プログラミング
プログラミング
インターフェース概要
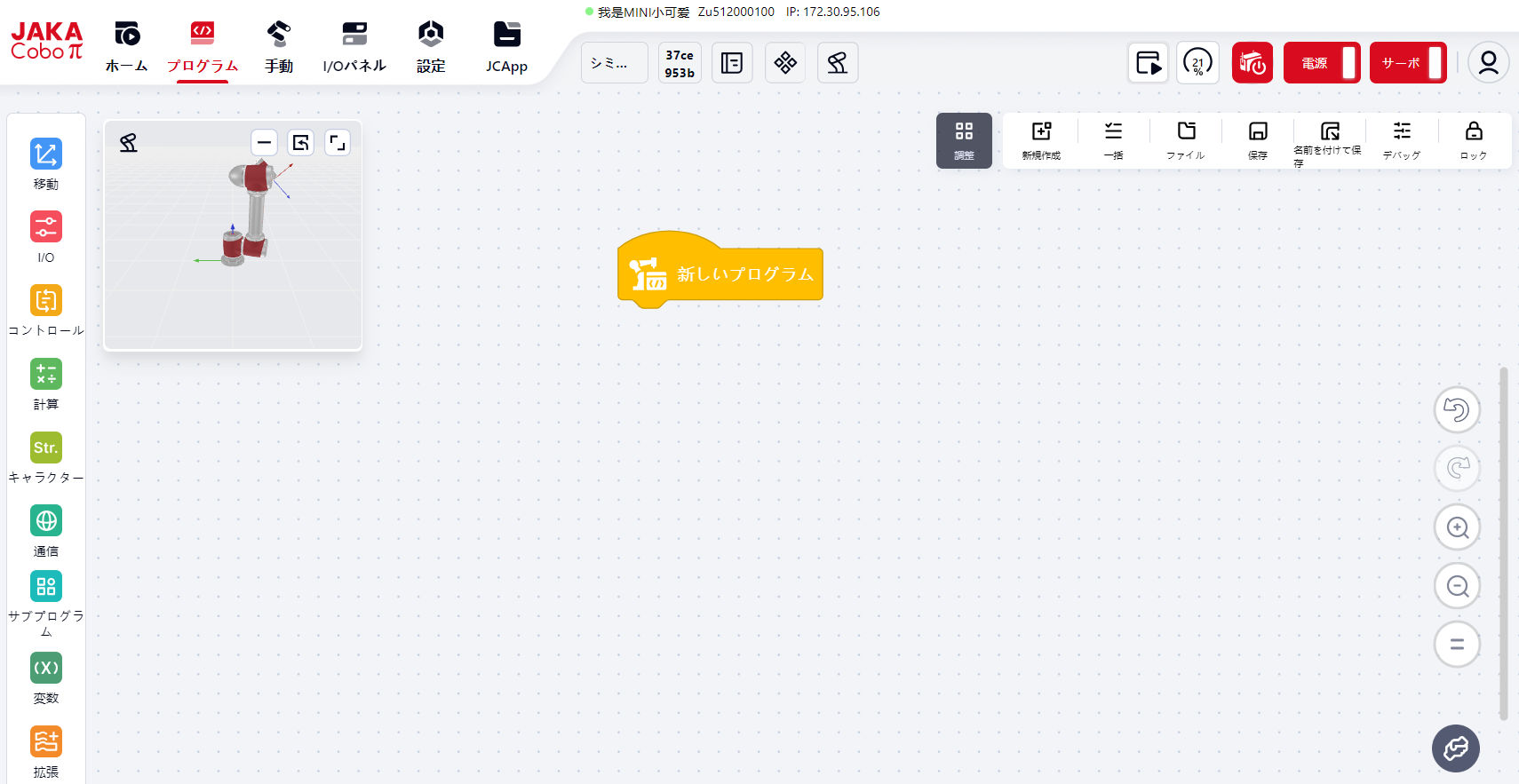
図に示すように、プログラミングインターフェースはいくつかの機能エリアに分かれており、以下で詳細に説明します。
共通機能概要
コマンドリスト
各コマンドの詳細な説明は後述します。
シミュレーションモデルエリア
シミュレーションモデルエリアでは、ロボットのリアルタイム動作を確認できます。
デフォルトでは、このウィンドウはプログラミングページの左上隅に浮かんでいます。ウィンドウは必要に応じてドラッグして再配置できます。
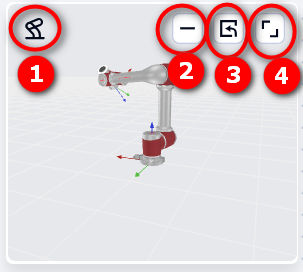
ヒント
1 ロボットボタン:ダブルクリックでウィンドウを最大化します。
2 最小化ボタン:クリックするとウィンドウが最小化され、ページ左上に浮かびます。再度クリックで元のサイズに戻ります。
3 デフォルト状態復元ボタン:クリックでウィンドウをデフォルトのサイズと位置に戻します。
4 最大化ボタン:クリックでウィンドウを最大化します。
- マウスカーソルをウィンドウ内でホバーし、スクロールすることでビューを拡大/縮小できます。
コマンド操作エリア
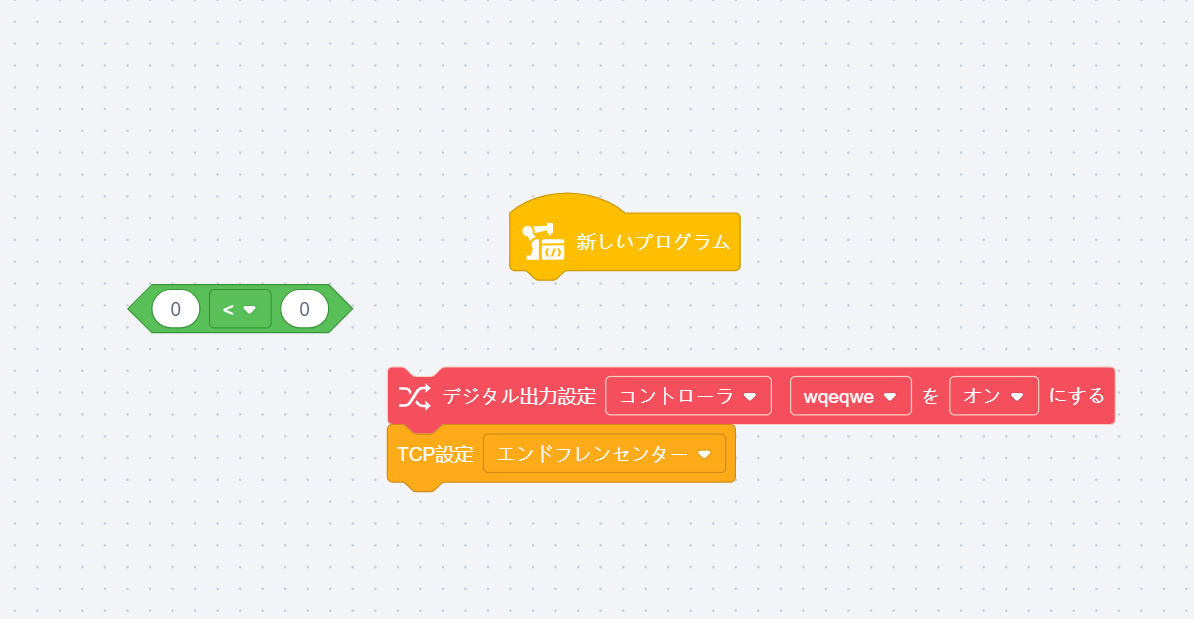
コマンド操作エリアには、他の機能ボタン以外のすべての領域が含まれます。このエリアでは、コマンドを組み合わせることができます。
- 単一のコマンドをクリックすると、ポップアップウィンドウが開き、さらなる操作が可能になります。

- キャンバスの空白部分をクリックすると、ポップアップウィンドウが開き、さらなる操作が可能になります。

- コマンドをドラッグすると、操作エリアの下部にゴミ箱アイコンが表示されます。このアイコンにコマンドをドラッグすると削除できます。

バージョン172では、新たに「コメントを追加」機能が追加され、その他の機能はバージョン171と同じです。したがって、「コメントを追加」機能のみ詳細に説明します。
- キャンバスの空白部分をクリックしてコメントを追加:

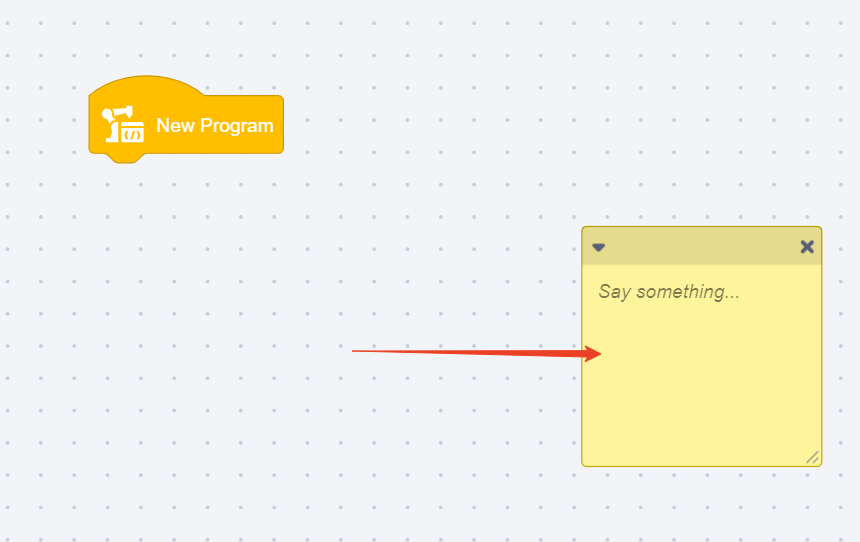
コメントボックスはマウスを使ってキャンバス上の任意の位置にドラッグできます。
- 特定コマンドをクリックしてコメント追加:
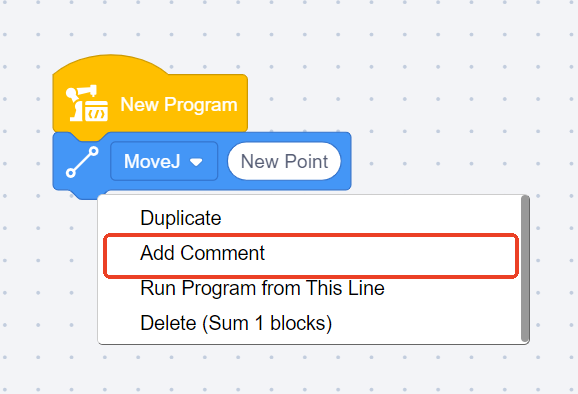
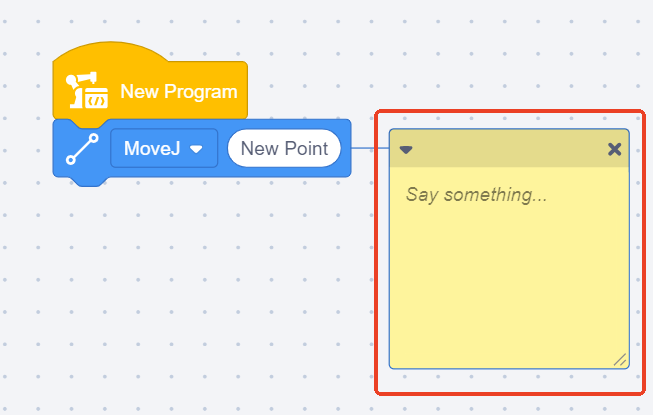
コメントボックスはマウスを使ってキャンバス上の任意の位置にドラッグできます。
調整ボタン

このボタンをクリックすると、ポップアップウィンドウが開き、さらなる操作が可能になります。
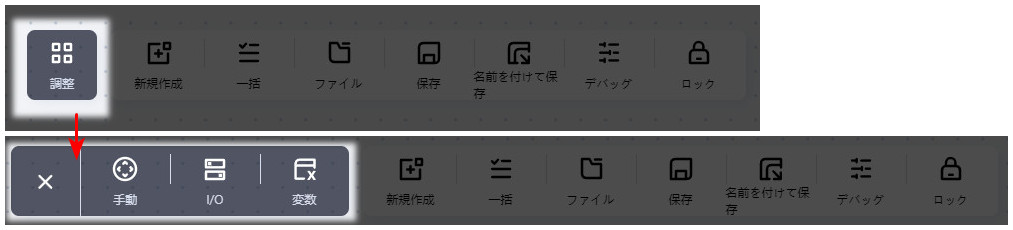
手動
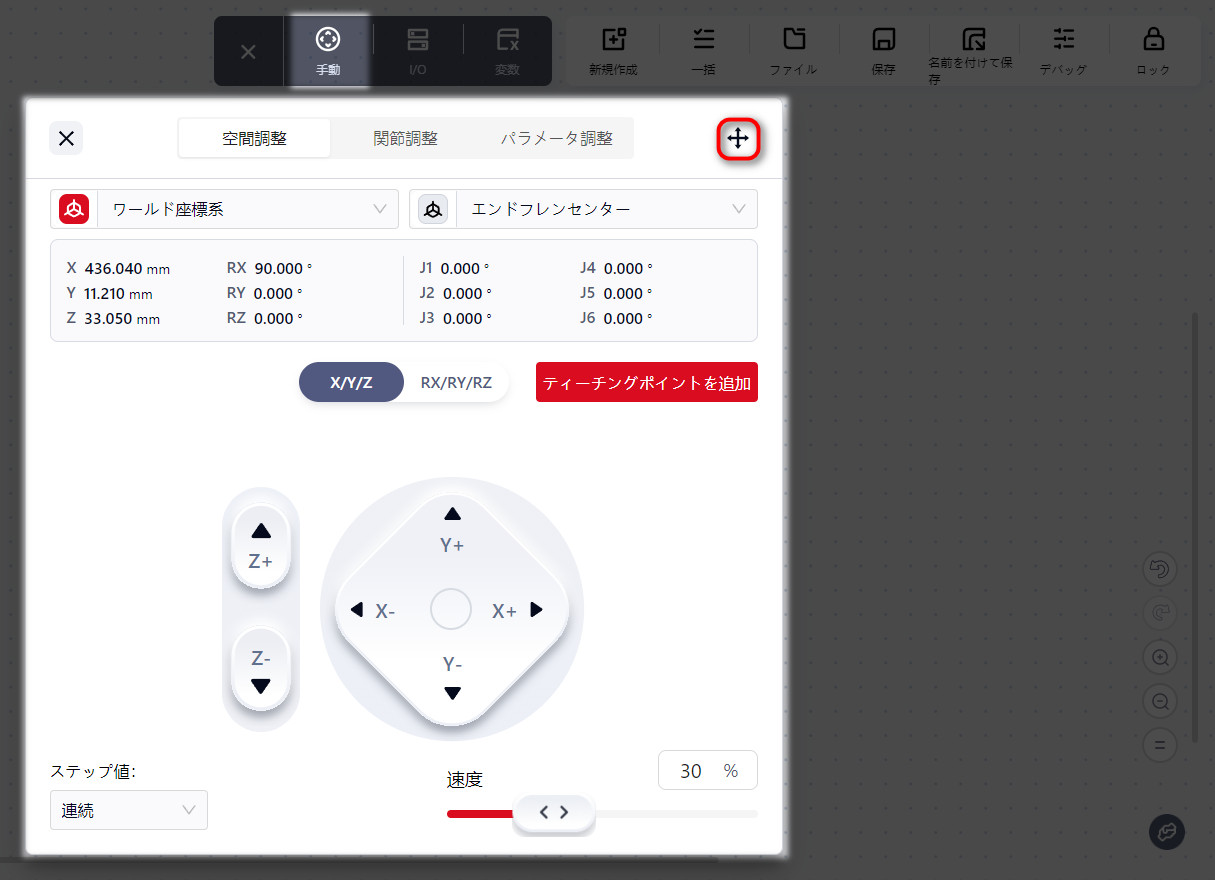
操作は、上部ナビゲーションバーの手動と同じです。
右上隅のボタンを使うことで、このウィンドウをページ上の任意の位置に自由に移動できます。
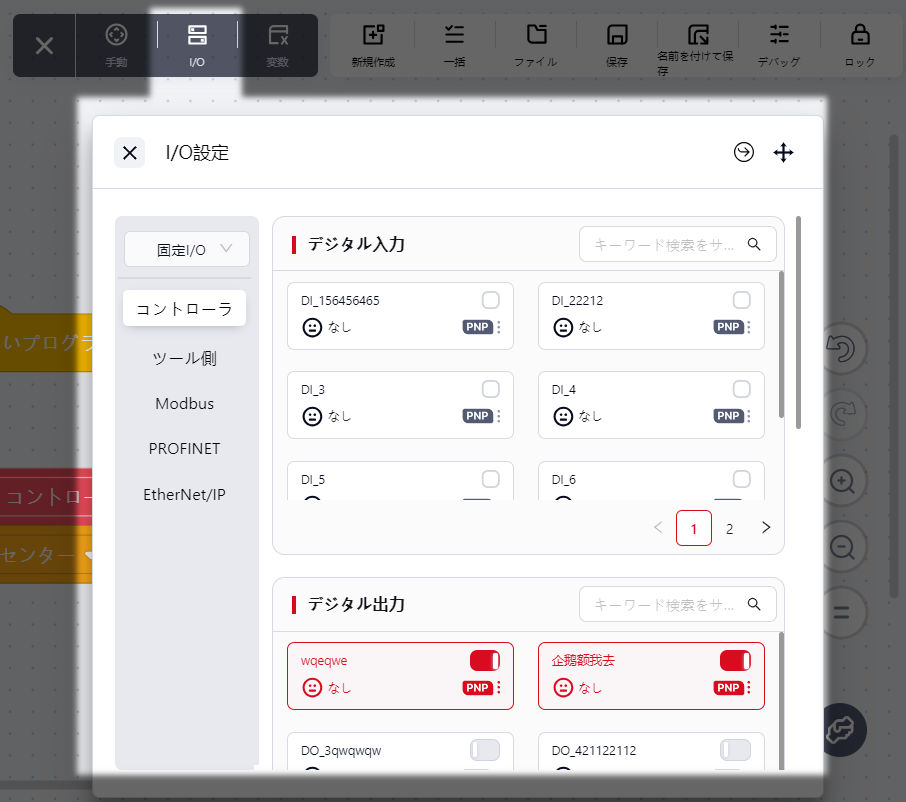
I/O
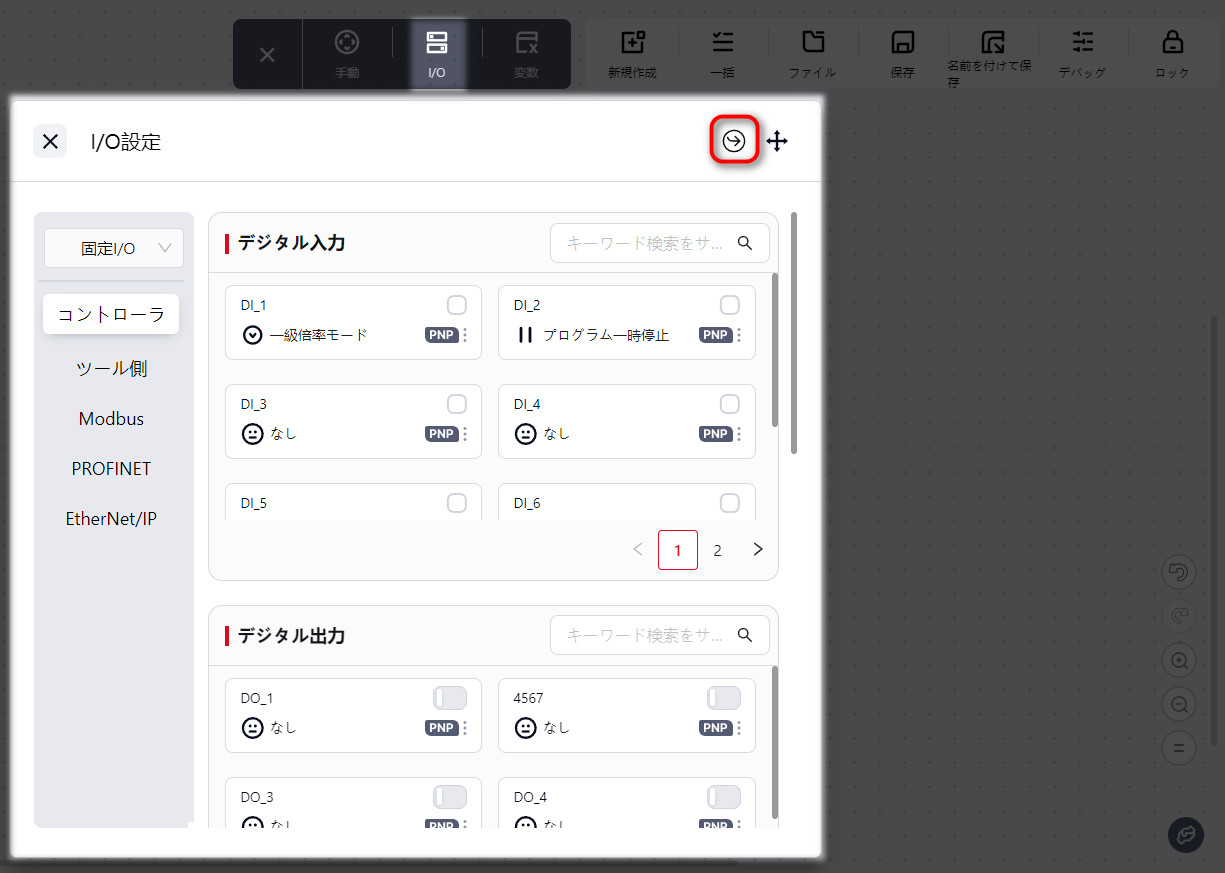
「操作は、上部ナビゲーションバーのI/O パネルと同じです。
右上隅のボタンをクリックすると、設定 - Modbus 設定ページにジャンプします。
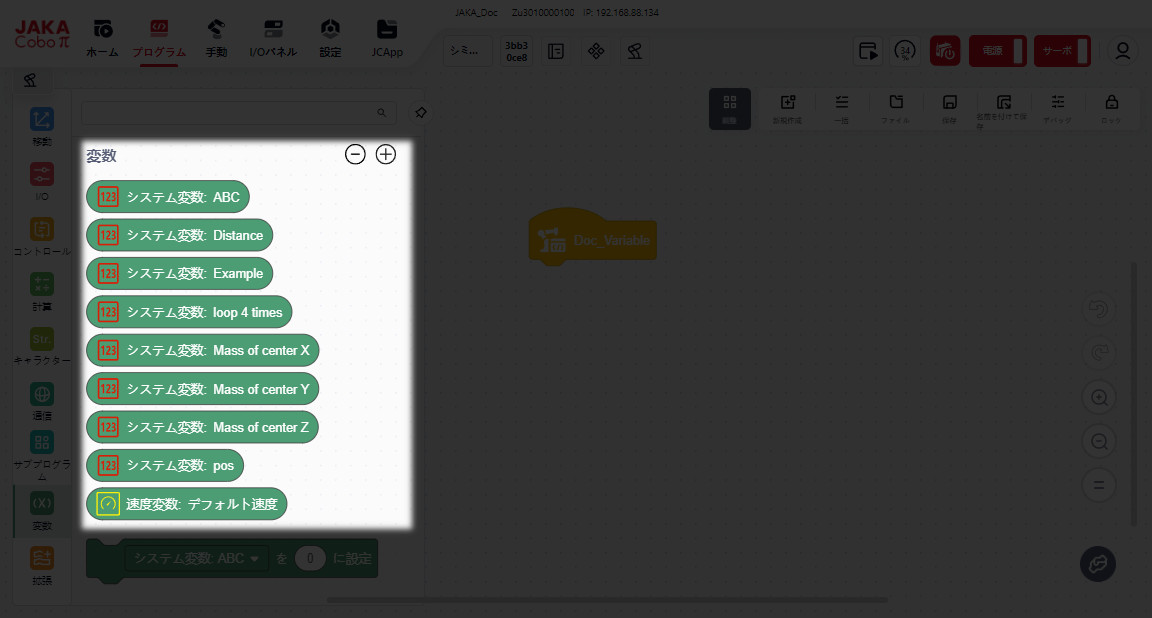
変数
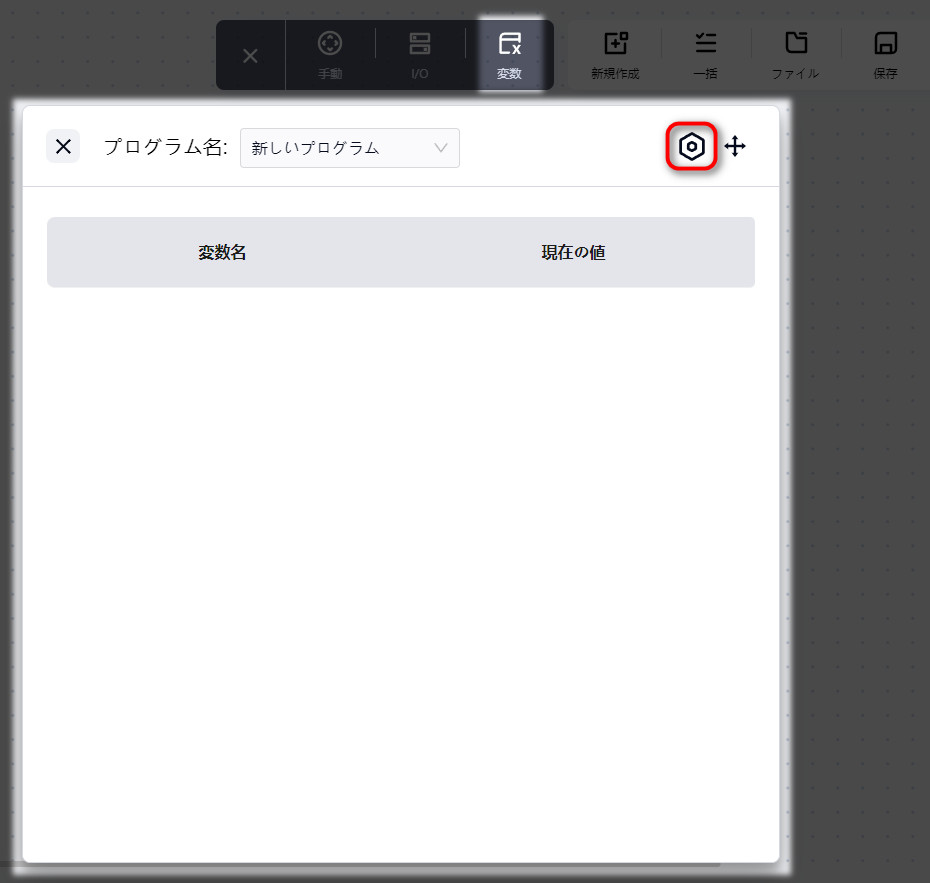
変数 をクリックすると、上記のようなデフォルトの空白ページが開きます。右上隅の ボタンをクリックすると、観測変数の設定が開き、このウィンドウで観測する変数を追加できます。


観測する変数をチェックできます。複数選択が可能です;
選択した変数を右側のボックスに移動するにはクリックします;
変更を確認して適用するにはクリックします。

ツールエリア

作成
クリックして新しいプログラムを作成します。
バッチ

バッチをクリックすると、ドロップダウンメニューが表示され、プログラムのバッチ操作を行うことができます。
左側のチェックボックスから複数のコマンドを選択し、ドロップダウンメニューから対応する機能を選択できます。
注:
操作するコマンドを選択した後、クリップボードにコピーをクリックすると、これらのコマンドがクリップボードにコピーされます。
別のプログラムを開くか、新しいプログラムを作成すると、以前にコピーしたコマンドは同じ場所からクリップボードを開くことで見つけることができます。
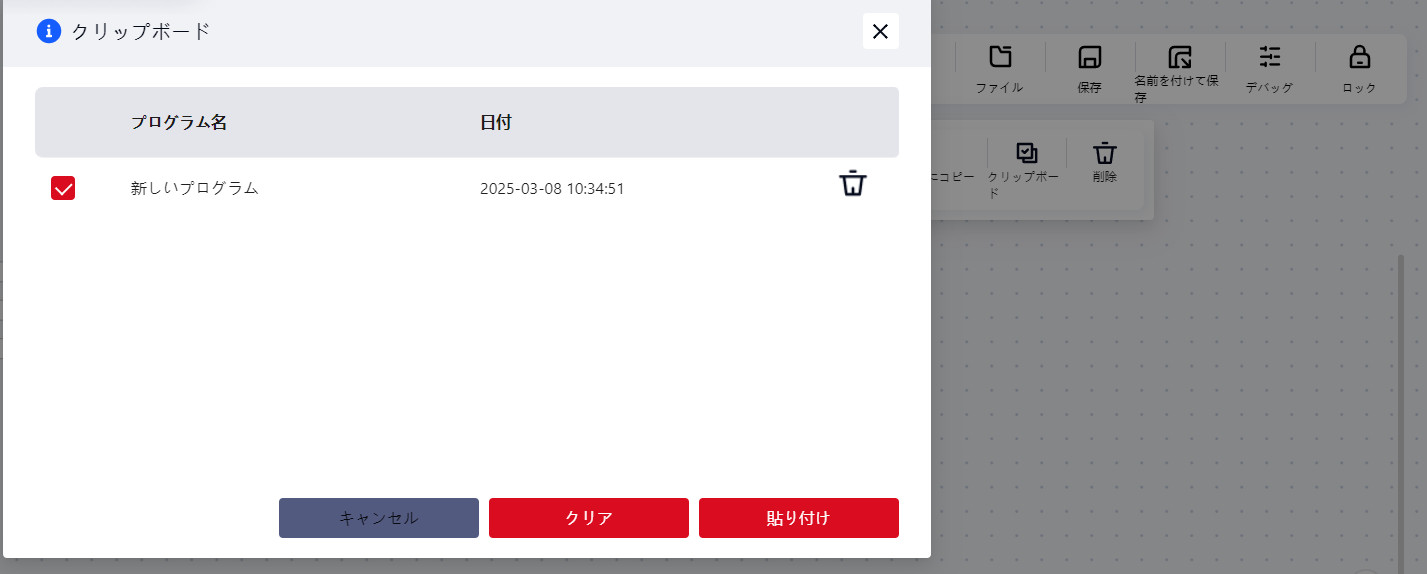
選択したコマンドをクリックして貼り付けをクリックすると、新しいプログラムにコマンドを挿入できます。
ファイル
ファイルをクリックして、リストからプログラミングファイルを直接選択し、さらに操作を行います。
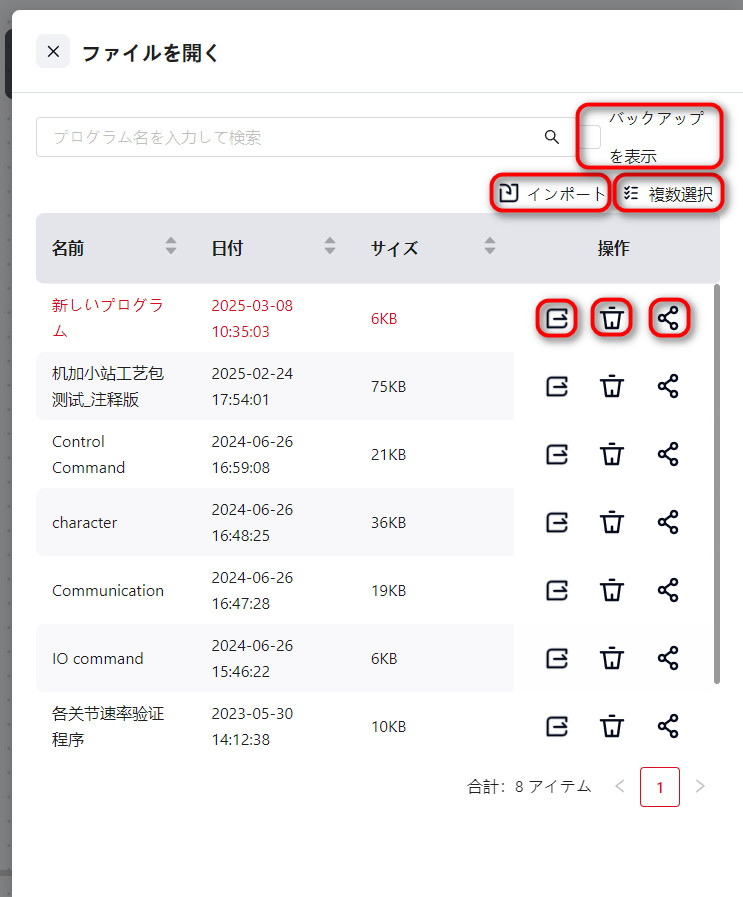
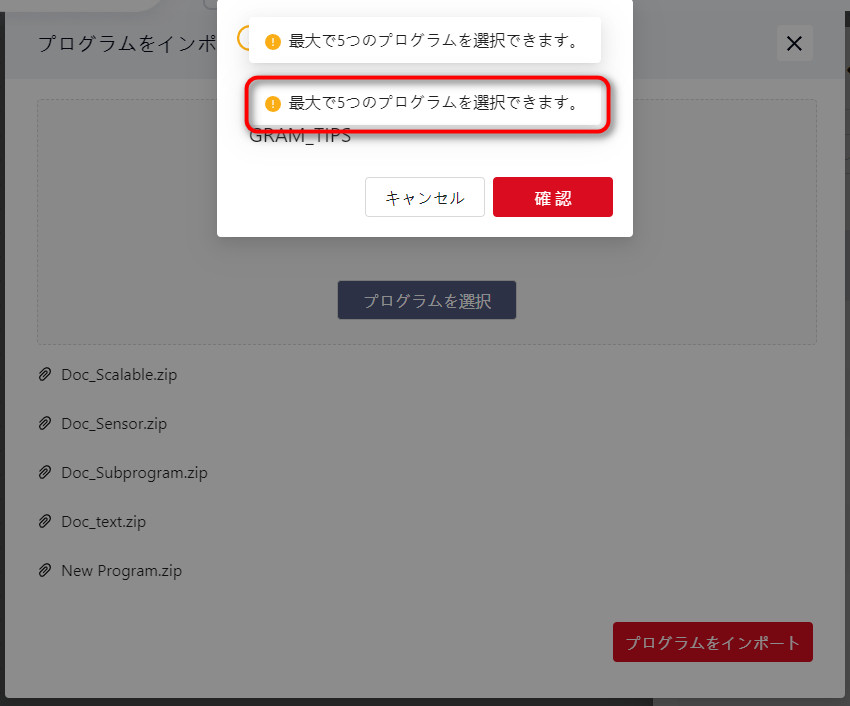
バージョン172では、インポート機能が複数のファイルを同時にインポートできるようになり、最大5つのファイルを一度にインポートできます。
保存
名前を付けて保存
名前を付けて保存をクリックして、対応する操作を実行します。

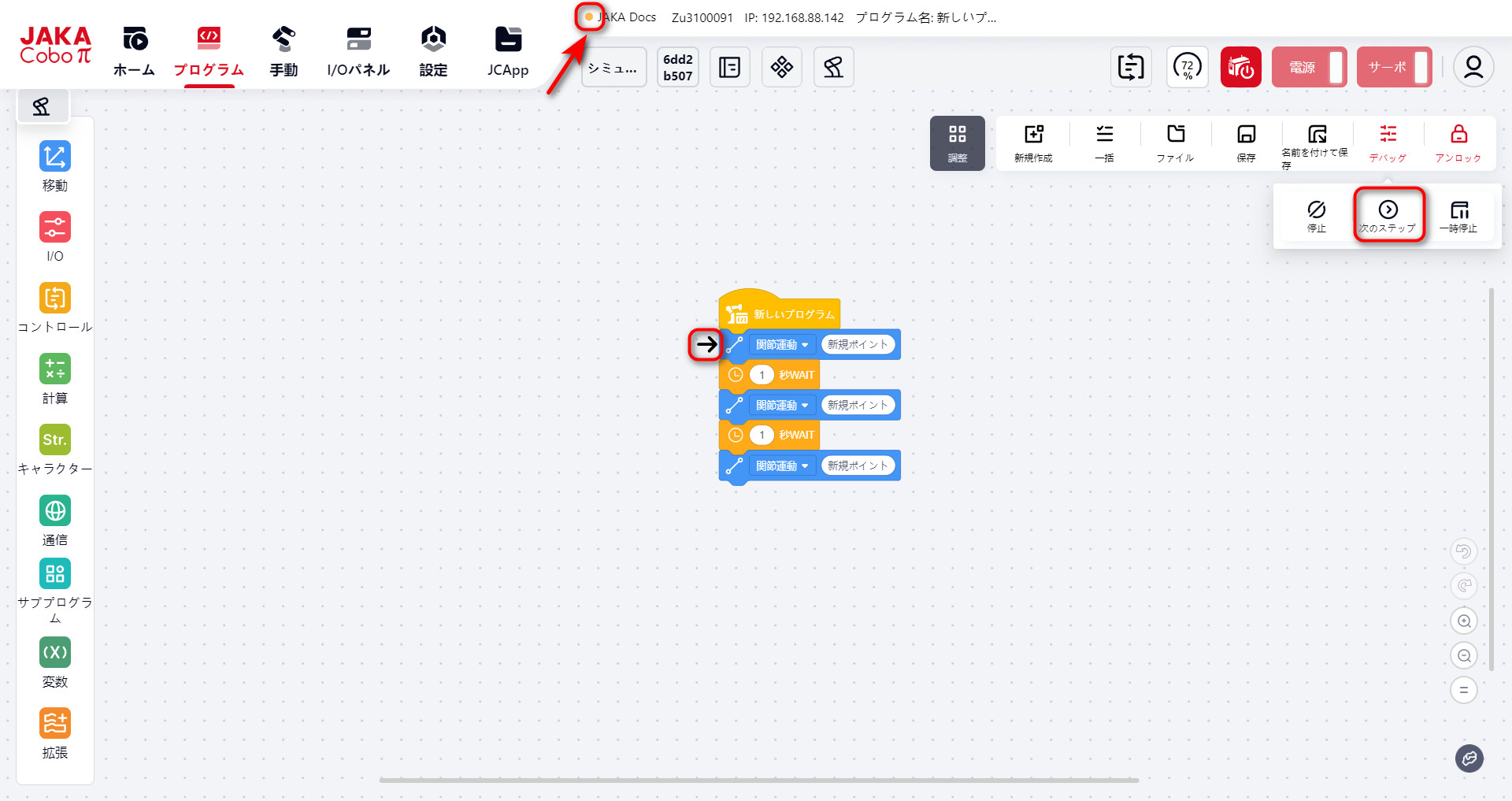
デバッグ
デバッグ をクリックすると、ロボットはデバッグモードに入り、各コマンド実行後に一時停止します。次のコマンドに進むには手動で次のステップをクリックする必要があります。
ロック
ロック をクリックすると、現在開いているプログラムはロックされ、それ以上操作できなくなります。ロック解除 をクリックすると、この状態を解除できます。
クイックアクションボタン
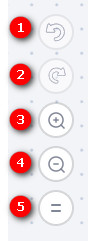
1:元に戻す
2:やり直す
3:コマンドブロックを拡大
4:コマンドブロックを縮小
5:リセット
コマンドリスト
移動(モーションコマンド)
注意:
ロボットの移動位置は座標系に従って変化します。
プログラム内で点が一つの座標系に設定され、その後座標系が変更されると、以前設定されたすべての点は新しい座標系における対応する位置に自動的に移動します。
したがって、移動コマンドを編集または実行する前に、現在の座標系を確認することが、正確な実行のために重要です。
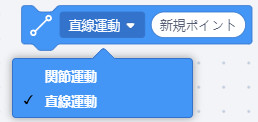
バージョン172では、ロボットの動作関連のコマンド編集ページに新しいアイコンが追加されました:


このアイコンで表示される移動方法は、**編集**ページで選択されたものと同じです。
関節移動

- ロボットが関節移動を実行できるようにします。
- アイコンをクリックすると、設定インターフェースが開き、
名前、速度、加速度を編集でき、さらに直交座標位置の使用、停止またはアーク遷移、およびコマンドの実行条件のオプションを選択できます。関節角度-編集では、手動操作ページを開いてティーチングポイントを編集できます。また、ロボットを希望の位置にドラッグし、関節角度-現在位置をクリックすると、ロボットの関節の具体的な角度がインターフェースに表示されます。


注意:
関節移動を使用する際、**直交座標位置の使用**が選択されている場合、ロボットは現在の移動で保存された直交座標位置から対応する関節角度を計算し、その後設定された位置に向けて関節移動を実行します。
直交座標を使用した関節移動

- 直交座標に記録された点を使用して関節移動を実行できます。
- このコマンドが関節移動コマンドの前に配置されている場合、後続の関節移動は直交座標系に記録された点を使用し、ロボットは自動的に逆運動学を実行します。
線形移動
- ロボットが線形移動を実行できるようにします。
- アイコンをクリックすると、設定インターフェースが開き、
名前、速度、加速度、姿勢速度、姿勢加速度を編集でき、さらに直交座標位置の使用、停止またはアーク遷移、および **コマンドの実行条件のオプションを選択できます。直交座標-編集では、手動操作ページを開いてティーチングポイントを編集できます。また、ロボットを希望の位置にドラッグし、直交座標-現在位置**をクリックすると、ロボットの座標の具体的な値がインターフェースに表示されます。

相対線形移動

- 現在のポーズを基準に、エンドエフェクターの線形移動を行うための位置変化量を設定します。位置変化量は現在のユーザー座標系での増分値です。
- アイコンをクリックすると、設定インターフェースが開き、名前、基準座標系、速度、加速度、姿勢速度、姿勢加速度を編集でき、さらに停止またはアーク遷移、およびコマンドの実行条件のオプションを選択できます。位置変化量も編集可能です。

- 例:ロボットのエンドエフェクターが現在のユーザー座標系の負のZ軸に沿って100mm移動する。

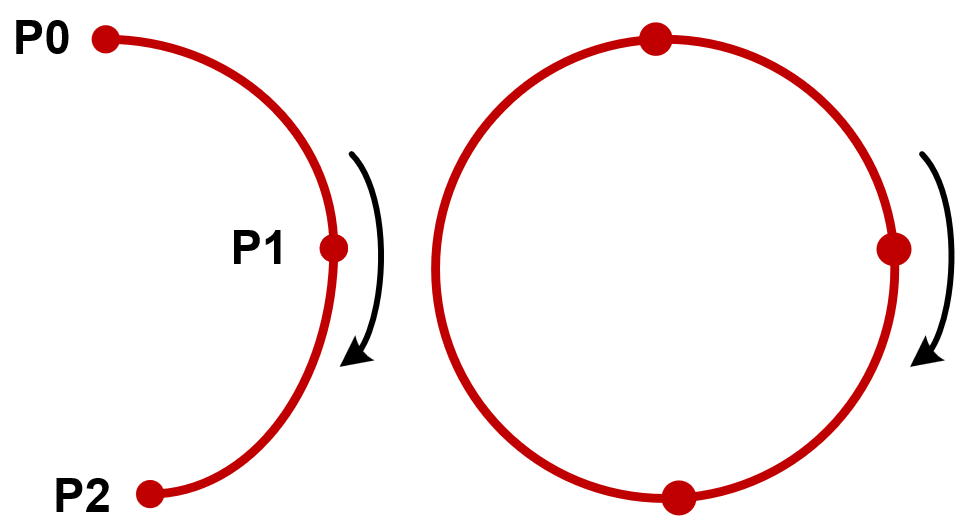
アーク移動

- アーク移動には3つの点、P0、P1、およびP2が必要です。
しかし、上記の画像のように、コマンドではP1とP2の2点のみ設定できますので、P0は別途設定する必要があります。アーク移動の前に別のコマンドがあれば、P0はその前のコマンドの最終点となります。もし他のコマンドがなければ、アーク移動の前に移動コマンドを追加し、そのコマンドの最終点をアーク移動のP0とします。
P1はアーク移動コマンドの最初の点で、アークポイント1とラベル付けされ、P2は2番目の点で、アークポイント2とラベル付けされます。

- アイコンをクリックすると、設定インターフェースが開き、
速度、加速度を編集でき、さらに停止またはアーク遷移、コマンドの実行条件、手動ティーチングまたはポイント1の直交座標、ポイント2の直交座標の直接編集、移動サークル数の選択ができます。
移動サークル数:
移動サークル数は整数でなければなりません。
サークル数が0の場合、アーク移動軌跡は初期点から終点へのアークとなります。
サークル数が1の場合、システムは設定された初期点、通過点、終点を使って1周の円を自動的に計算します。アーク移動軌跡はシステムによって計算された1周の円となります。
サークル数が2の場合、アーク移動軌跡は2周の円となり、以降同様です。
MoveZ(Z軸移動)

- ロボットのエンドエフェクターは、現在のポーズを維持しながらジグザグパターンで移動します。

- アイコンをクリックすると、設定インターフェースが開き、
名前を編集でき、開始位置、終了位置、任意の位置の手動ティーチングまたは編集、ジグザグ幅、**移動速度の編集が可能です。また、ジグザグ密度を選択し、アーク遷移**またはピーク時の停止時間のいずれかを選択できます。
注意:
ジグザグ幅:ロボットが現在の平面で移動する幅。
ジグザグ密度:同じ側のピーク間の距離で、ロボットの移動サイクルを決定します。ジグザグ密度が設定されていない場合、ジグザグ移動サイクルは現在のロボット速度によって決まります。
ピーク時の停止時間:ロボットは各ピークで停止します。**+X側の点と-X側の点**で異なる停止時間を設定できます。
デフォルトでは、ユーザー座標系のZ軸に垂直な平面がロボットの移動平面となります。この移動平面は、**任意の位置**を追加することでカスタマイズできます。この位置が **開始位置**および **終了位置とともに平面を形成し、その平面がロボットのジグザグ移動平面となり、任意の位置**は+X方向を示します。

MoveZS(Z軸のジグザグ移動)
- ロボットのエンドエフェクターは、指定された方向に移動しながら、RZ軸に沿って回転します。

- アイコンをクリックして設定インターフェースを開き、
名前を編集し、開始位置、終了位置、任意の位置を手動でティーチングまたは編集します。Z字型幅、**移動速度を調整し、オプション設定としてZ字型密度、回転角度を選択できます。さらに、アーク遷移**と **ピーク停止時間**のいずれかを選ぶことができます。
注意:
Z字型幅:ロボットの移動幅を現在の平面で設定します。
Z字型密度:同じ側のピーク間の距離で、ロボットの移動サイクルを決定します。設定しない場合、現在の移動速度によってZ字型移動サイクルが決まります。
回転角度:正または負のX軸に沿った回転運動の角度です。
ピーク停止時間:ロボットは各ピークで停止します。+X側の点、**-X側の点**に対して異なる停止時間を設定できます。
デフォルトでは、ロボットはユーザー座標系のZ軸に垂直な平面で移動します。この移動平面は、任意の位置を追加することでカスタマイズできます。開始位置、終了位置、**任意の位置で形成される平面がZ字型移動平面となり、任意の位置**が+X方向を示します。

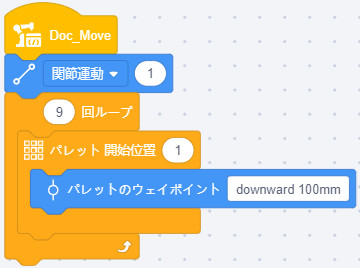
パレットウェイポイント

- このコマンドは、トレイプログラムの各トレイポイントにおけるロボットの移動終了位置を設定します。
- アイコンをクリックして設定インターフェースを開き、コマンドの
名前、速度、**加速度を編集します。停止またはアーク遷移の使用を選択し、コマンドスキップ条件を設定します。さらに、直交座標**でウェイポイントを手動でティーチングまたは編集することができます。

- 例: ロボットのエンドエフェクターは、3x3の正方形のトレイに沿って移動し、各ポイントで100mm下方向に移動します。
軌跡記録
- このコマンドは、**
設定-プログラム設定-軌跡記録**で記録された軌跡を再生します。

- 設定インターフェースを開いて、
速度、**加速度**を調整することができます。
全体速度設定

このコマンドは、すべての後続の直線移動および関節移動に対して、選択した速度変数に一致するように移動速度と加速度を設定します。
全体速度設定を閉じる

- このコマンドは、すべての後続の直線移動および関節移動に対して、元の速度と加速度を復元します。
ロボットパラメータの取得
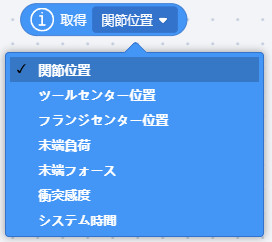
- ロボットのパラメータは、ホストコンピュータに送信するか、変数に割り当てることができます。
- 例:ホストコンピュータは、ロボットの1番から6番までの関節角度を受け取ります。

ロボットのユーザーまたはツール座標系の取得

- ロボットの座標系の値は、ホストコンピュータに送信するか、変数に割り当てることができます。
- 例:ホストコンピュータは、現在のロボット座標の値を受け取ります。

直交空間到達可能性の確認

- このコマンドは、ロボットが直交空間の移動を通じて指定されたポイントに到達できるかどうかを確認します。
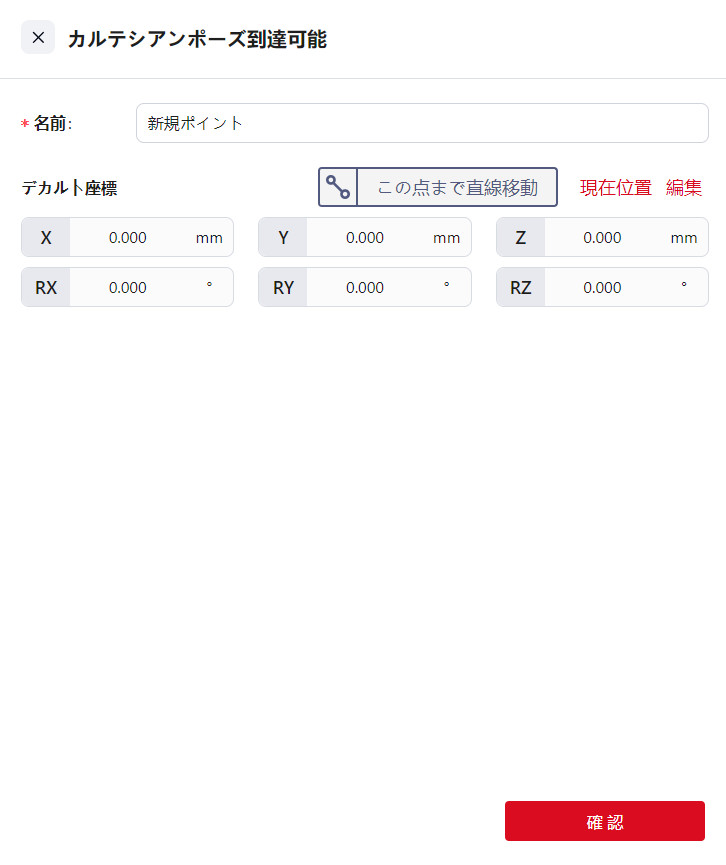
- アイコンをクリックして設定インターフェースを開き、ポイント名を編集することができ、ポイントを手動で教示するか、直接編集することができます。
ポーズキューの保存/取得

このコマンドは、カメラキャプチャから取得した素材の位置を保存または取得するために使用されます。
ポーズキューのクリア
このコマンドは、カメラキャプチャから取得した素材の位置情報をクリアするために使用されます。
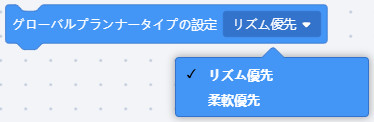
プランナー設定

ロボットプログラムの実行中、プランナーのタイプは以下のいずれかに設定できます:サイクル優先 / スムーズ優先
- サイクル優先:このモードでは、ロボットの速度は加速および減速中に直線的に変化します。サイクル優先を選択することで、ロボットの動作は高速になりますが、加速の初期および最終段階でロボットに与える衝撃が大きくなる可能性があります。このモードは通常、高サイクルシナリオで使用され、デフォルトのプランニング方法です。
- スムーズ優先:このモードでは、ロボットの加速がS字カーブに従い、加速度の変化率が一定になります。これにより、ロボットに与える衝撃が軽減され、動きが滑らかになります。このモードは、高い軌道精度が求められるシナリオに適しており、サイクルタイムが重要でない場合に使用されます。スムーズ優先は、ロボットプログラムを制御したり、特定の位置に関節を移動させたりする場合に効果的ですが、手動操作やドラッグモード、直線的に点を移動する場合には適用されません。
個々の動作命令に対するプランナータイプの設定は、編集インターフェースで行うことができますが、全体的な設定には次の2つのグローバルコマンドが導入されています:
グローバルプランナータイプを設定する
グローバルプランナーを無効にする

注意: グローバルプランニングが有効になっている場合、これらの2つのグローバルコマンド間のすべての動作命令は、個々の命令で設定されたプランナータイプよりも優先されるグローバルプランニング設定に従います。
入出力
デジタル出力を設定する

- これは即時コマンドです。プログラムで使用すると、指定されたデジタル出力(DO)信号を即座に出力します。
- 例:オブジェクト配置点に移動した後、オブジェクトを配置するためにソフトグリッパーをリリースする。

移動中にデジタル出力を設定する

- これは非即時コマンドです。プログラムで使用すると、DO信号は即座には出力されず、ロボットが移動を開始するまで信号の出力を待機します。
- このコマンドの隣接する2つのコマンドは、どちらも移動コマンドでなければならず、アーク遷移が有効である必要があります。
デジタル入力を待機する

- このコマンドは、デジタル入力(DI)信号を待機するために使用されます。
- 入力時間が0に設定されている場合、プログラムはこのコマンドで条件が満たされるまで無期限に待機し、その後次のコマンドを実行します。
入力時間が0でない場合、条件が満たされるとプログラムは次のコマンドを即座に実行し、条件が満たされない場合は指定された時間だけ待機した後、次のコマンドを実行します。
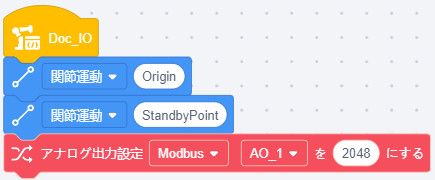
アナログ出力を設定する

- これは即時コマンドです。プログラムで使用すると、指定されたアナログ出力(AO)信号を即座に出力します。
- アナログ出力信号の値は、コマンドの白いボックスに入力でき、範囲は-65535から65535です。
- 例:ロボットが待機位置に移動した後、制御キャビネットのAO1値を2048に設定する。
移動中にアナログ出力を設定する

- これは非即時コマンドです。プログラムで使用すると、AO信号は即座には出力されず、ロボットが移動を開始するまで信号の出力を待機します。
- アナログ出力信号の値は、コマンドの白いボックスに入力でき、範囲は-65535から65535です。
- このコマンドの隣接する2つのコマンドは、どちらも移動コマンドでなければならず、アーク遷移が有効である必要があります。
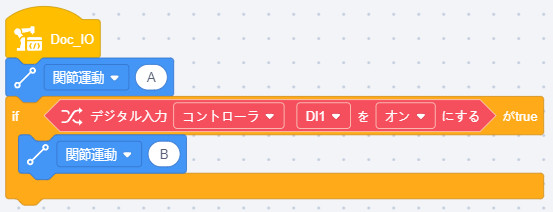
デジタル入力

- このコマンドは、デジタル入力(DI)の状態を取得するために使用され、他のコマンドと組み合わせて使用する必要があります。プログラム内で条件チェックとして使用できます。条件は、DIの状態がコマンドで設定された状態と一致したときに真となります。
- 例:現在のデジタル入力状態を確認する。もしDI1がオンであれば、ロボットはポイントAからポイントBへ移動します。
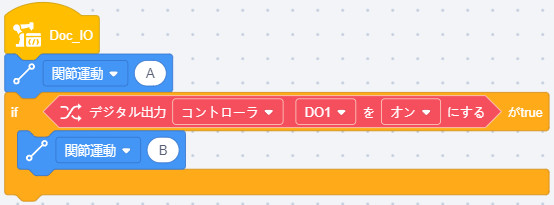
デジタル出力

- このコマンドは、デジタル出力(DO)の状態を取得するために使用され、他のコマンドと組み合わせて使用する必要があります。プログラム内で条件チェックとして使用できます。条件は、DOの状態がコマンドで設定された状態と一致したときに真となります。
- 例:現在のデジタル出力状態を確認する。もしDO1がオンであれば、ロボットはポイントAからポイントBへ移動します。
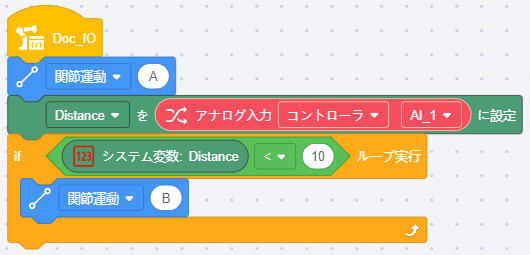
アナログ入力を取得する

- このコマンドは、アナログ入力(AI)の状態を取得するために使用され、他のコマンドと組み合わせて使用する必要があります。アナログ入力の値は変数に割り当てることができます。
- 例:現在のアナログ入力値を「distance」というシステム変数に割り当てる。「distance」変数が10未満であれば、ロボットはポイントAからポイントBへ移動します。
アナログ出力を取得する

- このコマンドは、アナログ出力(AO)の状態を取得するために使用され、他のコマンドと組み合わせて使用する必要があります。アナログ出力の値は変数に割り当てることができます。
- 例:現在のアナログ出力値を「distance」というシステム変数に割り当てる。「distance」変数が10未満であれば、ロボットはポイントAからポイントBへ移動します。

制御
ツール座標系を設定する
プログラム実行中に座標系が変更される場合、ツール座標系を設定するコマンドを使用します。このコマンドを使用した後、すべての直線移動はこのコマンドで指定された座標系内で動作し、関節の移動には影響を与えません。
ツール座標系を設定する方法は2通りあります:
- TCPを手動で入力する


Click the icon to open the settings interface, where the coordinate system's name and values can be edited.
The coordinate system set here can only be used within this program.
- 「設定」内で定義済みのTCPを選択する

- TCPを手動で入力する
ユーザー座標系を設定する
プログラム実行中に座標系が変更される場合、ユーザー座標系を設定するコマンドを使用します。このコマンドを使用した後、すべての直線移動はこのコマンドで指定された座標系内で動作し、関節の移動には影響を与えません。
ユーザー座標系を設定する方法は2通りあります:
- ユーザー座標系を手動で入力する


アイコンをクリックして設定インターフェースを開き、座標系の名前と値を編集できます。
ここで設定した座標系は、このプログラム内でのみ使用できます。
- 「設定」内で定義済みのユーザー座標系を選択する

- ユーザー座標系を手動で入力する
ペイロードと重心を設定する
- 作業中に荷重が変化する場合、ペイロードと重心を設定するコマンドを使用します。作業中に設定された荷重が実際の荷重と一致しない場合、振動や誤った衝突アラームが発生する可能性があります。
- このコマンドは、プログラム実行中にエンドエフェクタの荷重と重心を変更します。設定方法は2通りあります:
数字キーパッドをクリックするか、実際の荷重と重心を手動で入力します。

デジタル変数ブロックを白いボックスに配置し、変数の初期値フィールドに荷重と重心の値を設定します。


待機コマンド
待機コマンドには2種類あります:

- 特定の時間を待機する
待機時間を入力すると、プログラムは指定された時間だけ一時停止し、その後続行します。待機時間が0秒に設定されている場合、ロボットは無期限に待機します。
例:ロボットがポイントAに到達した後、5秒間一時停止し、その後続行します。


- 特定の条件を待機する
条件をボックスに入力すると、ロボットは条件が満たされるまで待機し、その後続行します。
例:DIがオンになるまで待機し、その後ロボットをポイントAからポイントBへ移動させる。

ループコマンド
ループコマンドには5種類があります:

- 特定の回数だけループする: プログラムがこのコマンドに達すると、指定された回数の繰り返しが完了するか、「ループ終了」コマンドに遭遇するまで、ループ内のコマンドを繰り返し実行します。設定方法は2通りあります:
- 数字パッドを直接クリックするか、繰り返し回数を手動で入力する。
- 数値変数ブロックを白いボックスに配置し、変数の初期値にループ回数を設定する。

- 無限にループする: プログラムがこのコマンドに達すると、「ループ終了」コマンドに遭遇するまで、ループ内のコマンドを継続的に実行し続けます。

- 条件付きループ: このループコマンドのダイヤモンド型ボックスに条件コマンドを挿入します。条件が満たされている限り、ループはコマンドを実行し続けます。条件が満たされなくなるか、「ループ終了」コマンドに達するとループは終了します。
例:条件が満たされている場合、ロボットはポイントAとBの間を繰り返し移動します。
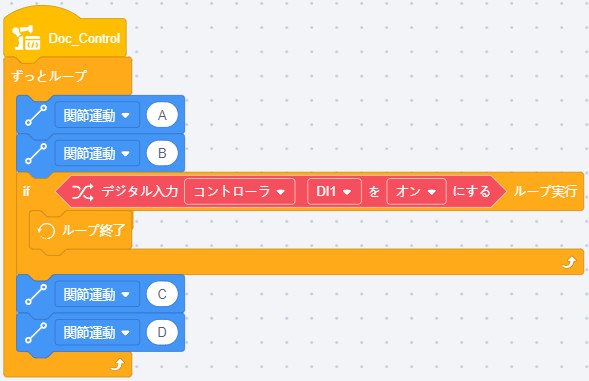
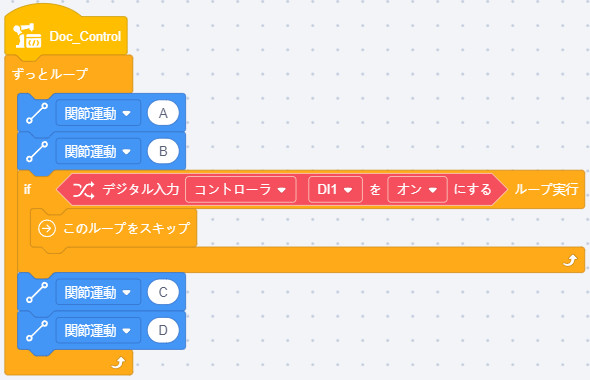
- ループ終了: このコマンドは、ループおよび条件コマンドと組み合わせて使用します。特定の条件が満たされると、最も近いループを終了します。このコマンドの前に条件を追加することで、条件が満たされるとループが即座に終了します。
例:ループ終了の条件が満たされていない場合、関節移動ABCDが実行されます。条件が満たされると、関節移動ABが実行され、その後ループが終了し、移動CDをスキップしてプログラムが終了します。

- 現在のループ繰り返しをスキップ: このコマンドは、ループおよび条件コマンドと組み合わせて使用します。このコマンドの前に条件を追加することで、現在の繰り返しがスキップされ、ループは開始点に戻り、実行を続けます。
例:現在のループ繰り返しをスキップする条件が満たされていない場合、動作ABCDが実行されます。条件が満たされると、動作ABが実行され、その後動作CDがスキップされ、ループは現在のループを終了せずに最初から続行します。
条件付きコマンド
条件付きコマンドには2種類あります:

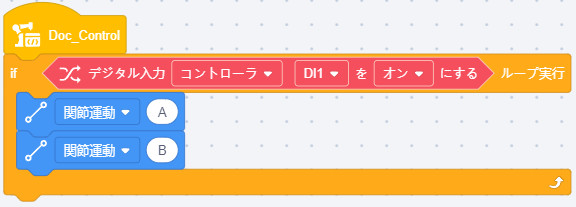
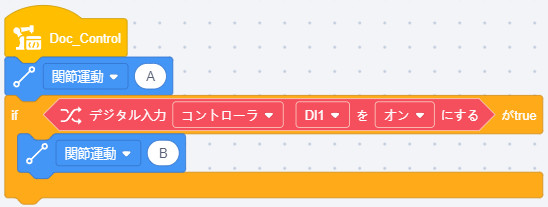
- もし…真なら: このコマンドは、コマンド内の条件が満たされているかどうかをチェックするために使用されます。条件が満たされている場合、フレーム内のプログラムが実行され、満たされていない場合は実行されません。
例:現在のDI(デジタル入力)がONの場合、ロボットはポイントAからポイントBへ移動します。現在のDIがOFFの場合、ロボットは関節移動Aのみを実行します。

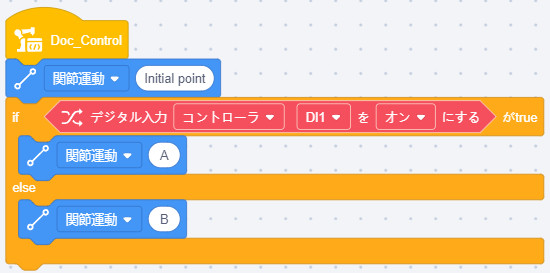
- もし…真なら、そうでなければ: このコマンドは、コマンド内の条件が満たされているかどうかをチェックするために使用されます。条件が満たされている場合、領域Aのプログラムが実行され、満たされていない場合は領域Bのプログラムが実行されます。
例:現在のDIがONの場合、ロボットはポイントAに移動します。そうでなければ、ロボットはポイントBに移動します。
パレタイジングコマンド
パレタイジングコマンドは、指定されたパターンに従ってパレット上にアイテムを積み重ねるために主に使用されます。これらのコマンドは、ループコマンドと組み合わせて使用する必要があります。
パレタイジングには3種類の配置があります:1次元(直線)、2次元(長方形)、3次元(立方体)。以下に軌道図を示します:
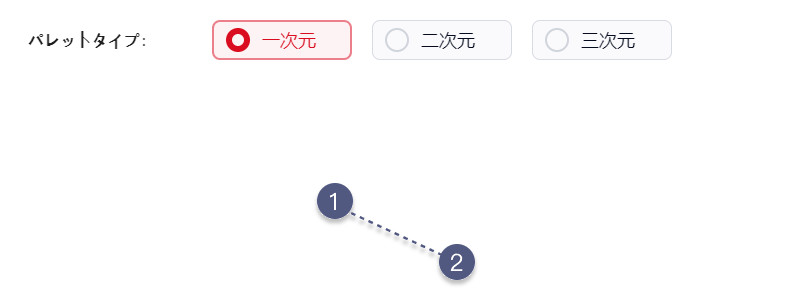
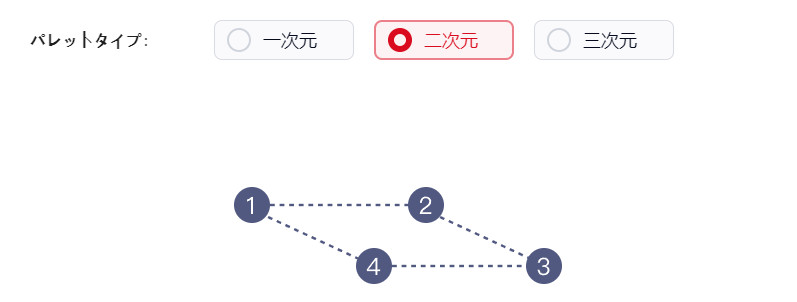
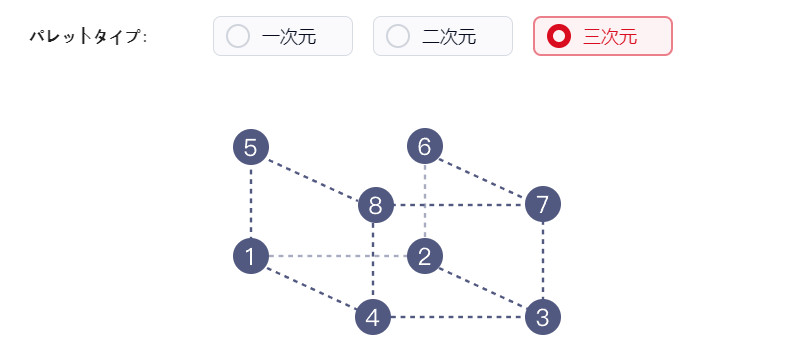
手順:
- パレットタイプ を選択する;
- 速度、加速度、ポイントで停止またはアークで遷移 を設定する。
コンベアトラッキングコマンド
これらのコマンドは、ロボットのエンドエフェクタがコンベアベルトに沿って追従し、リアルタイムでアクションを実行できるようにします。ソフトウェアでコンベアトラッキングを使用する前に、環境を設定する必要があります。これには、エンコーダを制御キャビネットに接続し、Modbus Pollとロボットとの間でModbus TCP接続を確立することが含まれます。
コンベアトラッキングには4種類があります:
直線コンベアトラッキング


- ドラッグモーションコマンド(関節モーションではなく)をコンベアトラッキング指令ブロックに入れます。このコマンドの開始位置は、ロボットの動きが開始される位置です。
- パルス相当 を計算:コンベアが移動した距離とエンコーダのパルスの変化を測定し、パルス相当を計算します。(距離測定にはキャリパーを使用し、パルス数はModbusで確認します。)
計算式は以下の通りです:
パルス相当 = 距離(mm)/ パルス数(cnt)
コンベアの方向 を設定:
- 手動入力:ユーザー座標系におけるコンベアの方向を、[0,0,0] から [X,Y,Z] の方向を指定して定義します。例えば、[1,0,0] はユーザー座標系のX軸に沿った移動を示します。
- 開始点と終了点:2点に基づいてコンベアの方向を指定します。システムは移動方向を自動的に計算し、コンベアの方向は開始点から終了点に向かいます。
開始点と終了点の座標は、ワールド座標系に対して相対的です。
トラッキング精度補償 を設定:実際の位置と教示された位置との間の誤差を補償し、範囲は±100 mmです。測定したオフセット値を補償入力ボックスに入力します。
最大トラッキング距離 を設定:ロボットが開始点から終了点まで移動できる最大距離を定義し、ロボットの動作範囲を制限します。範囲は1~3000 mmです。コンベアの長さ、ロボットの開始点と終了点、アームのリーチに基づいて値を入力します。ロボットがこの制限を超えると、停止します。
トラッキング開始距離 を設定:ロボットの開始点からコンベアのトラッキングを開始する位置までの距離を定義します。範囲は0~3000 mmです。「トラッキング開始距離」フィールドに値を入力します。
動的直線コンベアトラッキング
動的直線コンベアトラッキングは、直線コンベアトラッキングを基にしていますが、開始点と終了点に対して変数を割り当てます。位置変数や配列変数を楕円形の入力フィールドにドラッグして、これらの点を定義します。他の設定は直線コンベアトラッキングと同じです。
円形コンベアトラッキング


- ドラッグモーションコマンド(関節モーションではなく)をコンベアトラッキング指令ブロックに入れます。このコマンドの開始位置は、ロボットの動きが開始される位置です。
- パルス相当 を計算:コンベアの移動距離とエンコーダのパルスの変化を測定し、パルス相当を計算します。
パルス相当 = 距離 (mm) / パルスカウント (cnt)
- ツールの向き を設定:
- ツールの向きが変化する場合:トラッキング中にエンドエフェクタがコンベアの軸に沿って回転します。
- ツールの向きが固定される場合:トラッキング中にエンドエフェクタはユーザー座標系で固定された向きを維持します。
- コンベアの中心座標のキャリブレーション :中心はコンベア上の3点(P1、P2、P3)によって定義されます。これらの点は教示するか、ワールド座標系に対して直接入力できます。
- 3点の教示:
- コンベアベルト上の点Pを特定し、コンベアを回転させて点Pがロボットの作業領域に入るようにします。
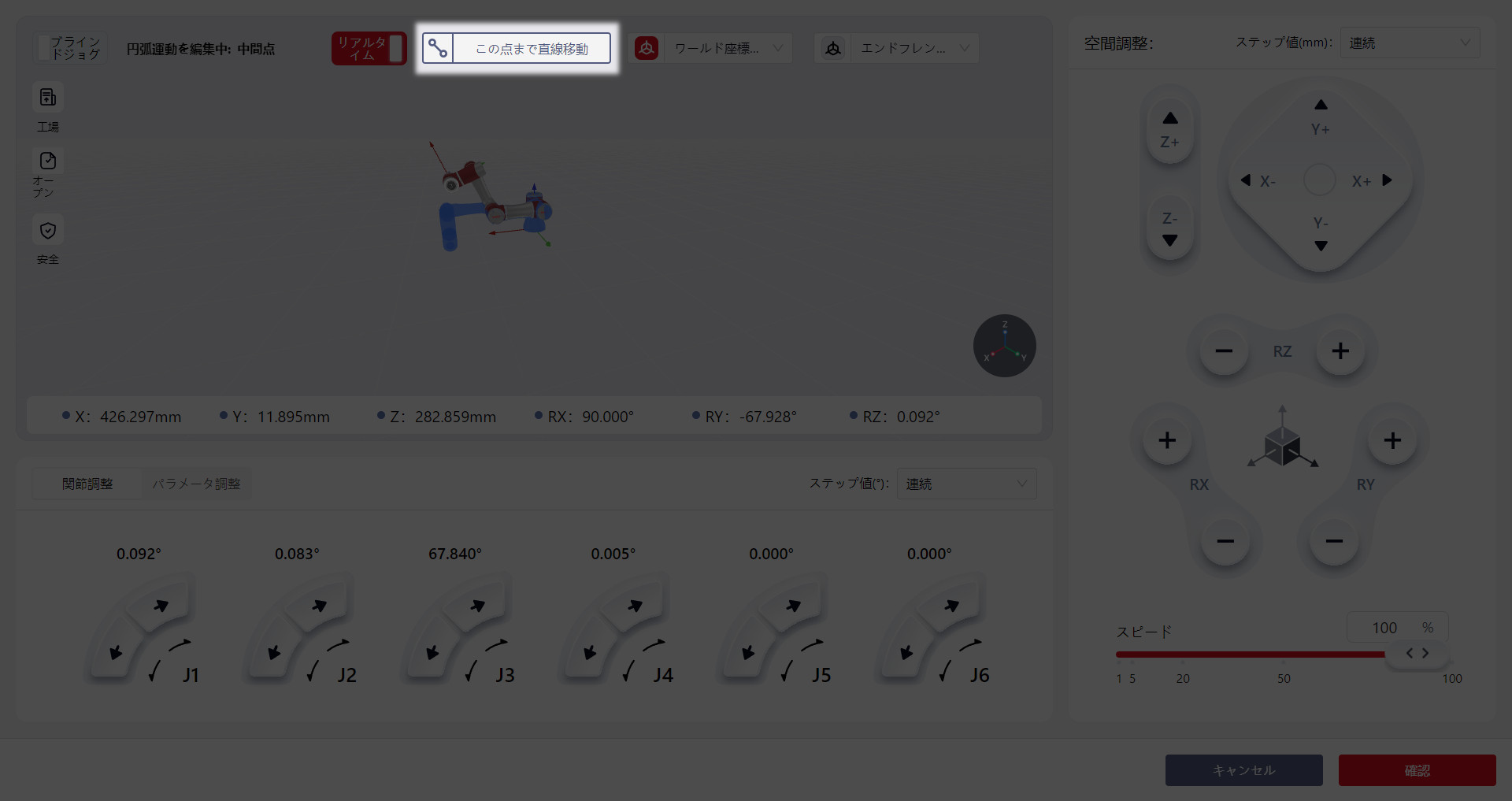
- コマンドをクリックして円形コンベアトラッキング設定インターフェースに入り、位置点1を選択してモーションコントロールインターフェースに入ります。ロボットを移動させ、ツールの先端を点Pに合わせます(注意:ユーザー座標系は「ワールド」に設定する必要があります)。その後、「確認」をクリックして位置点1の教示を完了します。
- ロボットツールを持ち上げ、コンベアを動作方向に一定角度回転させます。
- 円形コンベアトラッキング設定インターフェースで位置点2を選択し、モーションコントロールインターフェースに入って再びロボットツールの先端を点Pに合わせます(注意:ユーザー座標系は「ワールド」のままである必要があります)。その後、「確認」をクリックして位置点2の教示を完了します。
- ロボットツールを再び持ち上げ、コンベアをさらに回転させます。
- 円形コンベアトラッキング設定インターフェースで位置点3を選択し、モーションコントロールインターフェースに入って再度ロボットツールの先端を点Pに合わせます(注意:ユーザー座標系は「ワールド」のままである必要があります)。その後、「確認」をクリックして位置点3の教示を完了します。
- 円形コンベアトラッキング設定インターフェースで「確認」をクリックして、コンベアの円形中心座標系のキャリブレーションを完了します。
- 3点の入力 :3点の座標を直接入力します。
- 3点の教示:
- トラッキング精度補償 を設定:実際の位置と教示された位置との間の不一致を補償するために使用します。範囲は±100mmです。使用するには、実際のトラッキング位置と教示された位置との間の偏差を測定し、その偏差値を「トラッキング精度補償」フィールドに入力します。
- 最大トラッキング距離 を設定:このパラメータはロボットの開始点から終了点までの移動距離を定義します。ロボットのエンドエフェクタの範囲を制限するために使用され、コンベアベルトの範囲を超えたり、特異点に到達するのを防ぎます。適用範囲は1〜3000mmです。設定するには、コンベアベルトの実際の長さ、ロボットの開始位置、終了位置、およびロボットのアームリーチに基づいてパラメータ値を決定します。「最大トラッキング距離の追跡」チェックボックスをオンにし、入力フィールドに範囲値を入力します。ロボットがこの制限を超えると、移動が停止します。
動的円形コンベア追跡

ダイナミック円形コンベア追跡は、円形コンベア追跡機能を基にしており、位置点1、位置点2、位置点3の設定を変更して、変数の割り当てを使用します。位置変数や配列変数を楕円形の枠にドラッグして、コンベアの位置点1、位置点2、位置点3として使用できます。他の設定手順は、円形コンベア追跡と同じです。
コンベアキュー有効デジタル入力

この命令は、コンベアベルト上の材料の位置を取得して保存するために使用され、コンベアベルトの高速とロボットがすべての材料をタイムリーに処理できないことによる材料のロスを防ぎます。この命令は「コンベアベルトキュー取得」命令と一緒に使用する必要があります。この命令を使用すると、コンベアベルト上の材料位置情報がコントローラに記録されます。プログラムが「コンベアベルトキュー取得」命令を実行すると、保存された材料位置情報は保存された順序で取得されます。
デジタル入力ソースは、材料情報を識別するセンサーまたはビジョンデバイスに接続されたI/Oインターフェースから提供されます。
コンベアベルトキュー取得
この命令は、保存されたコンベアベルトの材料位置情報を読み取るために使用されます。
コンベアキューのクリア

この命令は、保存されたコンベアベルトの材料位置情報をクリアするために使用されます。
コマンド折りたたみ


この命令は、そのフレーム内のすべての命令を1つの命令に折りたたむことを可能にします。
この命令をクリックすると、折りたたみ効果が発生します。命令上の矢印の方向は、命令が折りたたまれた状態(上向きの矢印)か、展開された状態(下向きの矢印)かを示します。
例:以下のように命令を折りたたむ。


ログ出力の種類と内容

この命令は、プログラム内の特定のポイントでログ出力をカスタマイズすることを可能にします。
ログの種類 をドロップダウンメニューから選択し、ログ内容 フィールドに値を入力するか、文字列変数をドラッグします。出力されたログは ログ情報 セクションで確認できます。
例:指定された位置に到達した際に、ログ内容 pos1 と pos2 を出力する。

プログラムの停止または一時停止
このコマンドは、プログラム内の任意の場所に追加して、プログラムをその位置で停止または一時停止することができます。
マルチスレッドコマンド
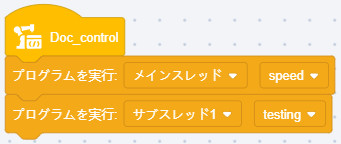
プログラム実行

このコマンドは、メインプログラムが他のプログラムを呼び出し、それをメインスレッドまたはサブスレッドとして設定することを可能にします。
メインスレッドとして設定された場合、メインプログラムはこのコマンドで指定されたプログラムファイルの実行に切り替わり、プログラムが完了するまで次のコマンドの実行に戻りません。これは順次実行です。
サブスレッドとして設定された場合、メインプログラムはこのコマンドに到達すると独立した並列スレッドを作成し、サブスレッドは指定されたプログラムファイルを実行しながら、メインプログラムはその後のコマンドを実行し続けます。これは並列実行です。最大5つのサブスレッドを作成してメインプログラムと並行して実行できます。サブスレッドは、メインプログラムが終了すると終了します。

ここでメインスレッドまたはサブスレッドで実行するコンテンツを選択します。カスタマイズ を選択した場合、呼び出すプログラムファイルの場所を白いボックスに入力する必要があります。
例:最初のコマンドは「speed」というプログラムファイルをメインスレッドとして実行し、2番目のコマンドは「testing」というプログラムファイルをサブスレッドとして実行します。
スレッド操作

上記の図に示すように、スレッド操作には2種類があります:
Wait(待機): プログラムがこのコマンドに到達すると、そのコマンド内のプログラムが完了するまで待機し、その後、次のコマンドが実行されます。
Destroy(破棄): プログラムがこのコマンドに到達すると、そのコマンド内のプログラムを終了させ、次のプログラムに進みます。
例 - 待機: ロボットがポイントAに移動した後、サブスレッド「testing」を実行し、同時にポイントBに移動します。ロボットはサブスレッド「testing」の完了を待機した後、ポイントCに移動します。
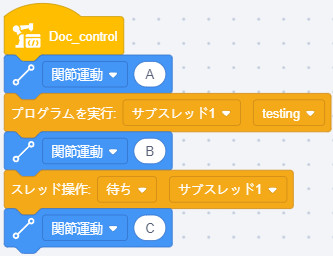
例 - 破棄: ロボットがポイントAに移動した後、サブスレッド「testing」を実行し、同時にポイントBに移動します。サブスレッド「testing」が終了し、ロボットはポイントCに向かって移動を続けます。

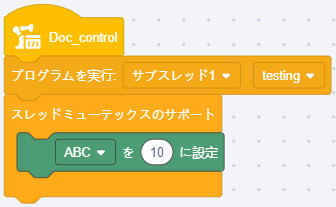
スレッドミューテックスサポート
メインプログラムに複数のサブプログラムがあり、異なるサブプログラムに同一のコマンドが含まれている場合、スレッドミューテックスコマンドを使用することで、これらのコマンド間の競合を防ぐことができます。 同一のコマンドをスレッドミューテックスコマンドブロック内に配置することで、これらのコマンドの同時実行が防止され、プログラムエラーを回避できます。
同一コマンドの実行順序は次の通りです:最初に開始されたコマンドが実行され、その他の同一コマンドは、進行中の同一コマンドの実行が完了するまで待機します。
::: 注意: このコマンドは変数にのみ有効です。 :::
例: サブスレッド1をメインスレッドに挿入し、もしサブスレッド1がシステム変数ABCを設定するコマンドも含んでいる場合、競合を避けるために、システム変数ABCの設定をスレッドミューテックスサポートコマンドブロック内に配置することができます。
計算
算術演算子
 六つの算術演算が提供されています:加算 (+)、減算 (-)、乗算 (*), 除算 (/)、剰余 (%)、および累乗 (**)。
六つの算術演算が提供されています:加算 (+)、減算 (-)、乗算 (*), 除算 (/)、剰余 (%)、および累乗 (**)。
数学関数の計算
数学関数の計算には、サイン、コサイン、タンジェント、アークサイン、アークコサイン、アークタンジェント、自然指数、自然対数、天井、床、四捨五入、絶対値、平方根が含まれます。
比較演算子

提供されている比較演算子には、次のものがあります:未満、等しい、大きい、等しくない、以下、以上。条件が満たされると、返される結果は真です。
AND(論理積)

ダイヤモンド型のボックス内の両方の条件が真である場合、返される結果は真です。
OR(論理和)

ダイヤモンド型のボックス内のどちらか、または両方の条件が真である場合、返される結果は真です。
XOR(排他的論理和)

ダイヤモンド型のボックス内の条件のうち、1つだけが真である場合、返される結果は真です。
NOT(否定)

ダイヤモンド型のボックス内の条件が偽である場合、返される結果は真です。
位置計算 (いちけいさん)
- 2つの位置を加算または減算する。
- 逆変換:これは行列の逆転を指します。位置は直交座標系を使用して計算されます。
- 例:点Pを設定し、座標が(10,10,10,10,10,10)の場合、その逆変換後の位置は(-10,-10,-10,-10,-10,-10)になります。
- 位置変換:位置変数または教示点をフレームにドラッグできます。初期ポーズを位置計算にドラッグし、ロボットの相対的なポーズの増分変換を位置変換にドラッグします。コマンドの戻り値は変換の結果です。
位置距離 (いちきょり)

位置変数または教示点をフレームにドラッグできます。コマンドの戻り値は、2つの位置間の直交座標距離です。
補間点 (ほかんてん)

このコマンドは、0から1の範囲で与えられた係数に基づいて、2つの点の間の補間点を計算します。位置変数または教示点をフレームにドラッグでき、コマンドの戻り値は補間点の位置です。
例:係数を0.5または0.25に設定すると、補間点は下記の画像に示された赤い点の位置に配置されます:

平面変換 (へいめんへんかん)
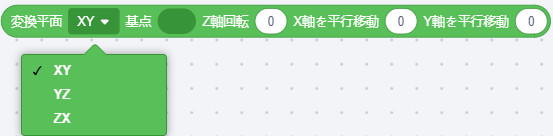
このコマンドは、XY、YZ、またはZX平面内の点を変換するために使用されます。変換は、基準点を中心にZ、X、またはY軸周りで回転し、その後、X、Y、またはZ軸に沿って平行移動を行うことです。
位置変数、配列変数、または教示点を基準点にドラッグできます。コマンドの戻り値は、変換後のポーズです。
例:まず、ユーザー座標系の方向に沿って点Pを(0,10,10)だけ平行移動させ、次にユーザー座標系のX軸を中心に点Pを10°回転させます。

逆運動学 / 正運動学
- 逆運動学(ぎゃくうんどうがく)

このコマンドを使用して、直交座標空間の値を入力し、関節角度の値を計算します。
- 正運動学(せいうんどうがく)

このコマンドを使用して、関節角度の値を入力し、直交座標空間の値を計算します。
文字列操作 (もじれつそうさ)
注意:
文字列コマンドでサポートされているエスケープ文字には、\、'、"、\n、\t、\rがあり、それぞれバックスラッシュ記号、シングルクォート、ダブルクォート、改行、水平タブ、およびキャリッジリターンに対応しています。
文字列結合 (もじれつけつごう)

このコマンドは、変数または入力された文字列を結合します。結合された文字列は文字列変数として返されます。
このコマンドをクリックすると、白い楕円形のフレーム(最大8個)の数と、必要な配列区切り文字を設定できるエディタが開きます。


文字列/配列の長さ (もじれつ/はいれつのながさ)
このコマンドは、文字列または配列の長さを計算して返します。
文字列変数、配列変数、または直接入力された文字列をコマンドにドラッグできます。
例:ホストコンピュータは、文字列変数「JAKA_AMAZING」の長さ(12)や、配列変数[1,2,3,4,5,6]の長さ(6)を取得する必要があります。

文字列比較 (もじれつひかく)

このコマンドは、2つの文字列をそのASCII値に基づいて比較します。
文字列変数や文字列の値(str1、str2)をコマンドにドラッグできます。
もしstr1 = str2であれば、戻り値は0です。
もしstr1 < str2であれば、戻り値は負の値です。
もしstr1 > str2であれば、戻り値は正の値です。
- 例:文字列変数str1とstr2のサイズを比較し、戻り値が負の値となります。

文字列フォーマット出力 (もじれつふぉーまっとしゅつりょく)

このコマンドは、指定されたフォーマットに従って指定されたデータを文字列にフォーマットします。戻り値はフォーマットされた文字列変数です。
このコマンドをクリックすると、白い楕円形のフレーム(最大8個)の数と、必要な配列区切り文字を設定できるエディタが開きます。

- 例:ロボットの関節情報を取得する:現在の関節位置:[0,90,0,90,180,0]、エンドペイロード:[0,0,0,0]。

文字列フォーマット入力 (もじれつふぉーまっとにゅうりょく)

このコマンドは、特定のフォーマットに一致する文字列を検索し、一致したデータを指定された変数に入力します。フォーマットされた結果は、整数、浮動小数点、または文字列型の変数や定数に割り当てることができます。
このコマンドをクリックすると、白い楕円形のフレーム(最大8個)の数と、必要な配列区切り文字を設定できるエディタが開きます。


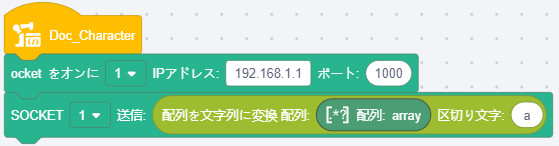
配列を文字列に変換 (はいれつを もじれつに へんかん)

このコマンドは、配列をフォーマットされた文字列変数に変換します。
変換する配列変数をArrayフィールドにドラッグし、Delimiterフィールドに文字列区切り文字を入力します。
文字列を配列に変換 (もじれつを はいれつに へんかん)

このコマンドは、特定のフォーマットの文字列を配列変数に変換します。
変換する文字列変数をStringフィールドにドラッグまたは入力し、区切り文字をDelimiterフィールドに入力します。
例:文字列変数「1a2a3a4a5a6」を配列変数[1,2,3,4,5,6]に変換します。

配列インデックスアクセス (はいれつインデックスアクセス)

このコマンドは、Index を設定することにより、配列内の特定の変数にアクセスできるようにします。
アクセスする配列変数をフィールドにドラッグし、アクセスするインデックス値を入力します。インデックスは0から始まります。このコマンドはアクセスされた要素を返します。
例:配列変数[1,2,3,4,5,6]のインデックス3の値にアクセスすると、値4が返されます。


このコマンドは、必要なインデックスとステップ値に基づいて配列内の要素にアクセスできるようにします。
アクセスする配列変数をフィールドにドラッグし、アクセスするインデックス値とステップ値を入力します。インデックスは0から始まります。このコマンドはアクセスされた部分配列を返します。

配列要素の設定 (はいれつようそのせってい)

このコマンドは、配列内の特定の要素の値を設定できるようにします。
設定する配列変数をフィールドにドラッグし、設定する要素のインデックス値を入力します。インデックスは0から始まります。
例:配列変数[1,2,3,4,5,6]のインデックス0の値を888に設定すると、配列変数は[888,2,3,4,5,6]に変わります。

通信命令
ソケットを開く

このコマンドは、TCPクライアントを作成し、TCPサーバーとの通信を確立します。
ドロップダウンリストから指定されたSOCKET IDを選択し、TCPサーバーのIPアドレスとポート番号を入力します。このコマンドを実行すると、TCPクライアント(ロボット)とTCPサーバーとの接続が確立されます。
ソケットを開き、結果を返す (そけっとを ひらき、けっかを かえす)

このコマンドは、TCPクライアントを作成し、TCPサーバーとの通信を確立し、ソケットハンドルを返します。
ドロップダウンリストから指定されたSOCKET IDを選択し、TCPサーバーのIPアドレスとポート番号を入力します。このコマンドを実行すると、TCPクライアント(ロボット)とTCPサーバーとの接続が確立され、戻り値が取得されます。接続が成功した場合、正の整数が返され、接続が失敗した場合、戻り値は-1です。
ソケットを閉じる

このコマンドは、指定されたソケット通信接続を切断します。
ドロップダウンリストから指定されたSOCKET IDを選択します。このコマンドを実行すると、指定されたソケット通信接続が切断されます。
SOCKET送信

このコマンドは、コントローラがソケット通信を介して変数をTCPサーバーに送信できるようにします。
ドロップダウンリストから指定されたSOCKET IDを選択し、変数をドラッグするか、値を入力します。実行すると、TCPサーバーはこの変数の内容を受信します。
注意:
サポートされている変数タイプには、数値、文字列、および配列があります。送信されるデータには特定のフォーマットの要件はありませんが、Unicode文字はサポートされていません
戻り値付きのSOCKET送信

このコマンドは、コントローラがソケット通信を介して変数をTCPサーバーに送信できるようにします。
ドロップダウンリストから指定されたSOCKET IDを選択し、変数をドラッグするか、値を入力します。実行すると、TCPサーバーはこの変数の内容を受信し、戻り値が取得されます。送信が成功した場合、送信データの長さが返され、失敗した場合は-1が返されます。

SOCKET受信変数

このコマンドは、変数が受信されるまで( )秒間待機することを示します。コントローラはデータ要求文字列を送信し、その後待機状態に入ります。
ドロップダウンリストから指定されたSOCKET IDを選択し、受信する変数のタイプをドラッグし、待機時間 に希望する時間を入力します。もし変数が( )秒以内に受信されるか、または( )秒を超えて変数が受信されなかった場合、プログラムは進行します。設定した待機時間が0秒の場合、ロボットは条件が満たされるまで無期限に待機します。このコマンドは、Unicode文字を含む変数名をサポートしていません。
注意:
受信するサポートされている変数タイプには、数値、文字列、および配列があります。サーバーのデータ形式は次のようにする必要があります:
数値:<'変数名'><'データ内容'>
文字列:<'変数名'><'データ内容'>
配列:<'変数名'><['データ内容']>
SOCKET受信配列

このコマンドは、ロボットが( )秒間待機し、長さ( )の配列変数を受信するまで待機します。コントローラはデータ要求文字列を送信し、その後待機状態に入ります。
ドロップダウンリストから指定されたSOCKET IDを選択します。
設定された時間内に、指定した長さ以下の配列が受信されれば、受信した配列が返されます。欠落した要素はFLOAT_MAX(FLOAT_MAX = 340282346638528859811704183484516925440)でデフォルト値として扱われます。
受信した配列が設定された長さを超える場合、Coboπはエラーを報告し、プログラムを停止します。
タイムアウトが発生して配列が受信されなかった場合、空の配列が返され、Coboπはエラーを報告せず、プログラムは続行します。
待機時間が0に設定された場合は無期限の待機を意味し、最大待機時間は65,536秒で、それを超えるとタイムアウトとして扱われます。
注意:
サーバーのデータ形式は次のようにする必要があります: [n1, n2, n3...]
例:SOCKETサーバーに接続し、配列変数Cを受信して結果を返し、配列の長さは4です。

SOCKET受信データ

このコマンドは、ロボットが( )秒間待機し、データが受信されるまで待機します。このコマンドを実行すると、コントローラは追加のデータを送信しません。
ドロップダウンリストから指定されたSOCKET IDを選択します。もし( )秒以内にデータが受信されるか、または( )秒を超えてデータが受信されなかった場合、プログラムは続行します(待機時間が0秒に設定されている場合、ロボットは条件が満たされるまで無期限に待機します)。
受信が成功した場合、関数は受信した文字列を返します。
受信に失敗した場合やタイムアウトが発生した場合、空の文字列が返されます。
注意:
受信した変数のタイプは文字列です。サーバーのデータに特定のフォーマット要件はありませんが、Unicode文字はサポートされていません。
例:SOCKETサーバーに接続し、プログラム変数Bを受信して結果を返します。

セマフォのリフレッシュ

このコマンドは、設定 ハードウェア&通信 エンドI/Oで定義されたセマフォをリフレッシュします。
ドロップダウンリストからリフレッシュするセマフォを選択し、リフレッシュレート(Hz単位)を入力します。
リフレッシュレートはバスの帯域幅によって制限されます。すべての信号の合計リフレッシュレートは125 Hzを超えてはいけません。システムはリフレッシュを自動的にスケジュールします。
セマフォのステータス取得

このコマンドは、セマフォの値を取得します。
ドロップダウンリストから必要なセマフォを選択します。コマンドは、セマフォの現在の値を返します。
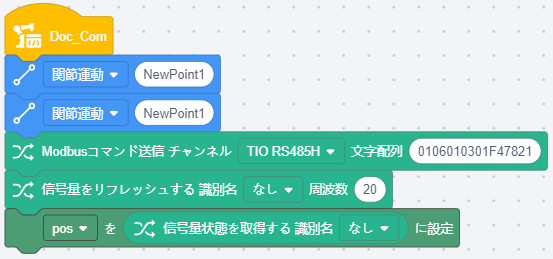
Modbusコマンドの送信

このコマンドは、外部のTIOデバイスに制御コマンドをタイムリーに送信するためのものです。
使用するTIOチャネルをドロップダウンリストから選択し、バイト配列セクションに16進データコマンドを入力します。チェックサムは自動的にシステムによって追加されるため、ユーザーは追加する必要はありません。
例:デバイスの位置を500に設定し、設定後に位置メッセージを取得します。
サブプログラム

ユーザーはサブプログラムを追加でき、これにより複数のコマンドを一つのエンティティに統合し、メインプログラムで使用することができます。これにより、表示が簡素化され、処理速度が向上します。
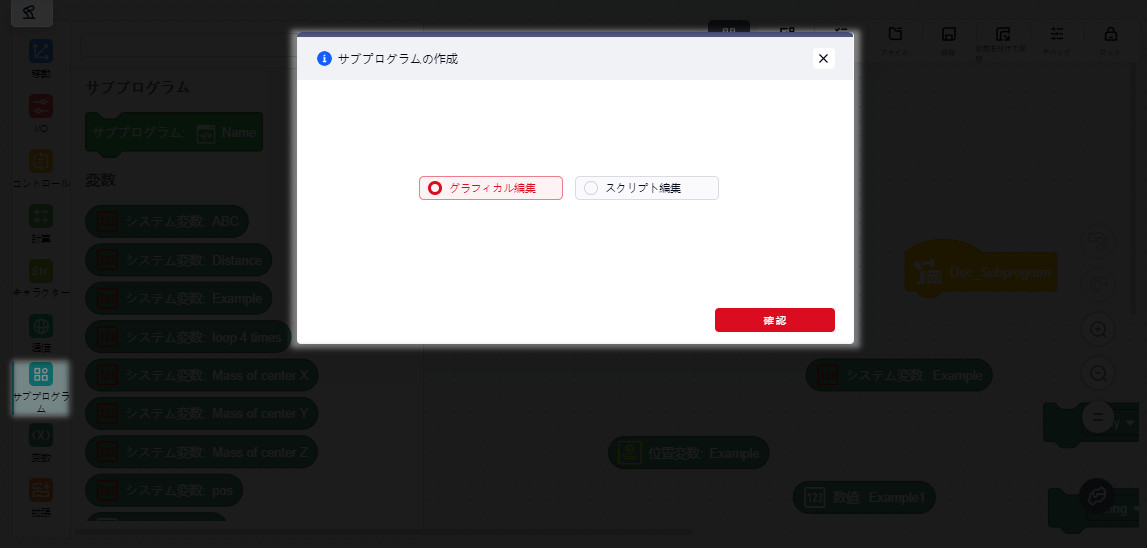
サブプログラムの追加
まずメインプログラムを開くか保存し、次に右側のコマンドバーでサブプログラム - +をクリックします。サブプログラム作成ページが表示され、必要に応じてグラフィカル編集またはスクリプト編集を選択し、確認をクリックします。
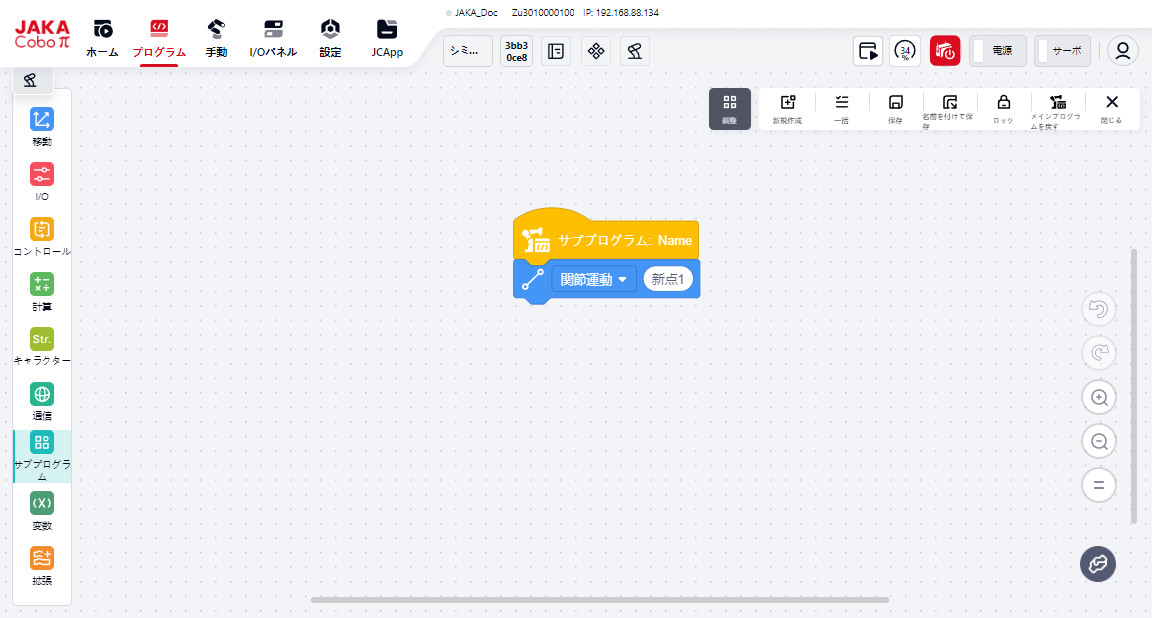
サブプログラムのグラフィカル編集
操作はメインプログラムと同様です。コマンドの編集が完了したら、必ず保存をクリックし、次に閉じるをクリックしてサブプログラム編集ページを終了し、メインプログラムページに戻ります。
サブプログラムが正常に保存されると、編集したサブプログラムがサブプログラムバーに表示されます。この時点で、サブプログラムは1つのコマンドとして機能し、他のコマンドと同様にメインプログラムにドラッグして繰り返し使用できます。

サブプログラムのスクリプト編集
- 操作は上記と同様です。特定のスクリプトプログラミングの要件については、JAKAロボットスクリプトマニュアルを参照してください。
注:
サブプログラムを編集するには、サブプログラムコマンドバーまたはメインプログラムで対象のサブプログラムボックスをクリックして、サブプログラム編集インターフェースに入ります。
サブプログラムを編集した後、メインプログラムを再度保存して、サブプログラムがメインプログラムで正しく更新されることを確認してください。
バージョン172では、新しいメインプログラムボタンが追加されました:
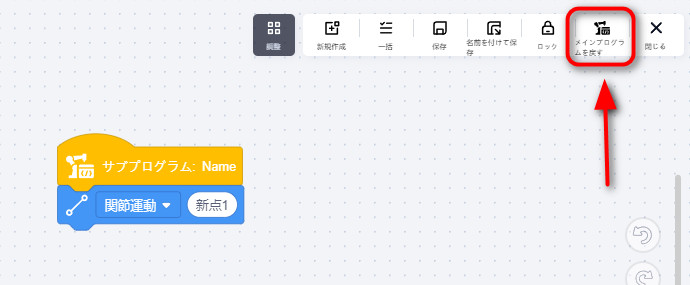
このボタンをクリックすると、現在のサブプログラムのメインプログラムページに即座に戻ります。
変数(へんすう)
変数の追加(へんすうのついか)
変数を追加するには、右側のコマンドバーで変数 - +をクリックします。変数の追加ページが表示され、ユーザーは必要な変数のタイプを選択し、確認をクリックして追加できます。
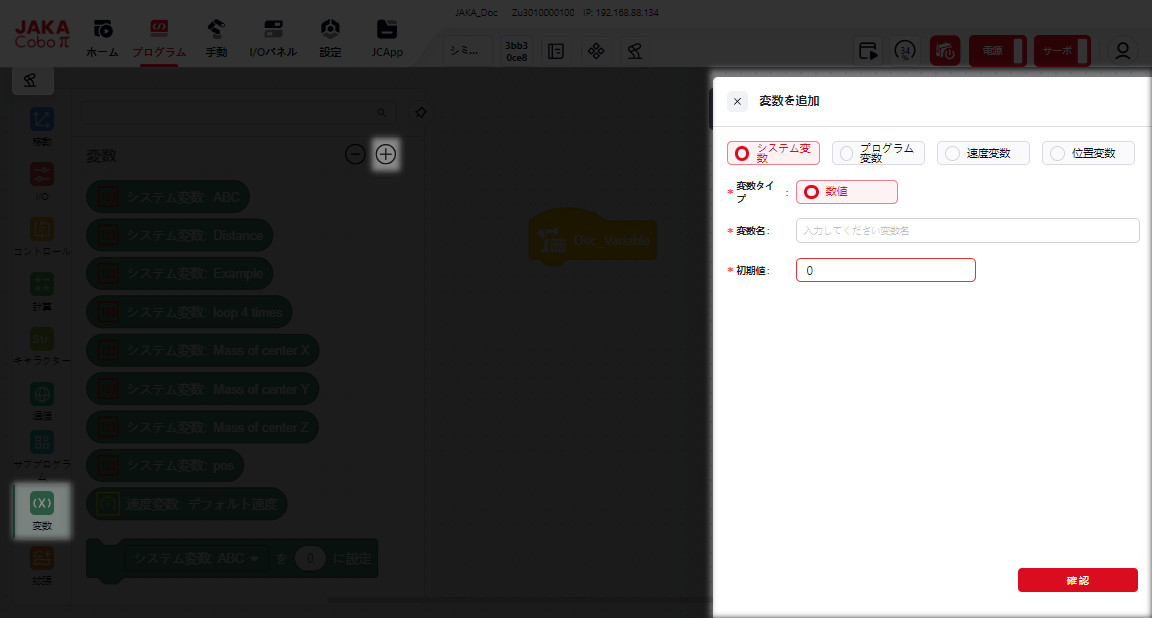
追加された変数は、右側のコマンドバーに表示されます。
システム変数(しすてむへんすう)

システム変数は制御キャビネットに保存されます。そのため、ロボットの電源が切れたり、プログラムが削除されたりしても、これらの変数はクリアされず、削除されることはありません。これらの変数はどのプログラムからでもアクセスできます。
注:
上記の方法に加えて、システム変数は設定 - プログラム設定 - システム変数から作成および管理することもできます。
プログラム変数(ぷろぐらむへんすう)

プログラム変数は現在開いているプログラム内で使用するために作成され、そのプログラム内でのみアクセス可能です。現在のプログラムが削除されると、変数も削除されます。
プログラム変数には3種類があります:数値型、文字列型、配列型。
プログラム変数の名前には中国語の文字を使用できます。ただし、サードパーティシステムと通信する際には、エンコーディングの問題により中国語の名前が文字化けする可能性があることに注意してください。
速度変数(そくどへんすう)
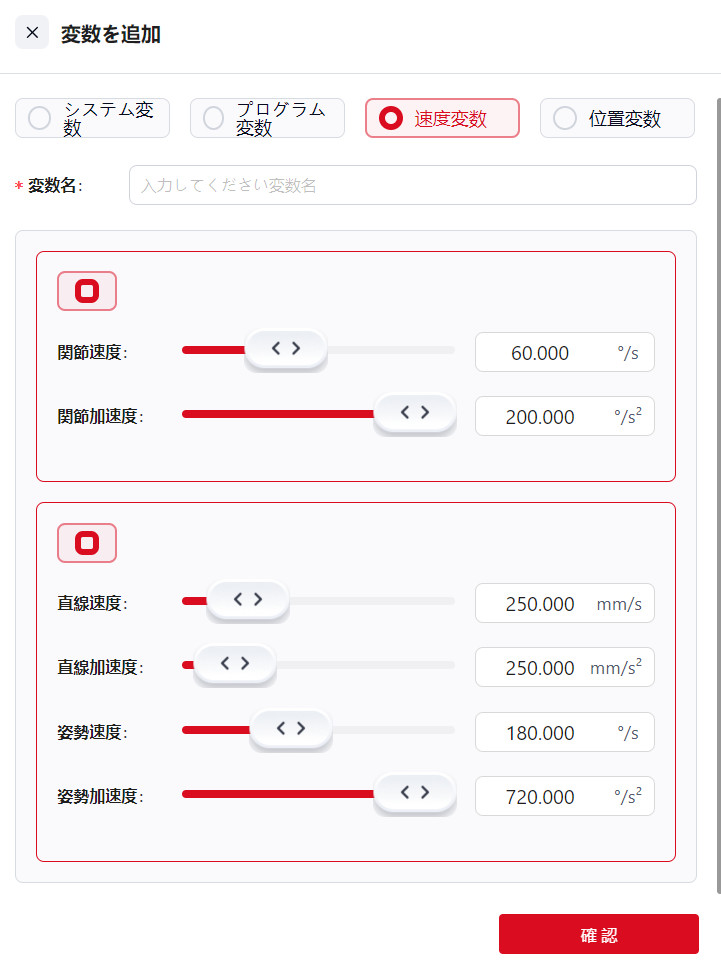
速度変数は、移動 セクション内のグローバルな速度関連コマンドを使用してオンまたはオフに切り替えることができる特別な種類の変数です。
このコマンドは、プログラムの実行中にロボットの動作速度を実際の作業条件に基づいてグローバルに制御します。
速度変数がグローバル速度コマンドを通じて呼び出されると、その後のすべての動作はコマンドで定義された速度に従い、個々の動作コマンド内の速度設定は無効になります。
プログラム変数と同様に、速度変数は現在開いているプログラム内でのみ使用可能です。
注:
速度変数はSOCKETコマンドを通じても送信できます。送信される内容には、関節速度、関節加速度、線形速度、線形加速度が含まれます。
位置変数(いちへんすう)

位置変数(いちへんすう)は、運動命令や位置計算命令で使用され、他の命令で呼び出すことはできません。プログラム変数と同様に、位置変数は現在開いているプログラム内でのみアクセス可能です。
位置変数は、ロボットのカルテシアン座標(直線座標)や関節座標(ジョイント座標)を定義するために使用されます。値はフィールドに直接入力することも、編集 をクリックしてポイントティーチングの手動操作ページにアクセスして編集することもできます。
カルテシアン座標の設定時には座標系の選択に注意が必要です。選択した座標系が実際の設定と一致しない場合、ロボットの位置がオフセットされ、安全リスクが生じる可能性があります。
位置変数が運動命令に配置されると、位置変数内のポイント情報が呼び出され、ロボットの動作がガイドされます。
変数設定コマンド


左側のコマンドバーから変数コマンドを操作ページにドラッグします。追加された変数タイプをドロップダウンメニューから選択します。他の操作は他のコマンドと似ています。
白い楕円形のフィールドには、定数、変数、またはSOCKETを介して取得した値を入力できます。
配列変数全体に値を代入する場合、具体的な値を角括弧[ ]で囲みます。下記のように示します。

文字列に値を代入する場合、内容を二重引用符""で囲みます。下記のように示します。

拡張する
これらの指示はJAKAフォースセンサーと一緒に使用する必要があります。
定数
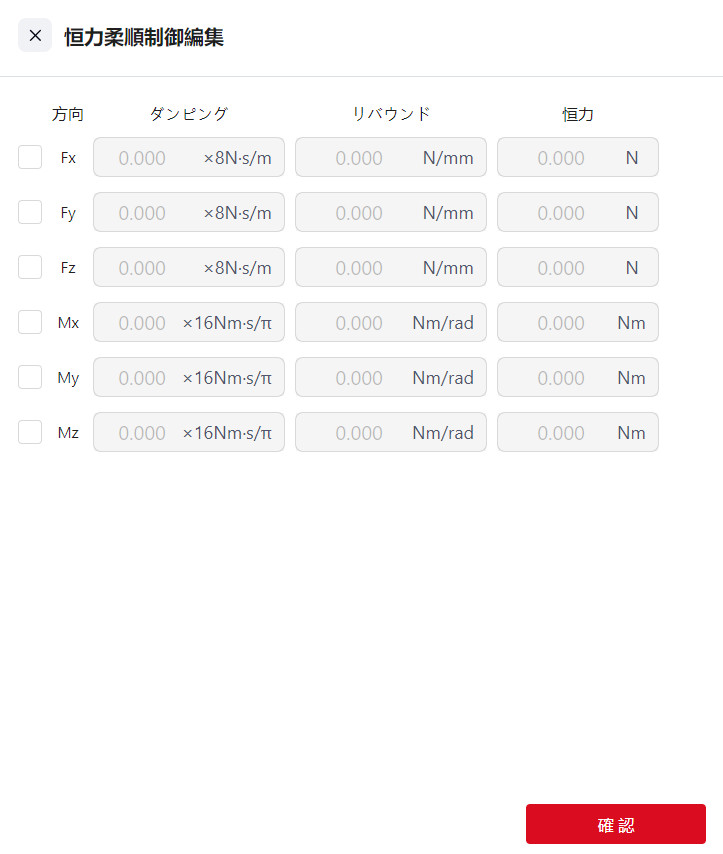
定常力順応パラメータ
- 意味: 定常力モードで順応パラメータを設定します。
- 使用方法: 力制御を有効にする方向を選択し、各方向で減衰力、反発力、定常力を設定し、方向追跡を有効にするかどうかを選択します。
- 減衰力: プログラムが実行されると、外部環境の剛性が大きいほど、設定する必要のある減衰力も大きくなります。ドラッグモードでは、Fx、Fy、Fzは10N以上、Mx、My、Mzは0.2Nm以上を推奨します。設定値は0にできません。
- 反発力:ロボットが事前設定された軌道に戻る力です。設定値が大きいほど、ロボットが事前設定された軌道から逸脱するのが難しくなります。
- 定常力:ロボットのエンド部と外部環境との接触力が設定された定常力値以内に収まるようにします。
定常力順応制御を開く

- 初期化: センサーのバイアスや荷重などを補償します。(このモードに入る際、センサーが外部の力と接触していないことを確認してください。)
- 初期化しない: 前回の補償値を使用します。
定常力順応制御を閉じる

定常力順応制御を閉じる
速度順応制御
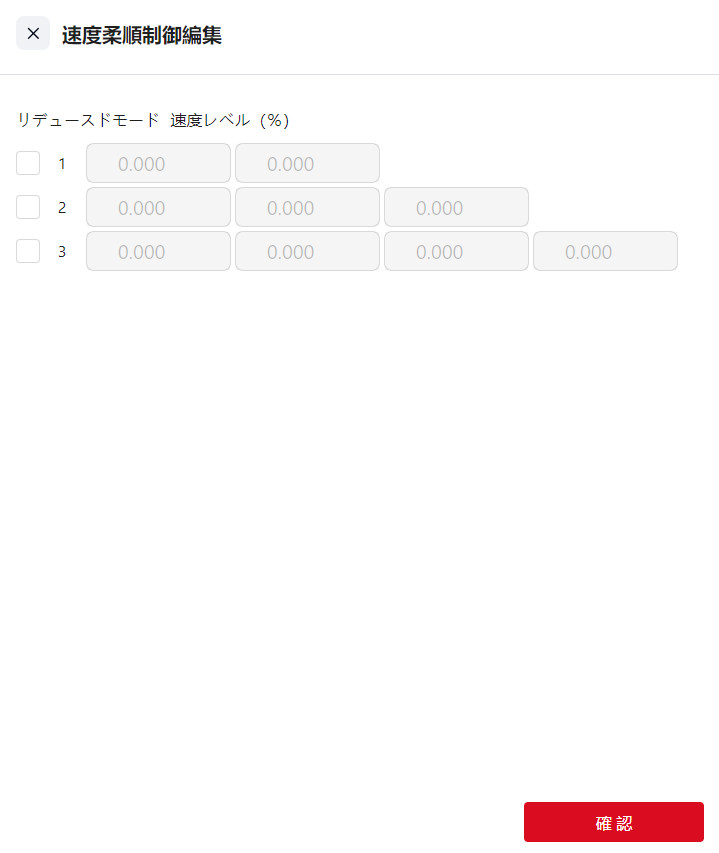
速度順応パラメータ
- 意味: 速度モードで順応パラメータを設定します。
- 使用方法: 減速レベルを設定します。最大で3段階の減速を設定できます。ロボットのエンド部にかかる力が制御力の設定値を超えると、ロボットは減速し、センサー検出値が制御力設定値未満になるまで減速を続けます。ユーザーは各減速レベルの元の速度に対する割合を設定できます。
速度順応制御を開く

速度順応制御を開き、初期化するかどうかを選択します。
- 初期化: センサーのバイアスや荷重などを補償します。(このモードに入る際、センサーが外部の力と接触していないことを確認してください。)
- 初期化しない: 前回の補償値を使用します。
速度順応制御モードを閉じる
速度順応制御モードを閉じる
順応制御力
力制御モードで制御力を設定するために使用します。
動作停止条件

- 意味: 動作終了の条件を設定します。
- 使用方法: 監視する方向を確認し、上限または下限を設定します。接触力が下限を下回るか、上限を超えると、動作終了条件がトリガーされます。この指示は次の動作指示を監視します。動作終了条件がトリガーされると、ロボットは現在の位置から次の動作指示で設定された位置に即座に移動します。
