイブリッドドラッグにも適用されます。ハイブリッドドラッグレベルが高いほど、少ない力で操作できます。デフォルト: 無効。
- ドラッグ特異点警告範囲: ツールドラッグモードで特異点からロボットの距離を警告する範囲。範囲が大きいほど、特異点から遠くても警告が表示されます。デフォルト: 中程度の範囲。
- ドラッグ座標系: ツールドラッグモードでの基準座標系。
- 定常力制御許容範囲: 定常力順応モードで、実際の接触力フィードバックと目標力との間に許容される最大の差。範囲内では、ロボットは目標力に達したと見なし、調整を停止します。デフォルト: 0。
- アプローチ速度制限: 定常力順応モードで、力値がセンサー感度閾値に達する前のTCP実際の速度とコマンド速度の差を制限します。この差が制限値に達した場合、ロボットはその速度を維持します。デフォルト: 10mm/s、1°/s。
- 力制御座標系: ツールドラッグモード以外のすべての力制御機能の基準座標系。
PROFINET 設定
JAKA ロボットは PROFINET 通信プロトコルをサポートしており、PROFINET スレーブとして外部デバイスと接続できます。
制御キャビネットの下部のネットワークポートに接続した後、このページにアクセスして PROFINET 機能を有効にします。有効にした後、設定を適用するために制御キャビネットを再起動する必要があります。PROFINET が有効になると、外部 PLC と通信が可能となり、その I/O 情報は I/O パネル - 固定 I/O セクションに表示されます。
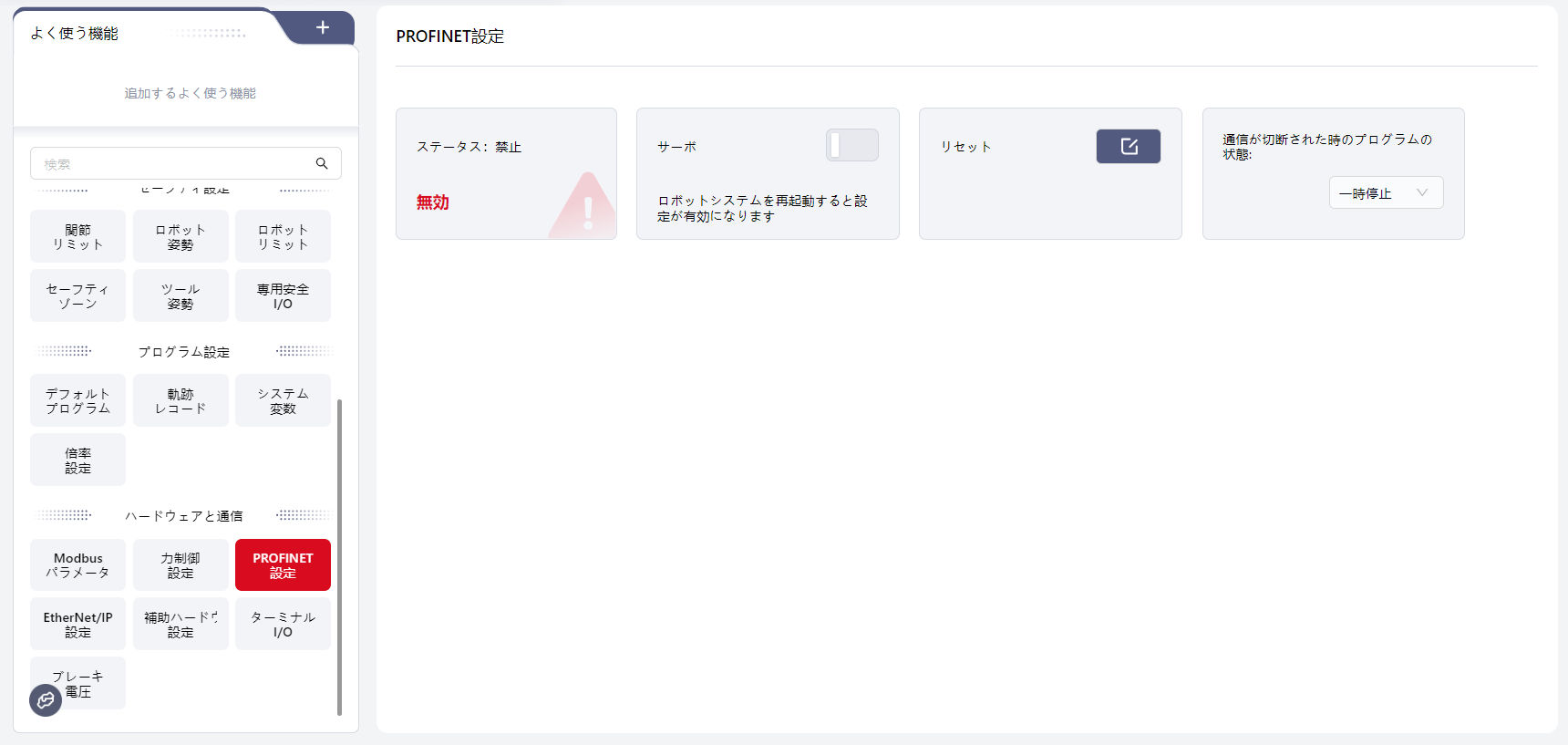
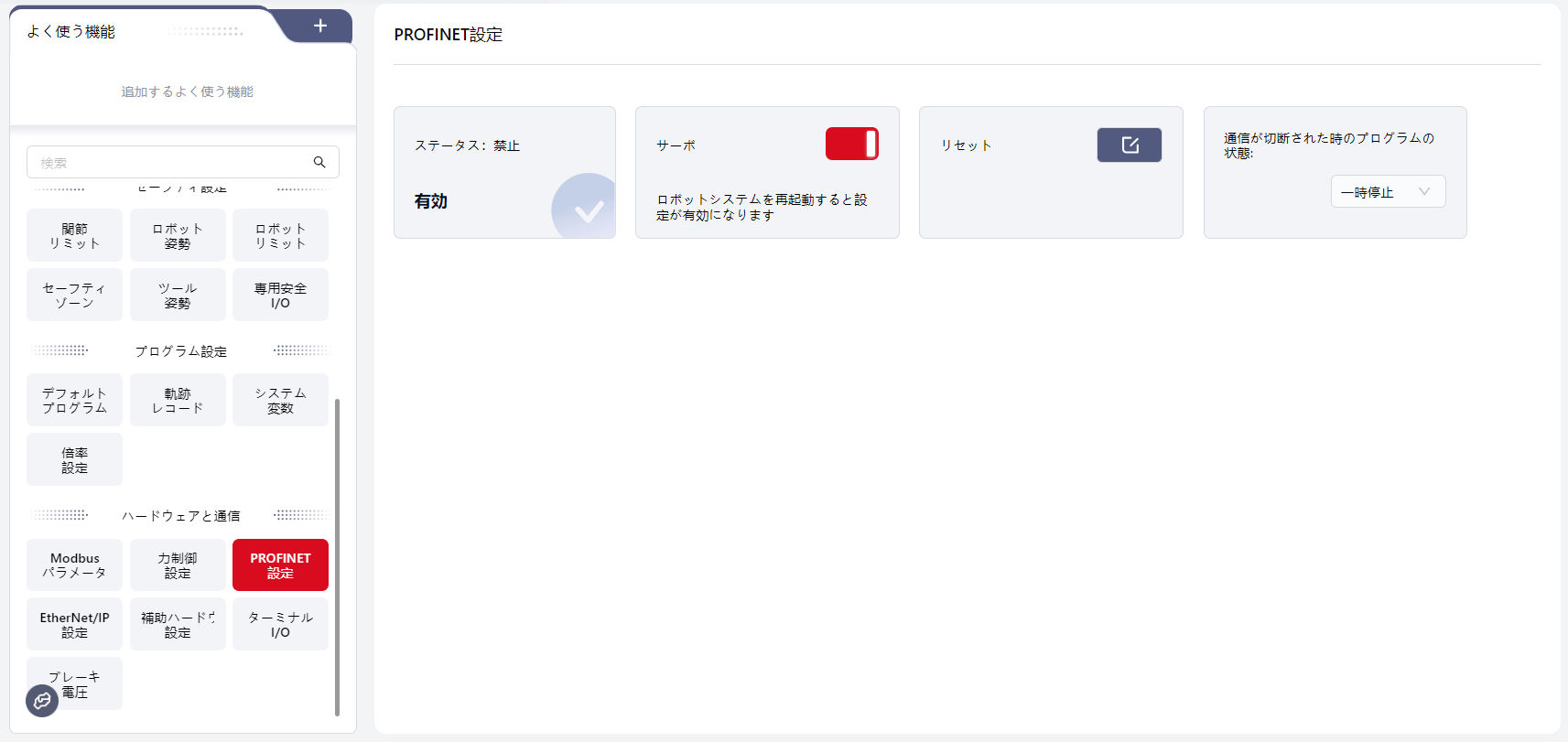
リセット をクリックすると、PLC 側の PROFINET デバイスの通信設定(名前、IP アドレス、有効状態など)が復元されます。

デフォルトの名前は: jaka;
デフォルトの IP アドレスは: 192.168.0.50。
PROFINET I/O の使用詳細については、PROFINET I/O を参照してください。
PROFINET アドレステーブルの詳細については、PROFINET I/O アドレステーブル を参照してください。
バージョン 172 では、通信が中断された場合にプログラムの動作を設定できるオプションが以下の通り提供されています: なし、停止、または再開。
- なし: プログラムは特定のアクションを取らず、現在の状態で実行し続けます。
- 停止: プログラムは一時停止し、通信が復旧した時点から再開します。
- 再開: プログラムは停止し、通信が復旧した時点から最初から再起動します。

バージョン1.7.2では、ファイルを直接ダウンロードできます: 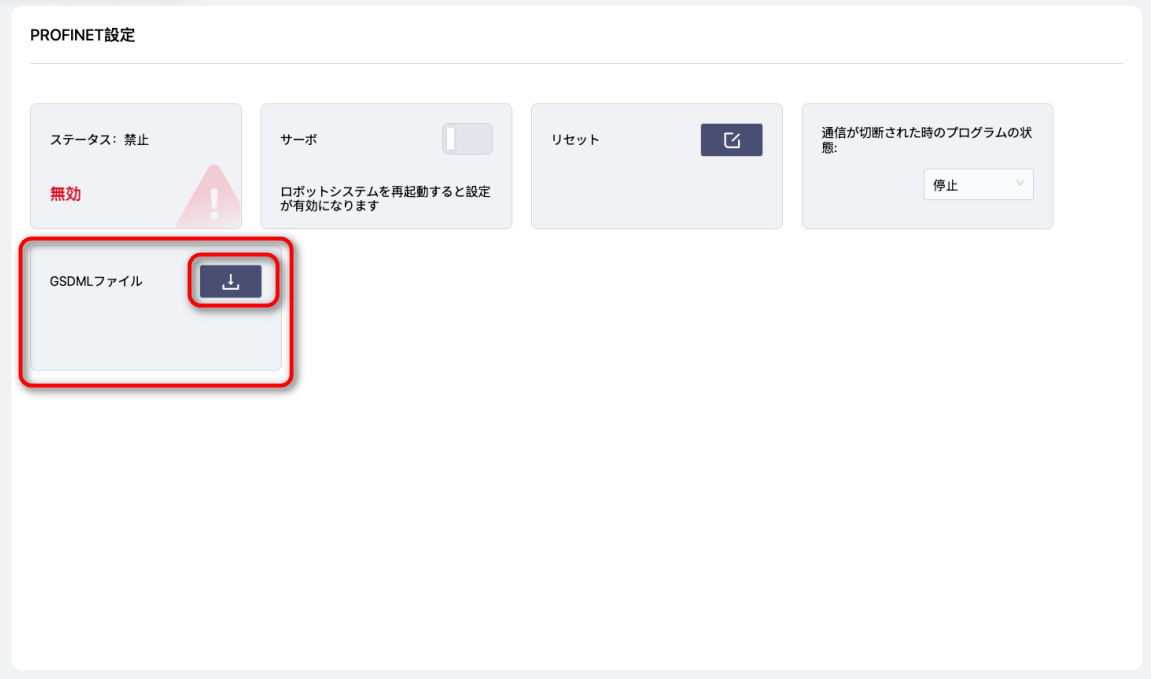
EtherNet/IP 設定
JAKA ロボットは EtherNet/IP 通信プロトコルをサポートしており、EtherNet/IP スレーブとして外部デバイスと接続できます。
制御キャビネットの下部のネットワークポートに接続した後、このページにアクセスして EtherNet/IP 機能を有効にします。有効にした後、設定を適用するために制御キャビネットを再起動する必要があります。EtherNet/IP が有効になると、外部 PLC と通信が可能となり、その I/O 情報は I/O パネル - 固定 I/O セクションに表示されます。

バージョン 172 では、通信が中断された場合にプログラムの動作を設定できるオプションが以下の通り提供されています: なし、停止、または再開。
- なし: プログラムは特定のアクションを取らず、現在の状態で実行し続けます。
- 停止: プログラムは一時停止し、通信が復旧した時点から再開します。
- 再開: プログラムは停止し、通信が復旧した時点から最初から再起動します。

バージョン1.7.2では、ファイルを直接ダウンロードできます: 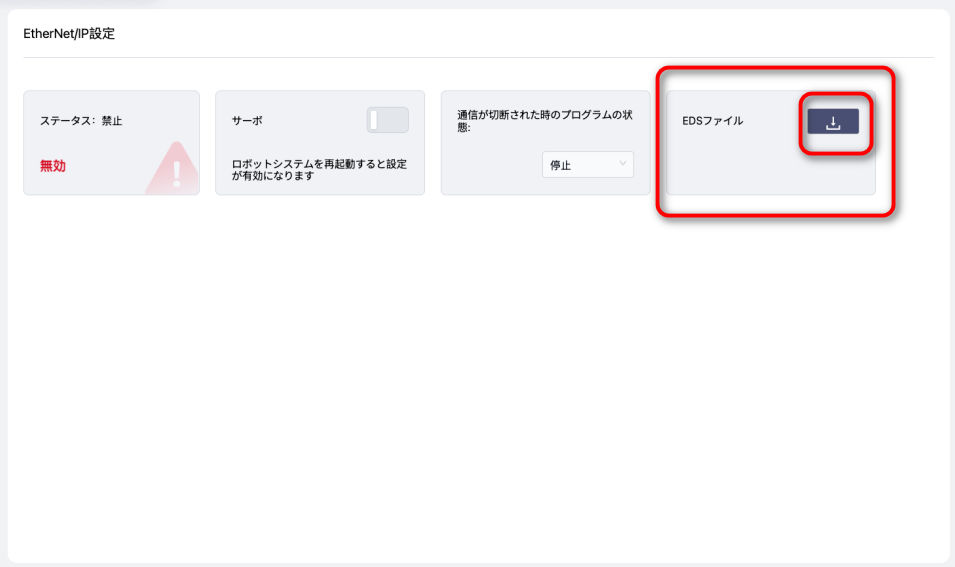
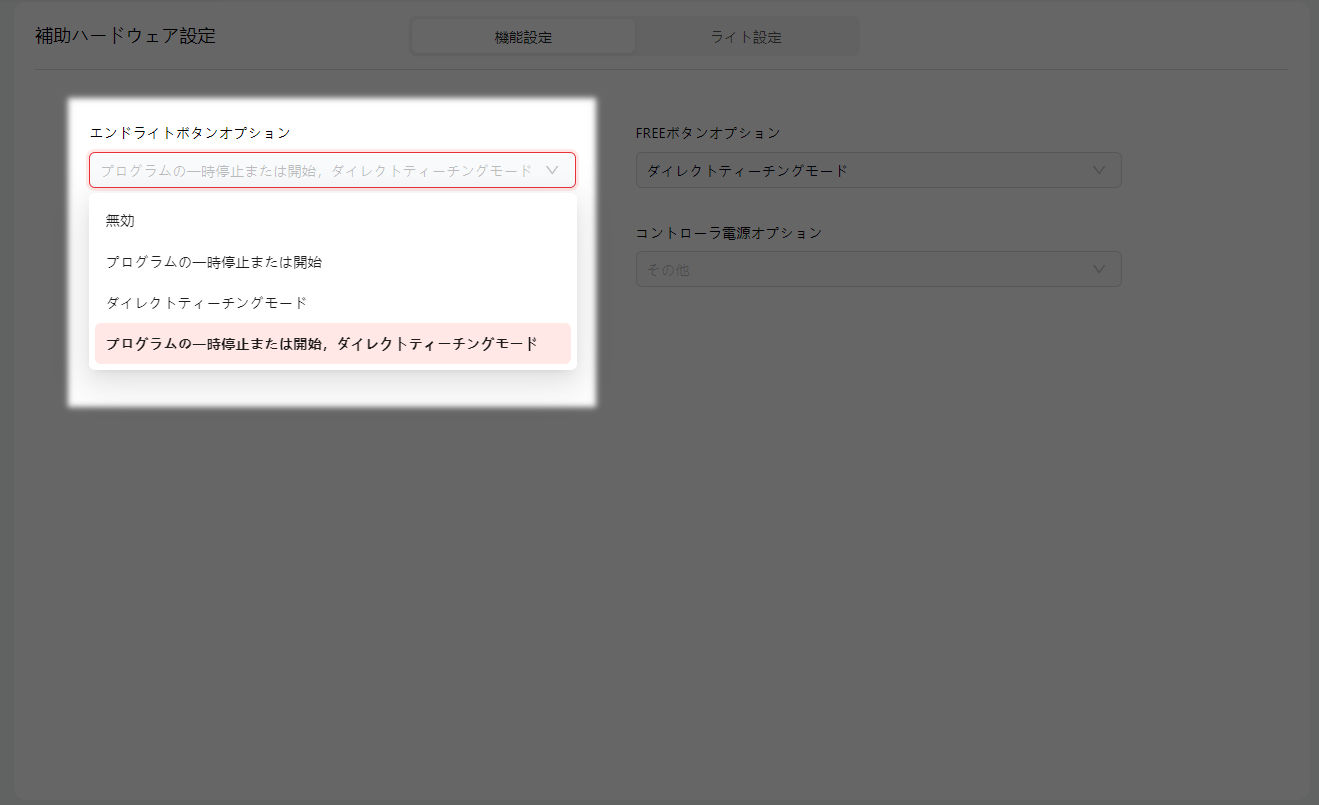
補助ハードウェア設定
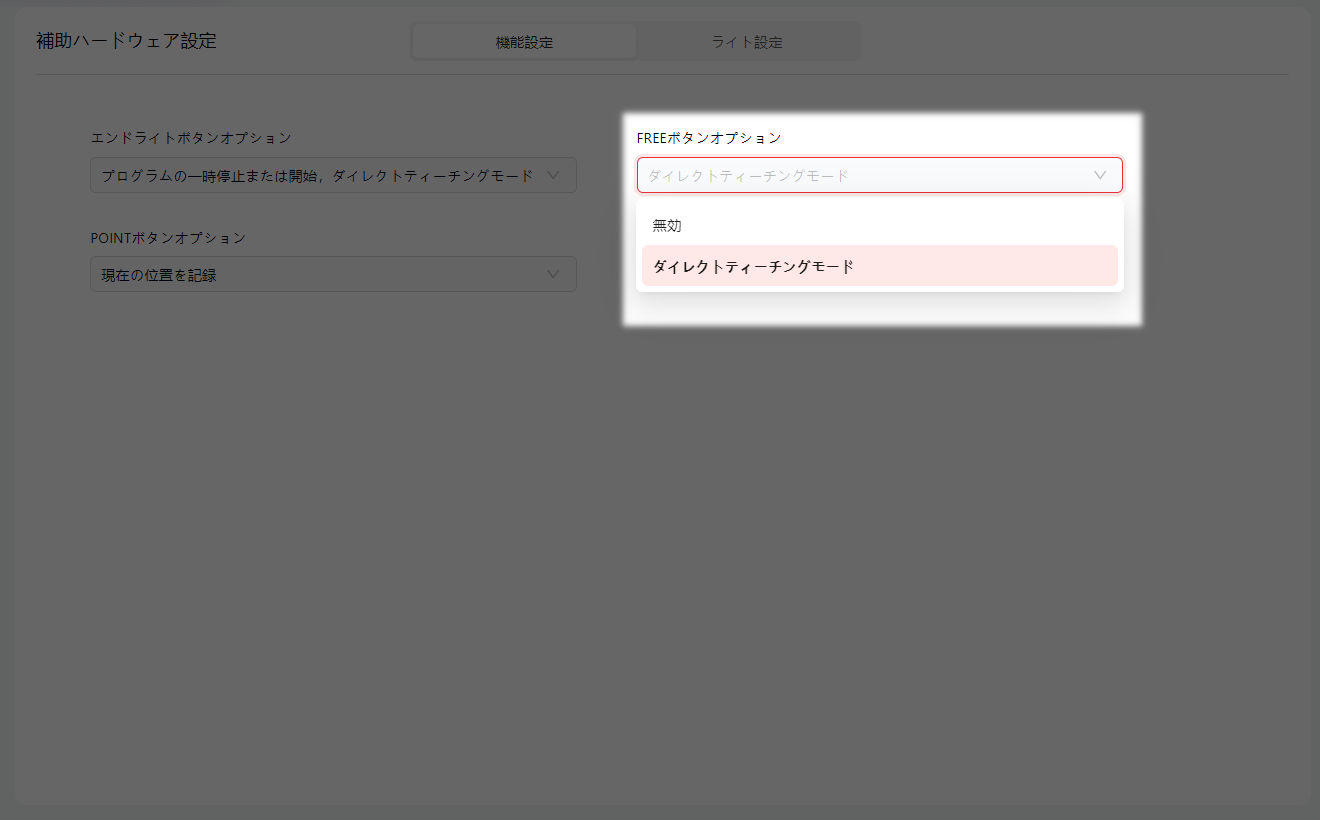
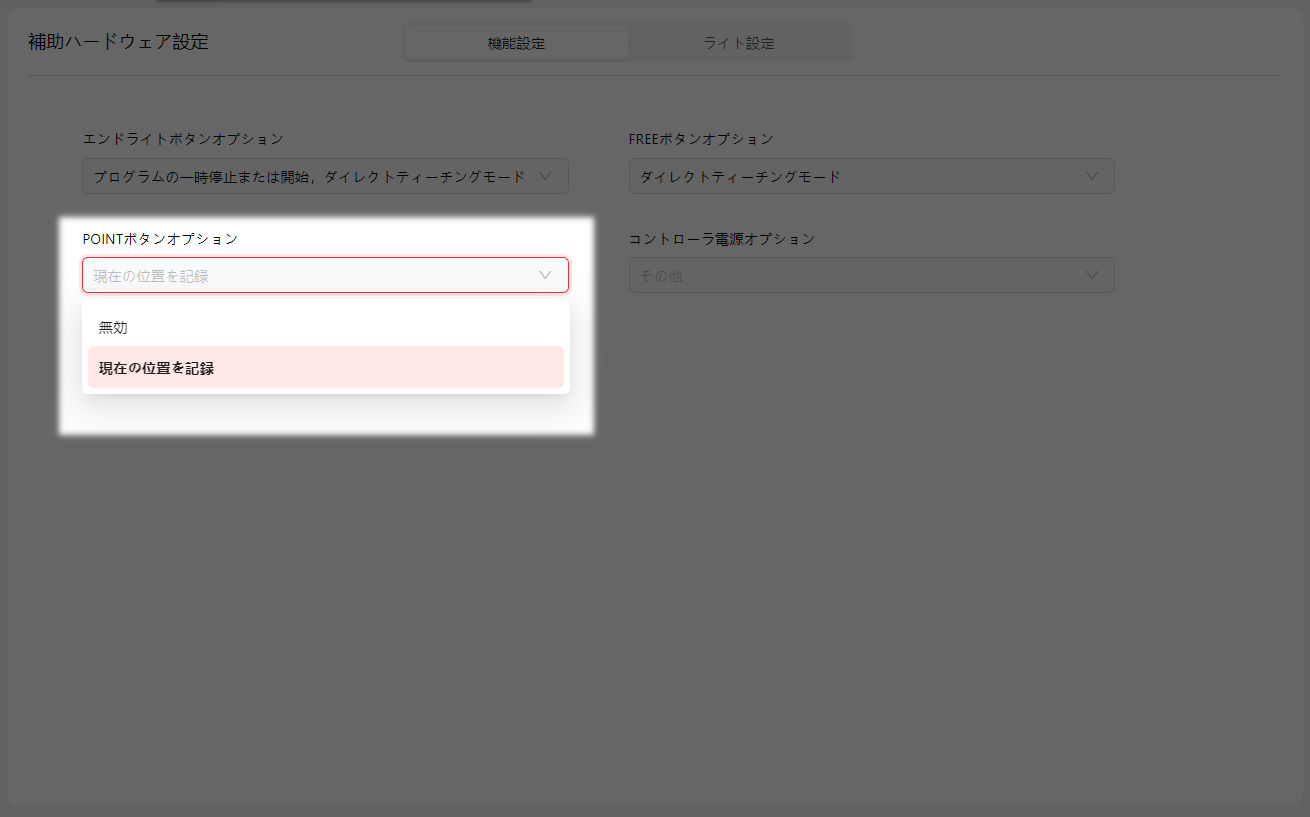
JAKA ロボットのエンドには、次の3つのボタンがあります:エンドエフェクタライトボタンオプション、FREEボタンオプション、POINTボタンオプション。これらのボタンの機能と、制御キャビネットの電源電圧は、このインターフェースで設定できます。

エンドエフェクタライトボタンオプション
FREEボタンオプション
POINTボタンオプション
制御キャビネット電源オプション
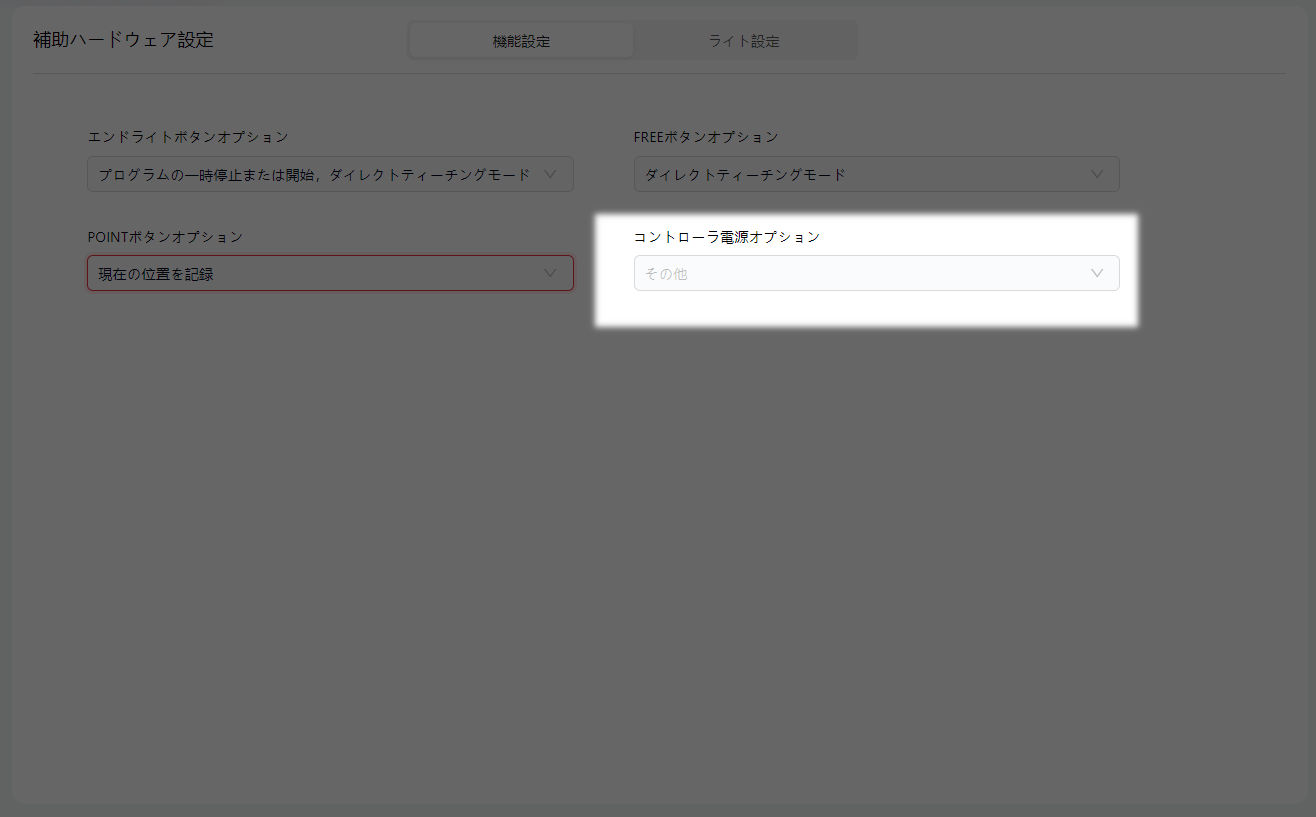
この機能は、制御キャビネットの電源電圧を設定するために使用されます。制御キャビネットの電源環境が220VACでない場合は、電源オプションを調整する必要があります。SCB バージョンは、バージョン 02_57 以上が必要です。
注記:
機能を無効にすると、それはオフになることを意味します。デフォルトでは、機能は有効です。
FREEボタンを長押しすると、ドラッグモードに入ります。FREEボタンを押して離すことで、プログラムを一時停止または開始したり、現在の位置を記録したりできます。プログラムが一時停止中または実行中の場合、ロボットはドラッグモードに入ることができません。
エンドエフェクタライトボタンオプションが無効でない場合、衝突後に衝突アラームをクリアするために押すことができます。
バージョン 172 では、このインターフェースは 機能設定 と ライト設定 の2つの設定に分かれています。

機能設定: 機能と設定方法は前のバージョンと同じですが、Sシリーズロボットを使用している場合は、Sシリーズ専用の特定の機能をここで設定できます。
ライト設定: このページでは、ロボットのエンドエフェクターの呼吸ライトの色を設定し、ロボットの状態を示すことができます:

違い:
- ライトが
点滅の場合、明るさは急速に強く変化します。 - ライトが
呼吸の場合、明るさはゆっくりと滑らかに変化します。
ターミナルI/O
警告:
この機能はTIOバージョン3にのみ適用されます。
ロボットのエンドには、小型のI/Oインターフェース(TIO)が搭載されており、2つのデジタル入力、2つのデジタル出力、2つのアナログ入力をサポートしています。2つのデジタル出力は、高速RS485チャネルとして再利用でき、2つのアナログ入力は、低速RS485チャネルとして再利用できます。さらに、外部の拡張デバイスに電力を供給するための構成可能な電圧出力(12V/24V/OFF)もサポートしています。

エンドツールを接続した後、ロボットが電源オンかつ無効の状態のときに、I/Oパネル - 固定I/O - ツール側 セクションで設定を行う必要があります。
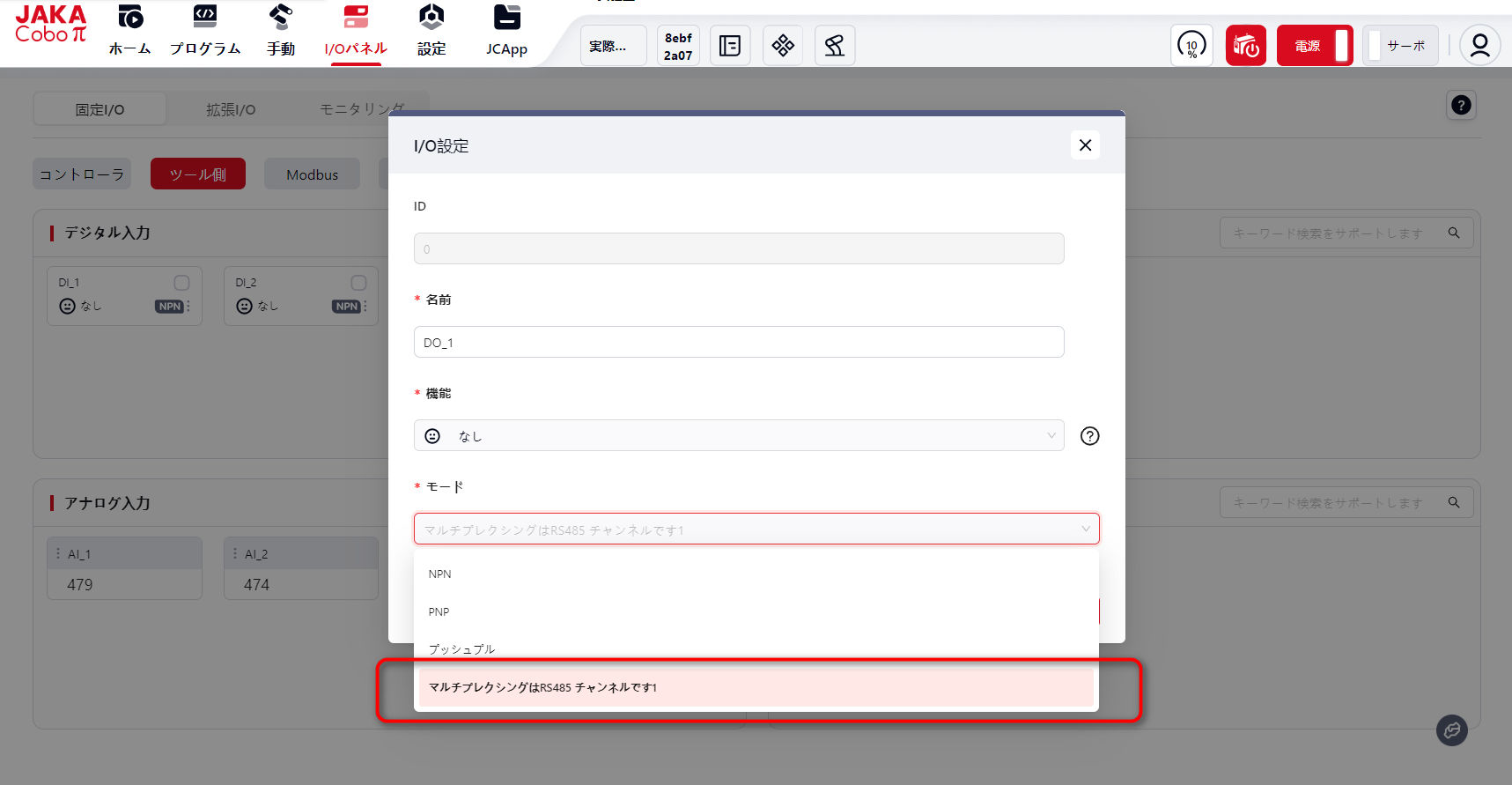
デジタル出力 で、DOを選択し、その機能を RS485チャネル1として再設定 に設定してから、確認 をクリックします。
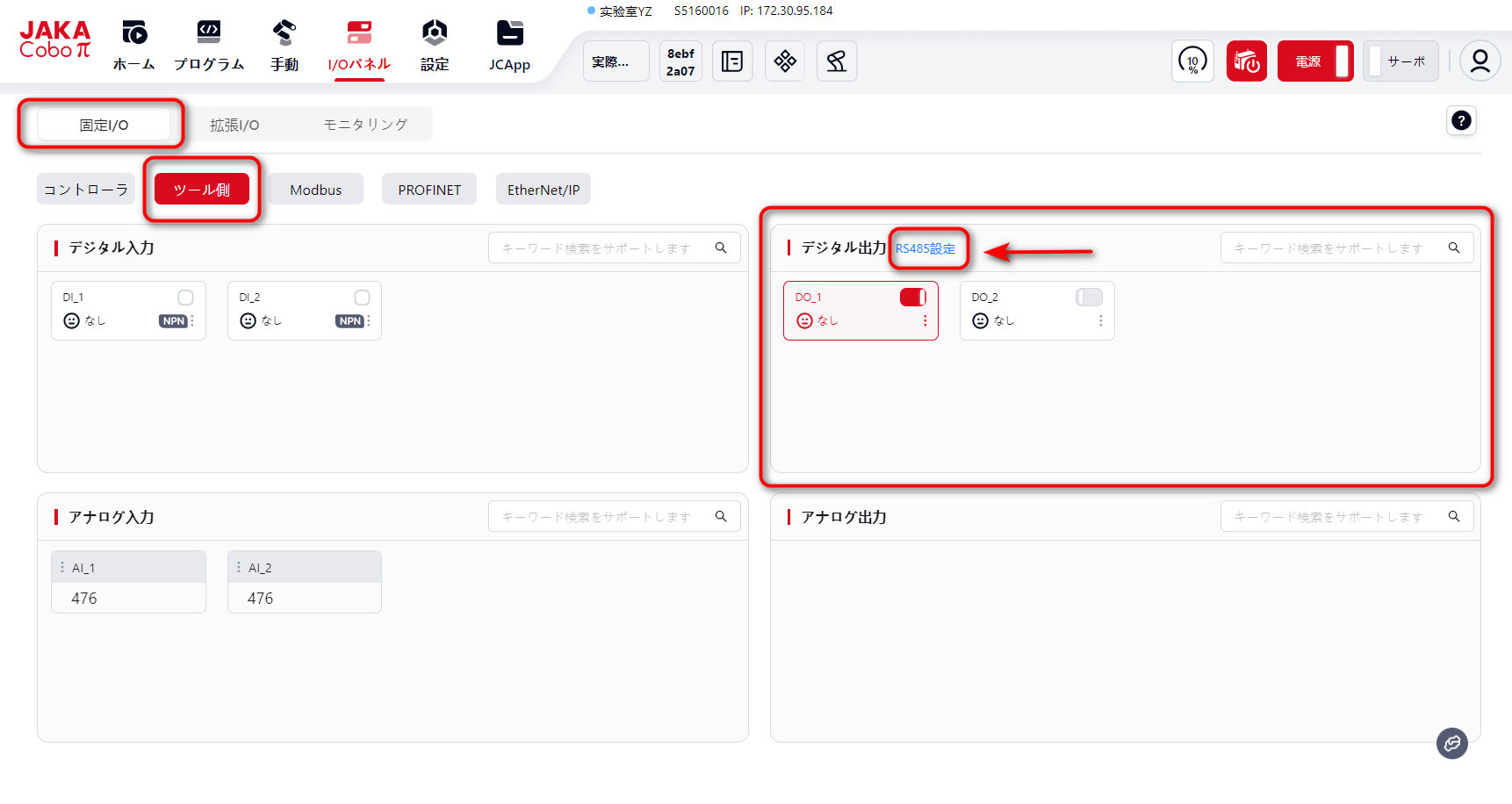
設定が完了すると、RS485チャネル1として再設定 ボタンが表示され、RS485チャネルの設定インターフェースにアクセスできます。
RS485の設定モードには以下の3つがあります:
- Modbus RTU

主に、外部デバイス(例:グリッパー)との通信に使用されます。
現在、Modbus RTU通信をサポートするグリッパーのみがサポートされています。グリッパーをTIOターミナルに接続する前に、ターミナルコネクタの定義を理解し、正しい配線を確認してください。
配線に関する指示は、各モデルのハードウェアユーザーマニュアルを参照してください。
- RS485透過伝送

現在、この機能をサポートするデバイスはありません。今後のアップグレードで利用可能になる予定です。
- トルクセンサーモード
主に、VIモデルのトルクセンサーの接続に使用されます。
警告:
現在、トルクセンサーはRS485チャネル1のみをサポートしています。
パラメータ設定:
- ボーレート:最大230400までサポート
- データビット:8、9をサポート
- ストップビット:1、2をサポート
- パリティ:Odd、Even、Noneをサポート
通信パラメータが正しく設定されていないと、TIOは外部デバイスと正常に通信できません。
セマフォ
TIOのDOまたはAIがModbus RTUモードに設定されている場合、ここでModbusデバイスのセマフォステータス読み取りパラメータを設定できます。その後、対応するセマフォのステータスは、更新またはクエリを行うことで取得できます。

セマフォの意味は以下の通りです:
- セマフォ識別子:セマフォの一意の識別子(Unicodeや特殊文字はサポートされていません)。これは、更新、取得、削除に使用されます。
- RS485チャネル:TIOのRS485チャネルを指定します。RS485チャネル1またはRS485チャネル2をセマフォのソースとして指定します。
- セマフォタイプ:このパラメータは、Modbusの機能コードに対応します。01はコイルレジスタ、02はディスクリート入力、03はホールディングレジスタの読み取り、04は入力レジスタの読み取りです。現在、その他のコードはサポートされていません。
- レジスタアドレス:セマフォに対応するModbusレジスタのアドレス。これは10進数で表されます。このアドレスとRS485チャネルの設定、信号タイプを組み合わせることで、Modbus RTUスレーブの指定されたレジスタにアクセスできます。
- セマフォの更新およびクエリ:
- セマフォを定義すると、デバッグインターフェースでデバッグまたは監視するか、操作プログラムで直接使用できます。どちらの方法でも、セマフォを更新およびクエリするインターフェースが提供されます。更新操作は、コントローラとTIOグリッパー間のデータやり取りをトリガーします。コントローラと外部TIOデバイス間のやり取りは非同期であるため、更新後に一定の時間(100ms)を待って、更新された値が取得されることを確認することが推奨されます。
- 更新レートは設定できます。周波数が0の場合、1回だけ更新されます。周波数が0より大きい場合、通信帯域幅に基づいてできるだけ頻繁に更新されます。信号が1セットしかない場合、最高の更新レートはデフォルトで20となります。セマフォが複数セット存在する場合、すべてのセマフォの更新レートを5未満に減らしてください。
注意:
セマフォの定義は、TIOのI/OピンがRS485チャネルとして再利用され、Modbus RTUモードに設定された後に完了する必要があります。モードやピンの再利用設定を変更すると、現在のセマフォ設定は失われます。
電圧出力
ツール端末TIOには端末電力出力機能があり、ユーザーは電圧出力の有無を選択し、出力電圧を12Vまたは24Vに設定できます。

デバッグ
デバッグインターフェースは、即時コマンドを送信するために使用されます。これらのコマンドは、TIO外部グリッパーをリアルタイムで制御します。制御項目には位置制御、速度制御、力制御があります。
即時コマンドを送信する手順:
- チャネルとタイプを選択します。
- データコマンドを16進数または8進数で入力します。
- 「確認」ボタンをクリックします。
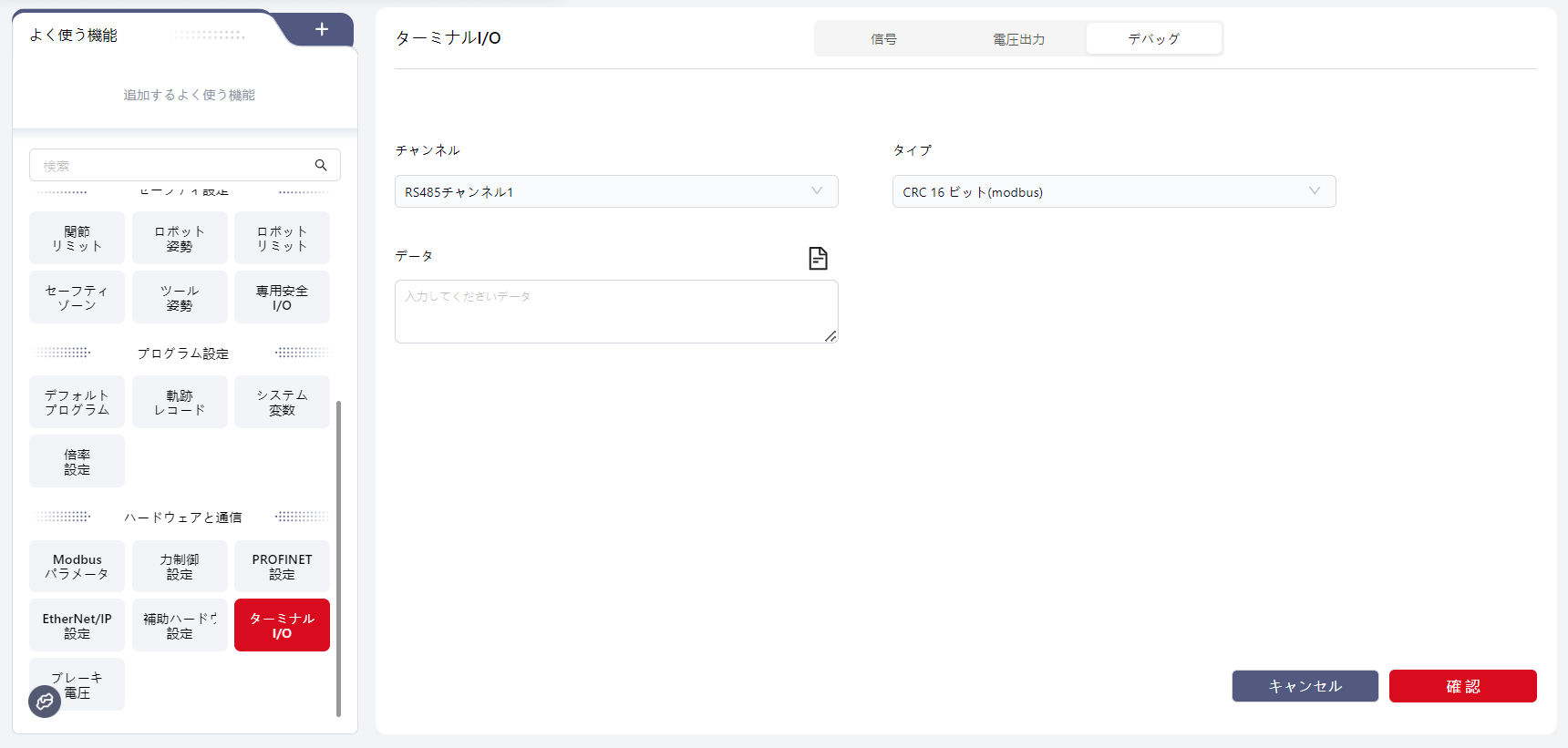
注意:
データテキストボックスに即時コマンドデータを入力する際は、コマンドデータのみを記入する必要があります。CRCチェック値は制御システムによって自動的に追加されます。
ヒント:
プログラミングインターフェースの通信コマンドは、セマフォの更新およびクエリをサポートしています。
セマフォの定義、変更、削除は「デバッグ」インターフェースで手動で追加する必要があります。
さらに、即時コマンド送信コマンドは、外部デバイスをリアルタイムで制御するために提供されています。
プログラミングインターフェースの「ヘルプ」ボタンをクリックしてコマンドの説明を表示するか、こちらで説明を確認できます。
ブレーキ電圧
警告:
この機能はMiniCabにのみ適用されます。
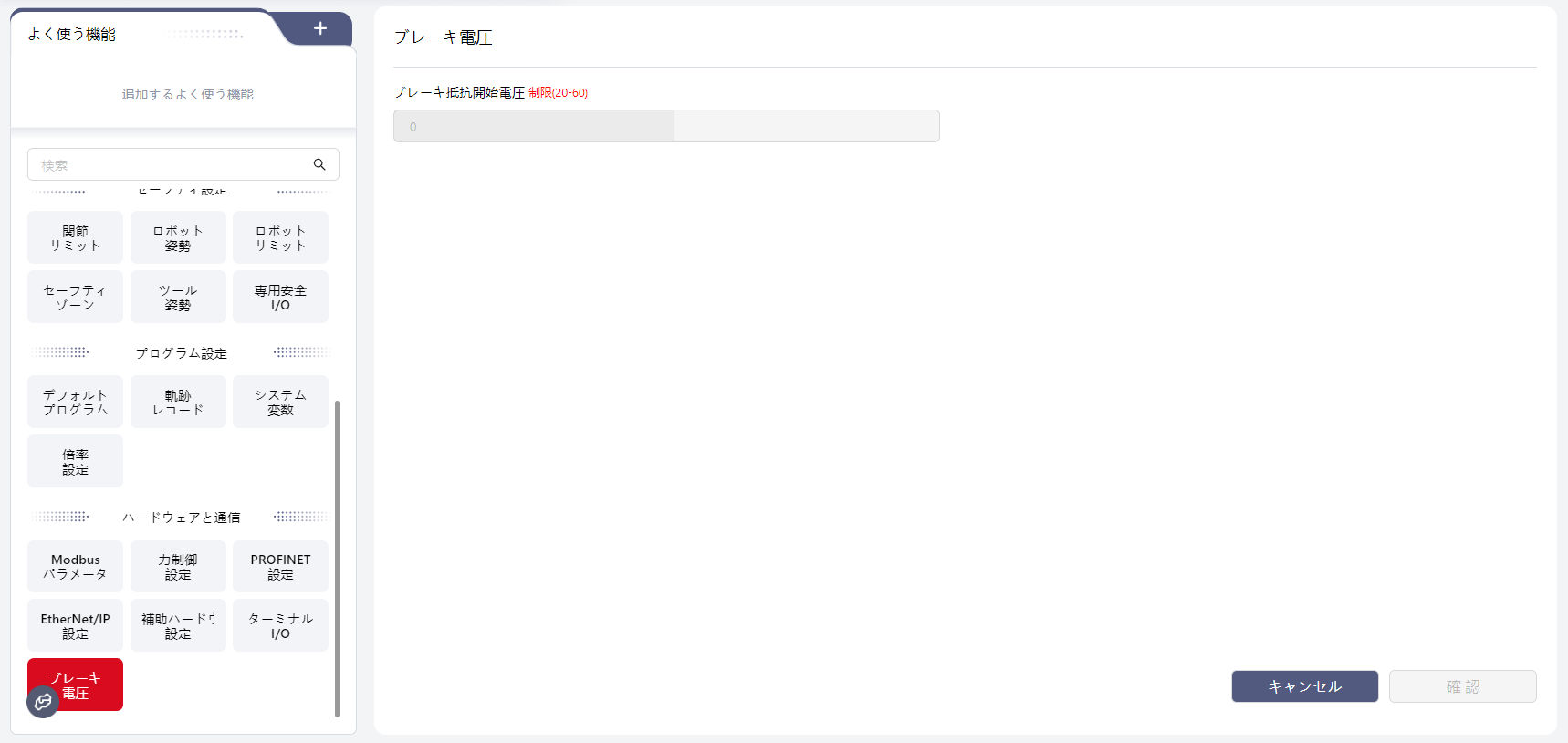
MiniCabには、ロボットの減速およびブレーキ時に発生する起電力を分散させるための電圧ブレーキ回路が統合されています。外部電源を使用する場合、MiniCabのブレーキ電圧を設定する必要があります。設定を行わないと、過電圧保護によるシャットダウンやコントローラーの損傷が発生する恐れがあります。
ブレーキ電圧を設定するにはロボットの電源をオフにする必要があります。
ブレーキ電圧(V-Brake)と入力電圧(V-IN)の関係は、V-Brake ≥ (V-IN + 3)V です。以下の表は、一般的な入力電圧タイプに基づいた推奨設定値と対応する電源タイプを示しています:
| 電源タイプ | 入力電圧 V-In[1] | ブレーキ抵抗作動電圧 V-Brake V-Brake[2] |
|---|---|---|
| 48Vモジュール電源 | 48V | 51V |
| 48Vリチウムバッテリー | 54.6V | 58V |
| 24Vモジュール電源[3] | 24V | 27V |