手動制御
手動制御

このアイコンをクリックすると、手動制御インターフェースが開きます。
手動制御インターフェースは、以下の三つの主要な機能エリアに分かれています: シミュレーションモデルエリア、操作エリア、浮動ジョギングエリア。
シミュレーションモデルエリア
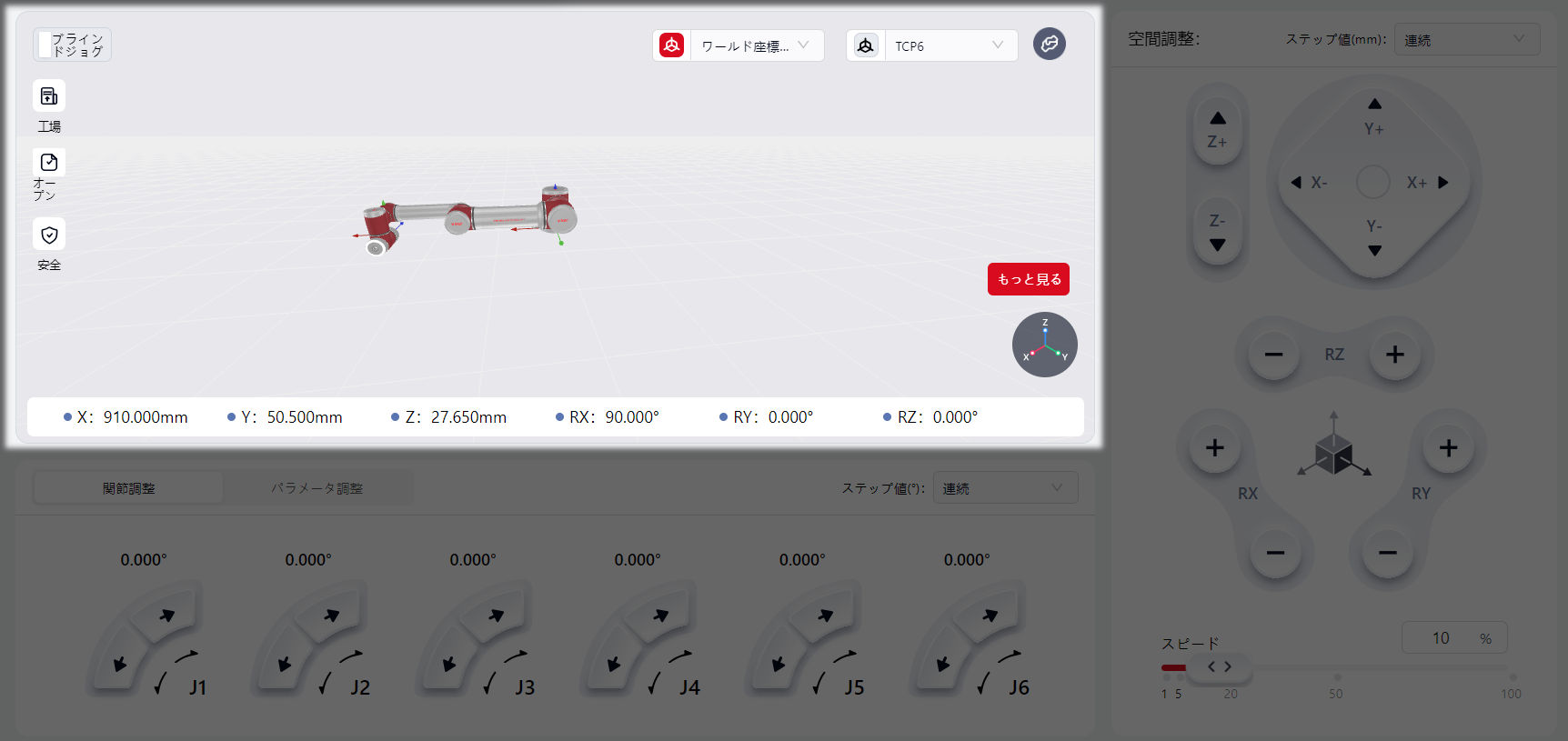
このエリアの具体的な機能には以下が含まれます:
浮動ジョギングボタン
このボタンをクリックすると、浮動ジョギングモードが有効になります。詳細な機能については、浮動ジョギングエリアをご覧ください。
方向クイックリストアボタン
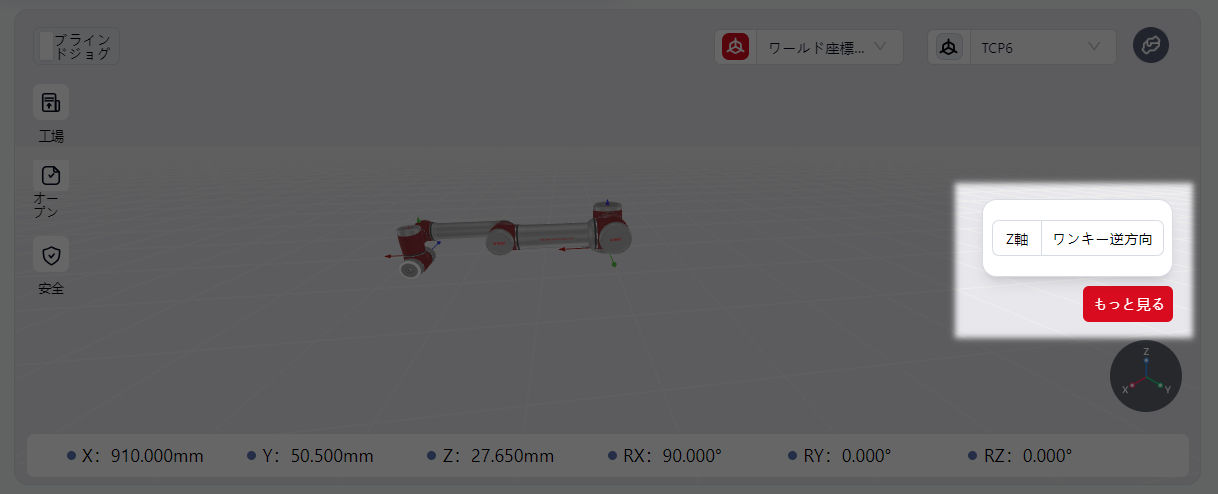
これらの3つのボタンのいずれかを長押しすると、ロボットを工場出荷時方向、オープン方向、および安全方向に復元します。
ボタンを押している間、ボタンは赤く点灯し、ロボットが移動していることを示します。ロボットは選択した方向に到達すると、移動を停止します。
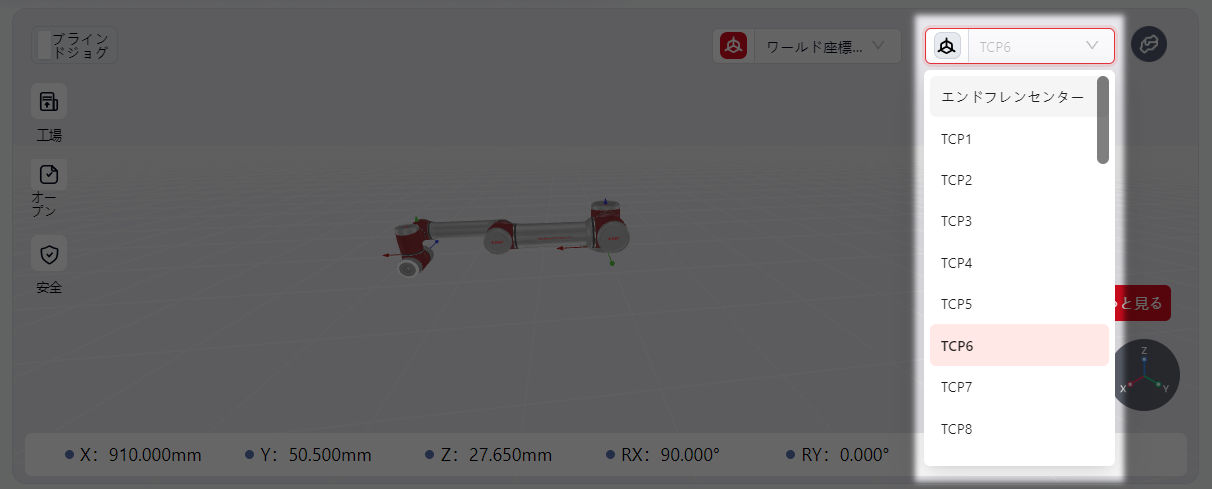
座標系切り替え

このオプションでは、ロボットがデカルト空間で移動する際に、ワールド(ユーザー)座標系とツール座標系を切り替えることができます。
アイコンが赤く表示されている場合、選択した座標系がアクティブであることを示します。ドロップダウンボックスをクリックすると、異なるワールド(ユーザー)座標系とツール座標系を選択できます(これらの座標系の設定は設定インターフェースに詳細があります)。

シミュレーションモデル表示エリア
このエリアの3Dモデルは、使用中の実際のロボットまたはシミュレーションロボットと一致し、ロボットのリアルタイムの動きやシミュレートされた動きを表示します。
このエリアにマウスをホバーして、マウスホイールをスクロールすると、ロボットの全体構造や詳細をより良く見るためにズームインまたはズームアウトできます。
左マウスボタンを押したままマウスを動かすと、視点の方向を変更でき、ロボットを360°の視点で観察することが容易になります。
右下の円形アイコンにはX、Y、Z軸が表示され、ロボットの現在の移動方向を明確に示します。
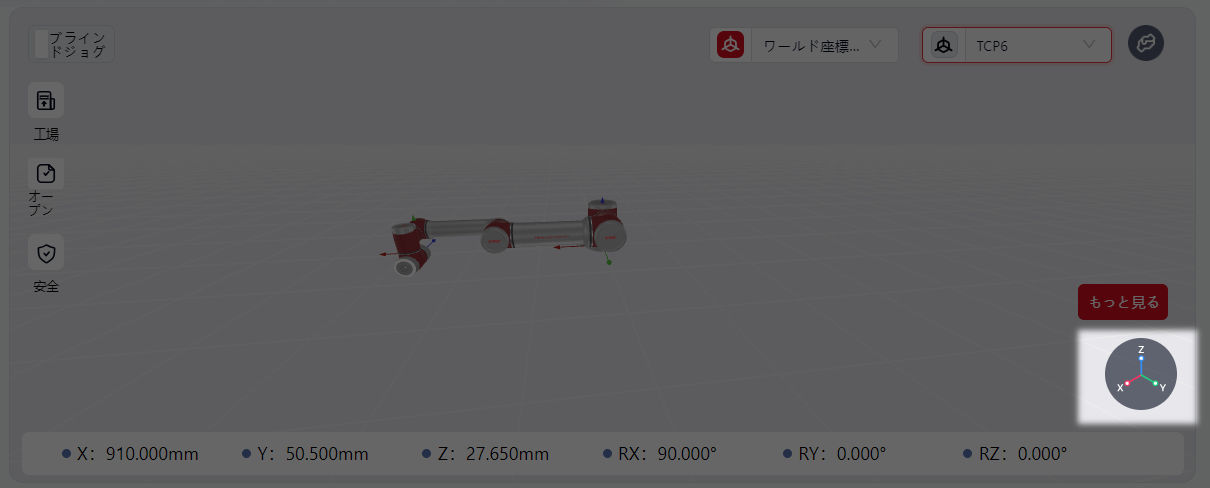
パラメータ表示エリア
このエリアは、物理的なロボットまたはモデルが動作しているときに、ツール座標系のポーズがワールド(ユーザー)座標系内でどのように表示されるかを示します。
操作エリア
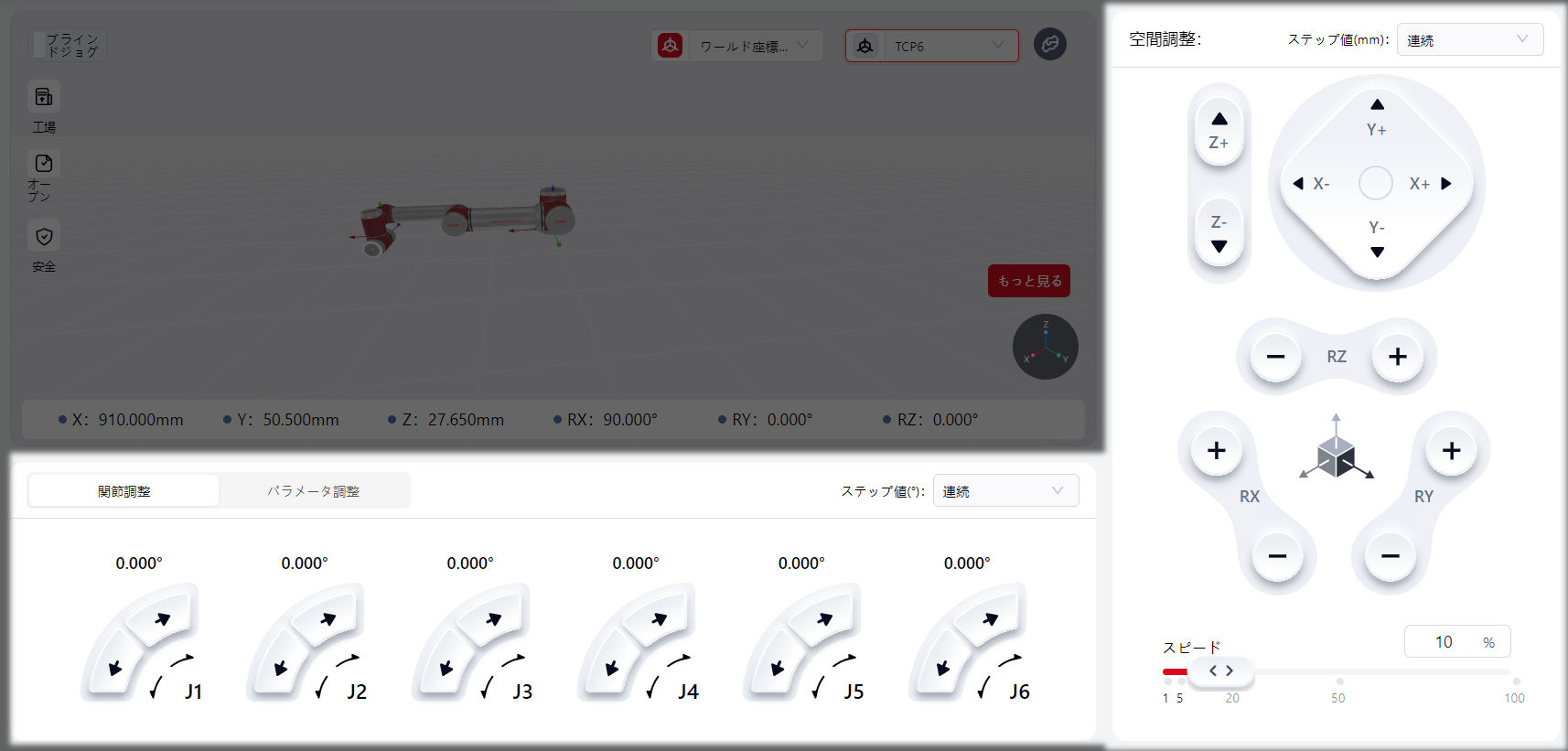
このエリアでは、ロボットを空間調整、関節調整、およびパラメータ調整の方法で制御できます。
バージョン172では、手動操作エリアでのデフォルトの速度は10%です:
他のセクション(例:プログラミングページ)から手動操作ページに移動すると、デフォルトで速度は10%に設定されたままです。
- バージョン172では、ユーザー定義機能がサポートされています。
ユーザー定義を選択した後、ユーザーは入力フィールドに値を入力できます(数字と小数点のみが許可されます)。範囲は0~100で、精度は小数点以下2桁まで設定できます。

- バージョン172では、Zu 20用の逆転駆動機能が導入されました。
このモードでは、ロボットの関節ブレーキが解除され、最小限の力で関節を動かすことができます。
衝突シナリオでは、逆転駆動機能により、ロボットが有効な状態で特定の関節ブレーキを選択的に解除し、すべてのロボットブレーキを解除することなく関節を目標位置に移動させることができます。
詳細をクリックすると、操作ボタンが表示されます
逆転駆動 を長押しすると、ロボットが逆転駆動モードに入ります。ユーザーは、希望する関節をドラッグしてその動きを強制できます。
注意:
ロボットは逆転駆動モードに入るために、電源が入っており、かつ有効な状態である必要があります。
逆転駆動モード中に関節の移動速度が50°/sを超えると、オーバースピード検出によりシステムは逆転駆動モードを終了します。
警告:
ロボットが逆転駆動モードにあるとき、解除された関節は重力によって急速に落下する可能性があります。ブレーキを解除する前に、ロボットおよび取り付けられたツールや作業物の効果的なサポートを確保してください。
- バージョン172では、ワンキー姿勢調整機能が導入されました:
この機能により、ロボットのフランジを特定の角度に迅速に調整することができます。操作手順は以下の通りです:
詳細をクリックすると、操作ボタンが表示されます:
X/Y/Z軸 ボタンをクリックして、基準座標軸を切り替えます。
ワンキー整列/ワンキー反転 ボタンを長押しして、ロボットのフランジ姿勢を調整します。選択したフランジ座標系の座標軸が、基準座標系の対応する軸と整列します。
X/Y/Z軸 :基準座標系とフランジ座標系のX、Y、またはZ軸。
ワンキー整列/ワンキー反転 :
ワンキー整列:基準座標系とフランジ座標系の選択された軸方向を整列させます。
ワンキー反転:両システムの選択された軸の方向を反転させます。
空間調整
これは、ロボットのツール座標系原点をワールド(ユーザー)座標系内(すなわちデカルト空間)で制御するもので、増分または連続的な動きを行うことができます。

インターフェース上の仮想ジョイスティックを長押しまたはクリックすると、ジョイスティックが赤に変わり、操作がアクティブでロボットが動いていることを示します。ジョイスティックを離すと、灰色に変わり、ロボットの動きが停止します。
ステッピング 設定では、連続的な動きや特定の増分動作を設定できます。
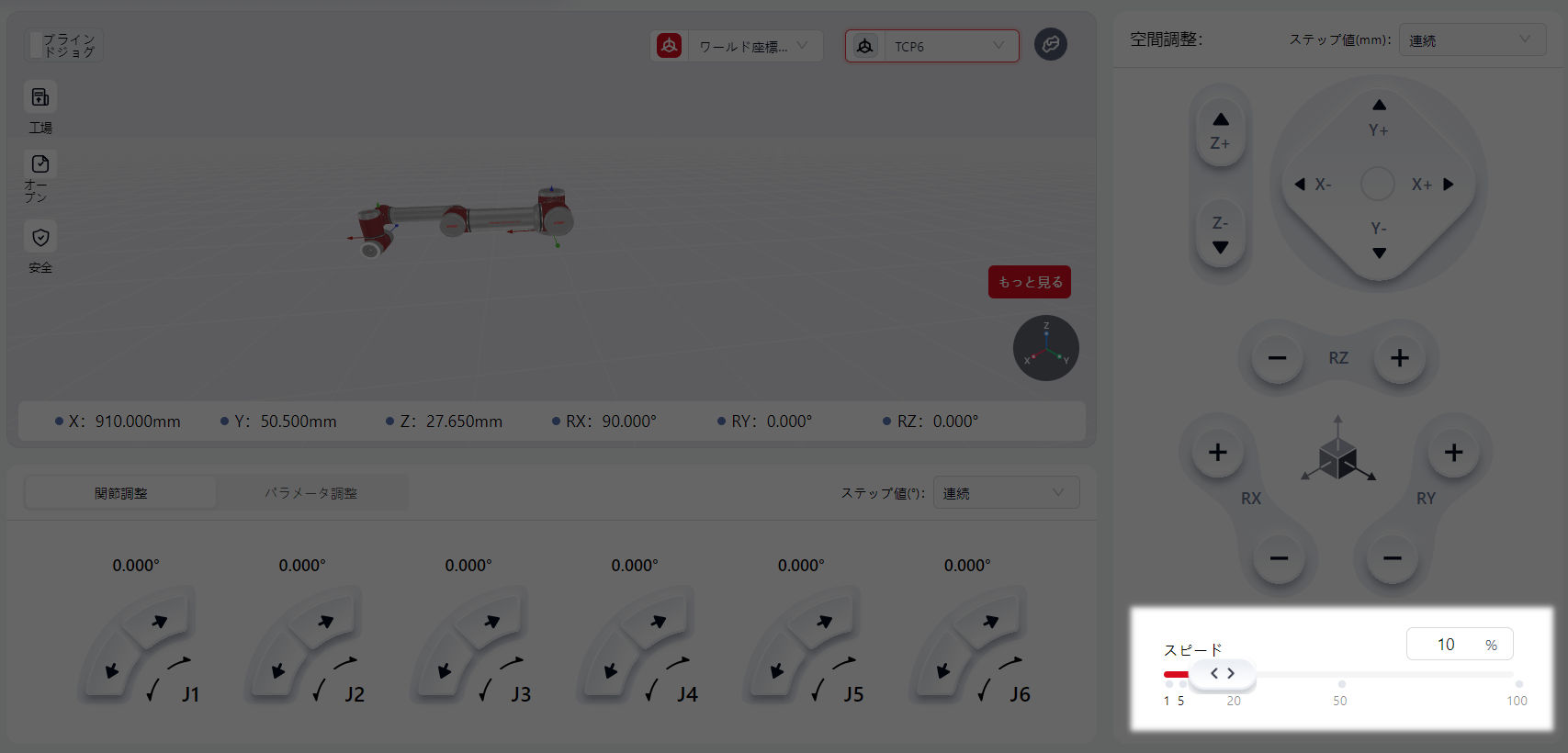
速度 設定では、スライダーをドラッグするか、ボックス内に値(1~100)を直接入力することで、ロボットの移動速度を調整できます。
関節調整
これは、ロボットの各関節を独立して制御し、増分または連続的な動きを行うものです。

インターフェース上の仮想ジョイスティックを長押しまたはクリックすると、ジョイスティックが赤に変わり、操作がアクティブでロボットが動いていることを示します。ジョイスティックを離すと、灰色に変わり、ロボットの動きが停止します。
ステッピング 設定では、連続的な動きや特定の増分動作を設定できます。
空間調整-速度 では、スライダーをドラッグするか、ボックス内に値(1~100)を直接入力することで、ロボットの移動速度を調整できます。
パラメータ調整
これは、ツール座標位置 または 関節位置 の正確な値を入力することで、ロボットの移動を特定の位置に制御することができます。
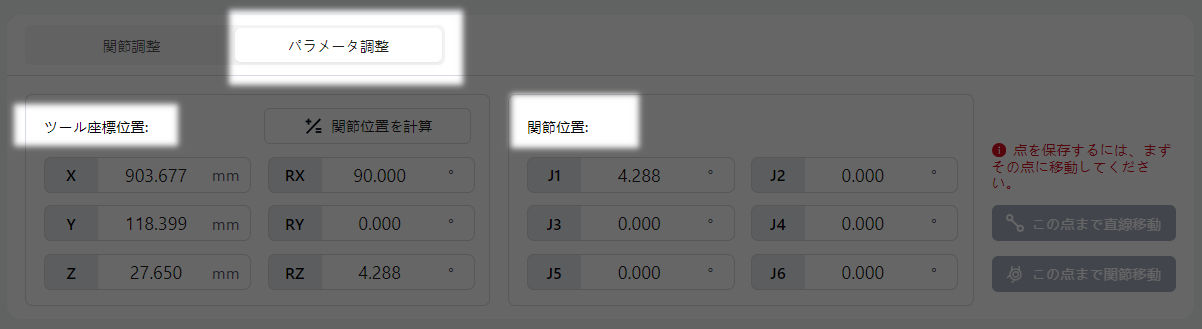
ツール座標位置
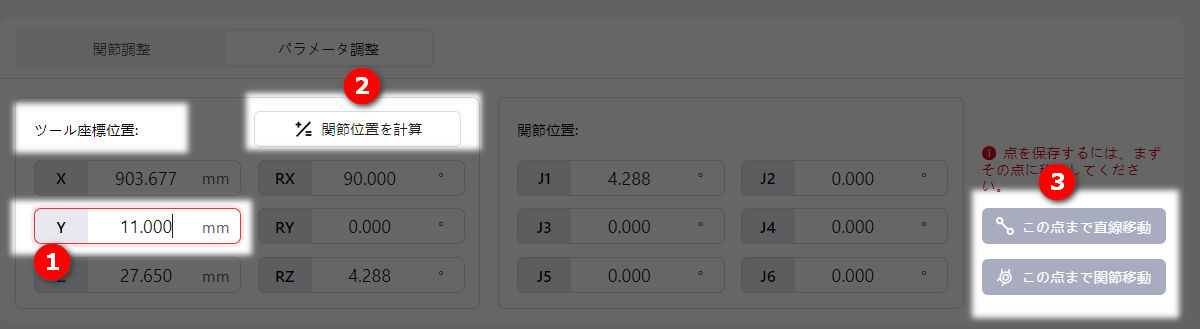
異なる軸に対応するボックスに値を入力した後、関節位置を計算 をクリックし、次に直線移動でポイントへ または 関節移動でポイントへ を長押しします(ボタンが押されると赤くなります)して、ロボットを指定された位置に移動させます。ロボットは指定された位置に到達すると自動的に停止します。
注意:
ツール座標位置を設定する際は、座標系が適切に設定されていることを確認してください。
空間調整-速度 では、スライダーをドラッグするか、ボックス内に値(1~100)を直接入力することで、ロボットの移動速度を調整できます。
関節位置
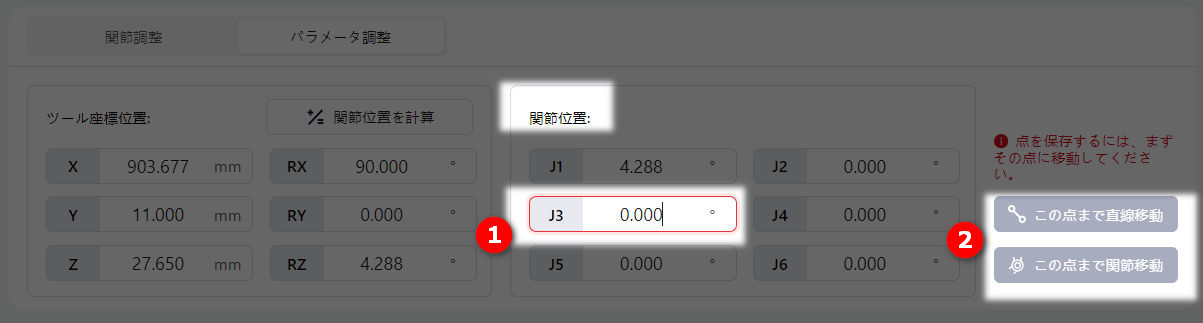
異なる関節を表すボックスに具体的な値を入力した後、MoveLで移動 または MoveJtで移動 を長押しします(ボタンが押されると赤くなります)して、ロボットを指定された位置に移動させます。ロボットは指定された位置に到達すると自動的に停止します。
ロボットの移動速度は、空間調整-速度 で調整できます。スライダーをドラッグするか、ボックス内に具体的な値(1~100)を直接入力することで調整できます。
浮動ジョギングエリア
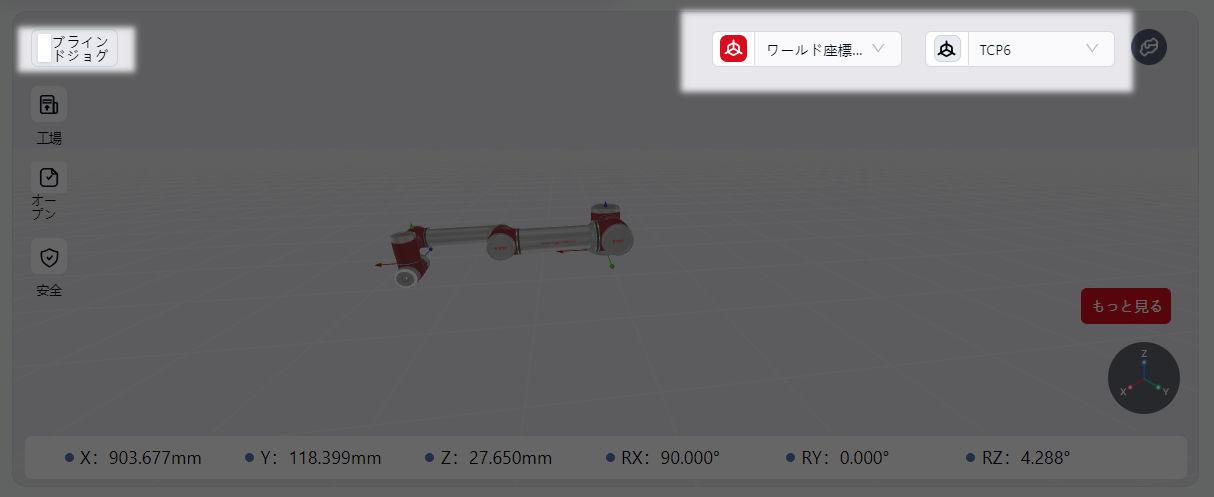
浮動ジョギング をクリックして、ブラインド操作エリアインターフェースに入ります。
注意:
ブラインド操作機能を有効にした後、このインターフェース外のワールド(ユーザー)座標系およびツール座標系の設定は引き続き有効です。
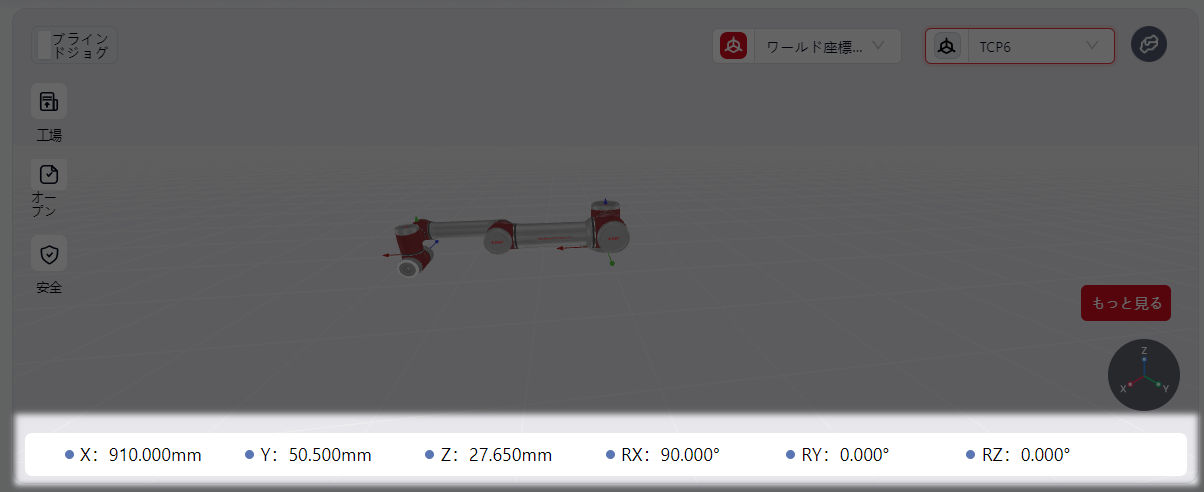
姿勢パラメータ表示と速度調整
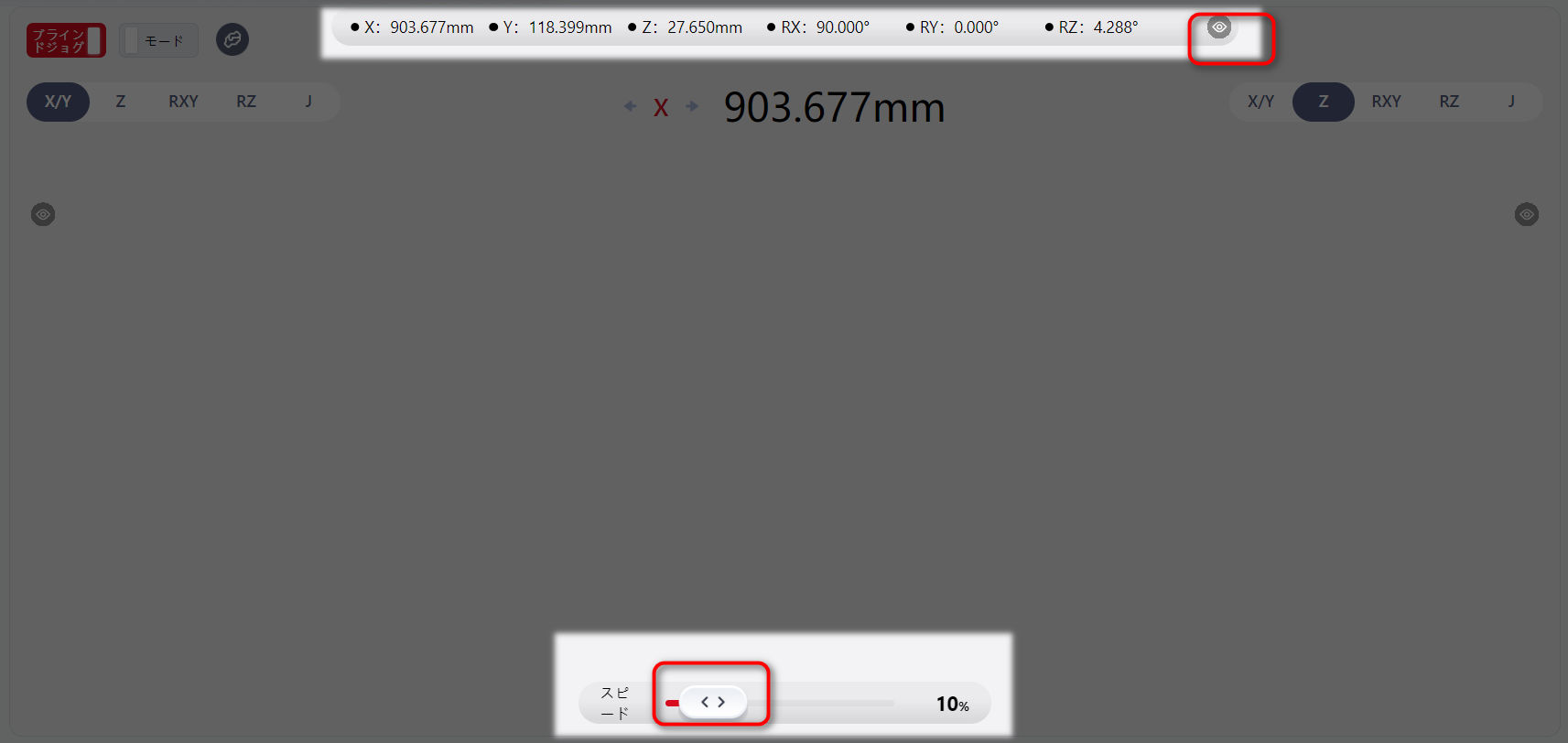
ロボットの移動のリアルタイム姿勢パラメータはページの上部に表示されます。目のアイコンをクリックすると、パラメータ表示が隠れ、再度目のアイコンをクリックすると表示が復元されます。
ロボットの移動速度はページの下部にあるスライダーをドラッグすることで調整できます。
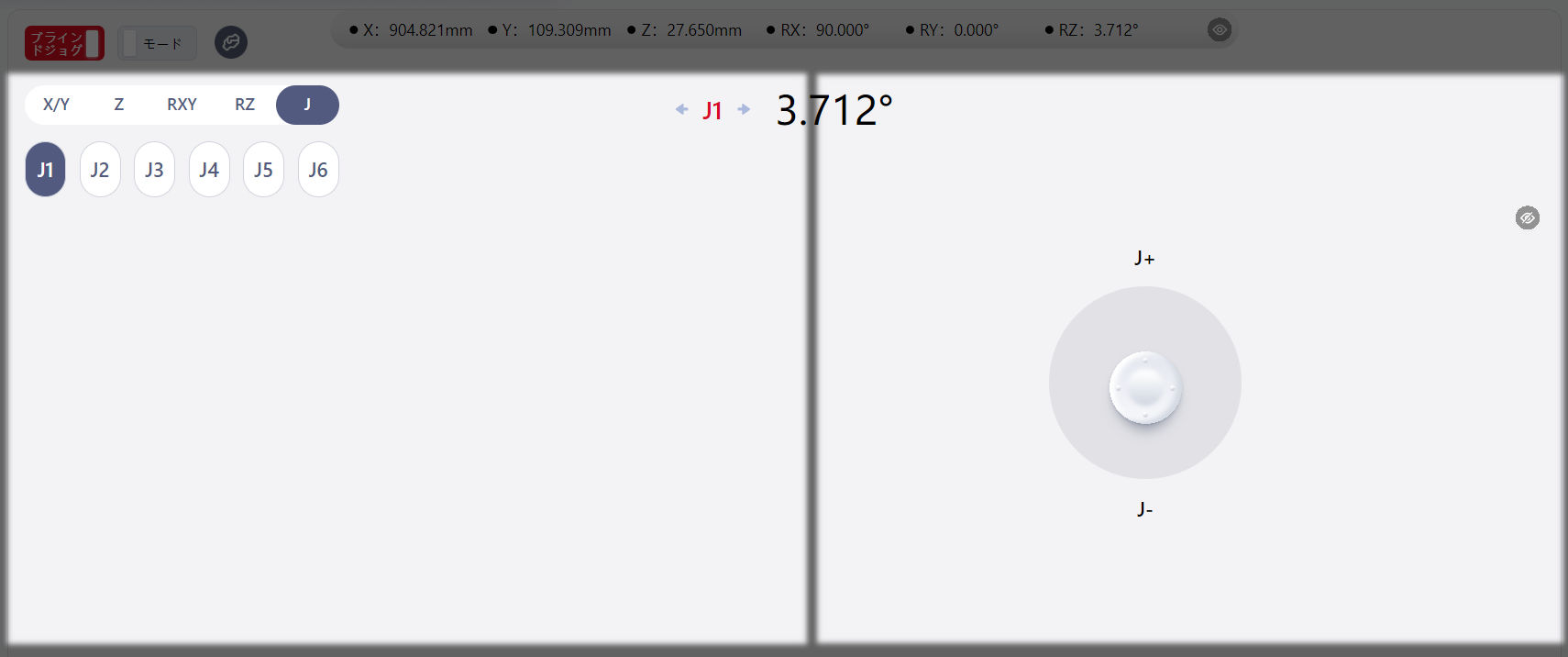
ジョイスティック操作エリア

インターフェースの左上にあるボックスで項目を選択します。この操作によって、ロボットが次に動く方向が決まります。
インターフェース上の任意の場所をクリックすると、ジョイスティックが表示されます。
ジョイスティック上でマウスを押し続け、任意の方向に動かすことでロボットを操作できます。ロボットは指定された方向に動きます。
マウスを離すとジョイスティックが消え、ロボットは動作を停止します。
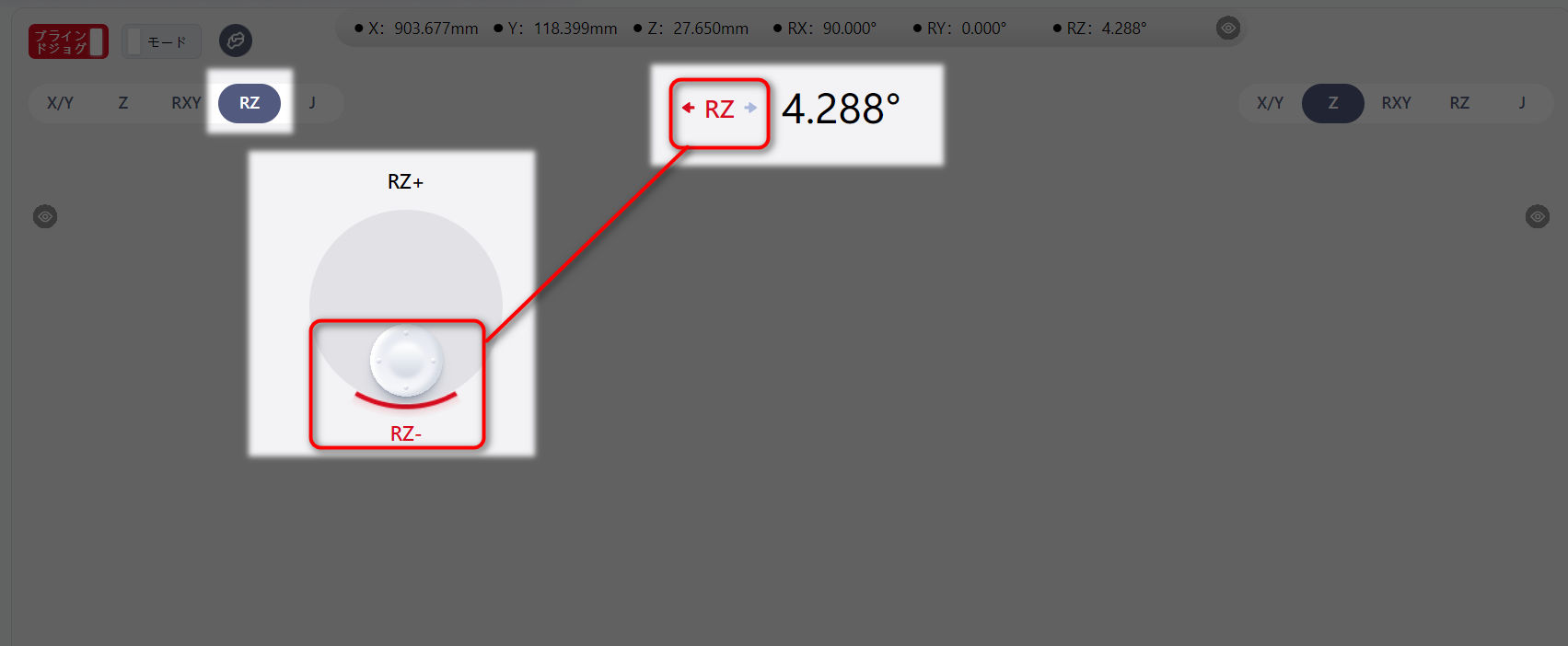
インターフェースの中央には、ロボットの現在の動作方向と具体的なパラメータが表示されます。
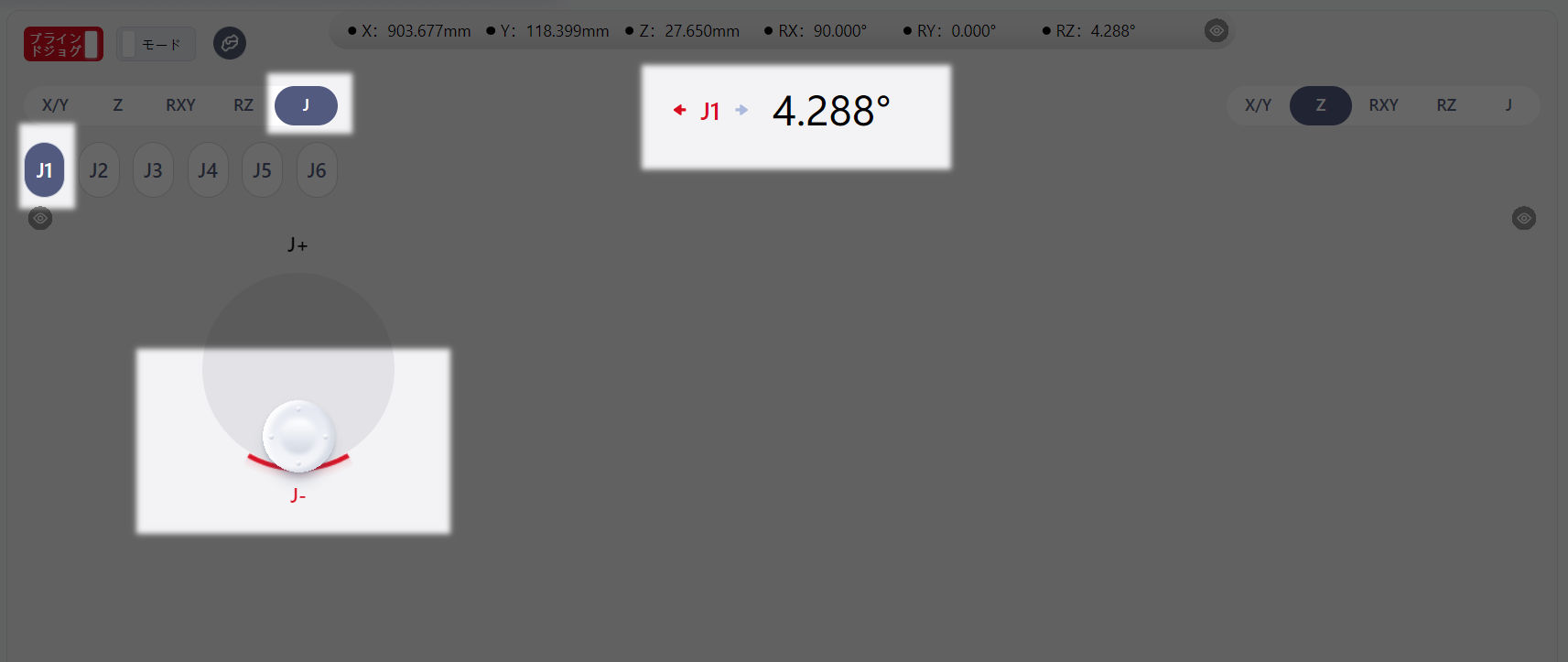
ジョイスティックは、関節の動きを直接制御するためにも使用できます。
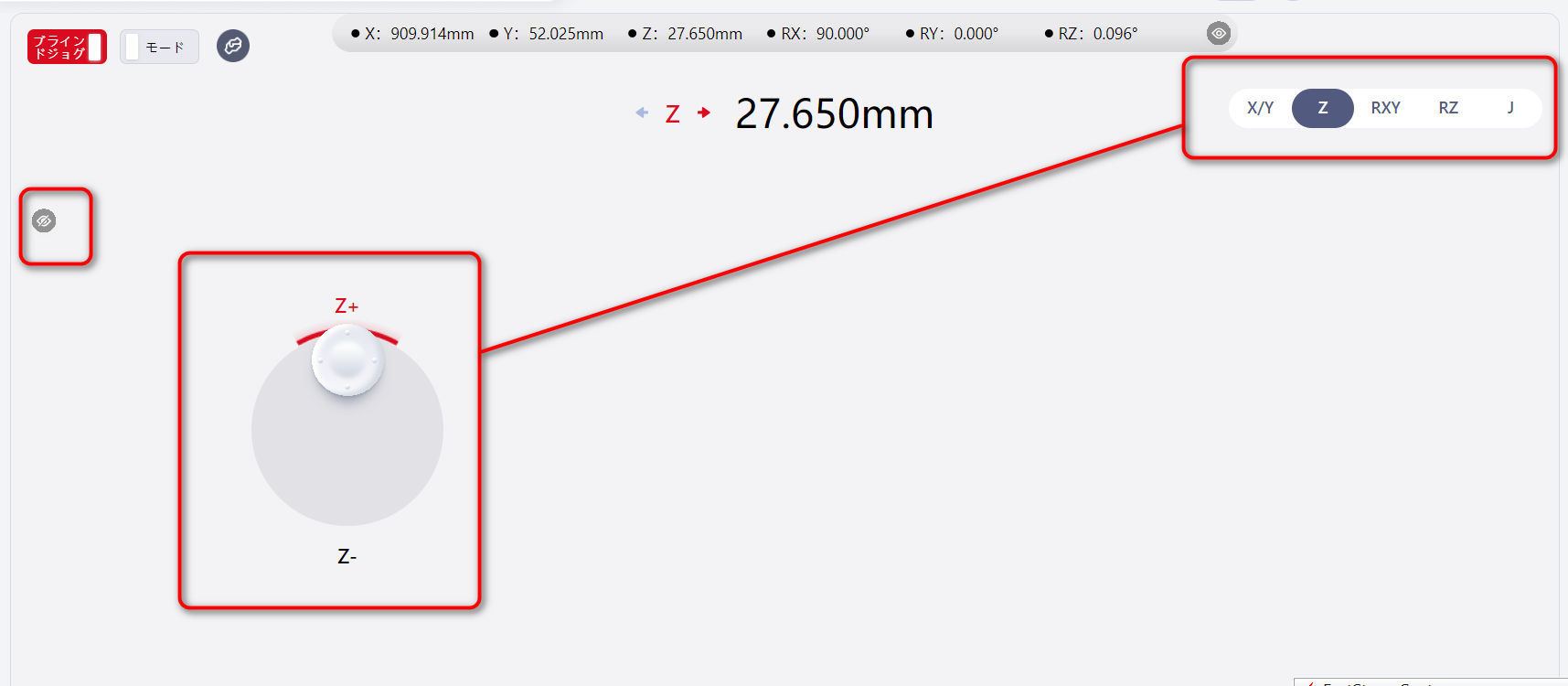
画像のように、ジョイスティック操作ゾーンの左側と右側の両方が操作をサポートしており、操作範囲は図で強調表示されています。
右側のゾーンの操作方法は、左側のゾーンと同じです。
目のアイコンをクリックすると、同じエリア内の移動方向選択ボックスが隠れます。
この時、該当エリアのジョイスティック機能も無効になり、他のエリアのジョイスティックがロボットの移動を制御します。その後、有効なジョイスティックエリアはページ全体に広がります。
上記のように、左側エリアの移動方向選択ボックスとジョイスティックが隠れ、右側のジョイスティックがページ全体の制御を行えるようになります。
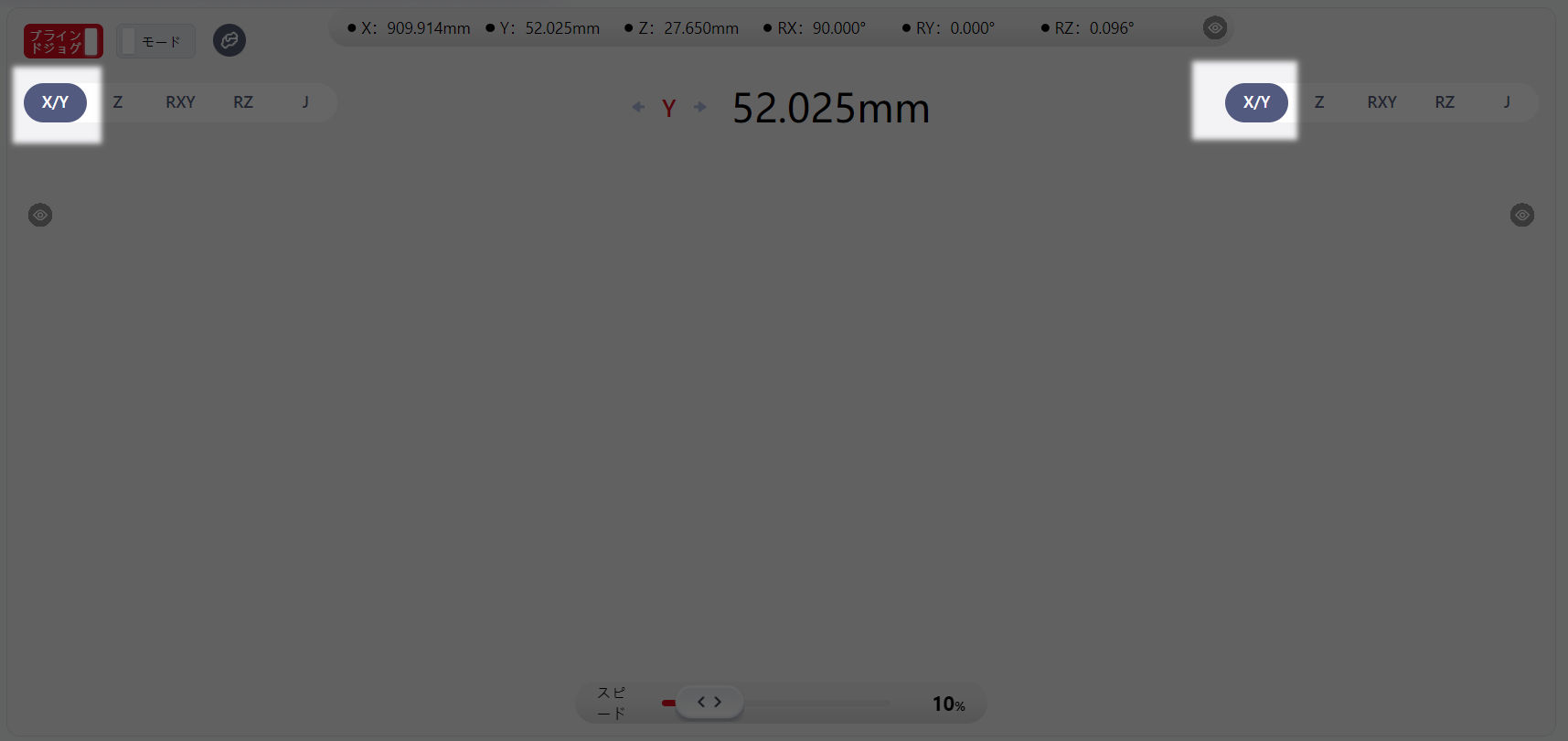
ユーザーは、左側と右側のページ上部のボックスで同じ方向を選択でき、左または右のジョイスティック操作エリアから選択した方向でロボットの移動を制御できます。
上記のように、左側と右側の両方にX/Y があり、ユーザーは左または右のジョイスティックエリアからX/Y方向でロボットの移動を制御できます。

ユーザーは異なる方向を選択することもできます。
上記のように、左側はJ-J3 に設定され、右側はRXY に設定されています。そのため、ユーザーは左側のジョイスティックエリアからロボットの第3関節の動きを制御し、右側のジョイスティックエリアからRXY方向でロボットの移動を制御できます。
注意:
左側と右側のエリアは同時に操作できません。
モデル表示
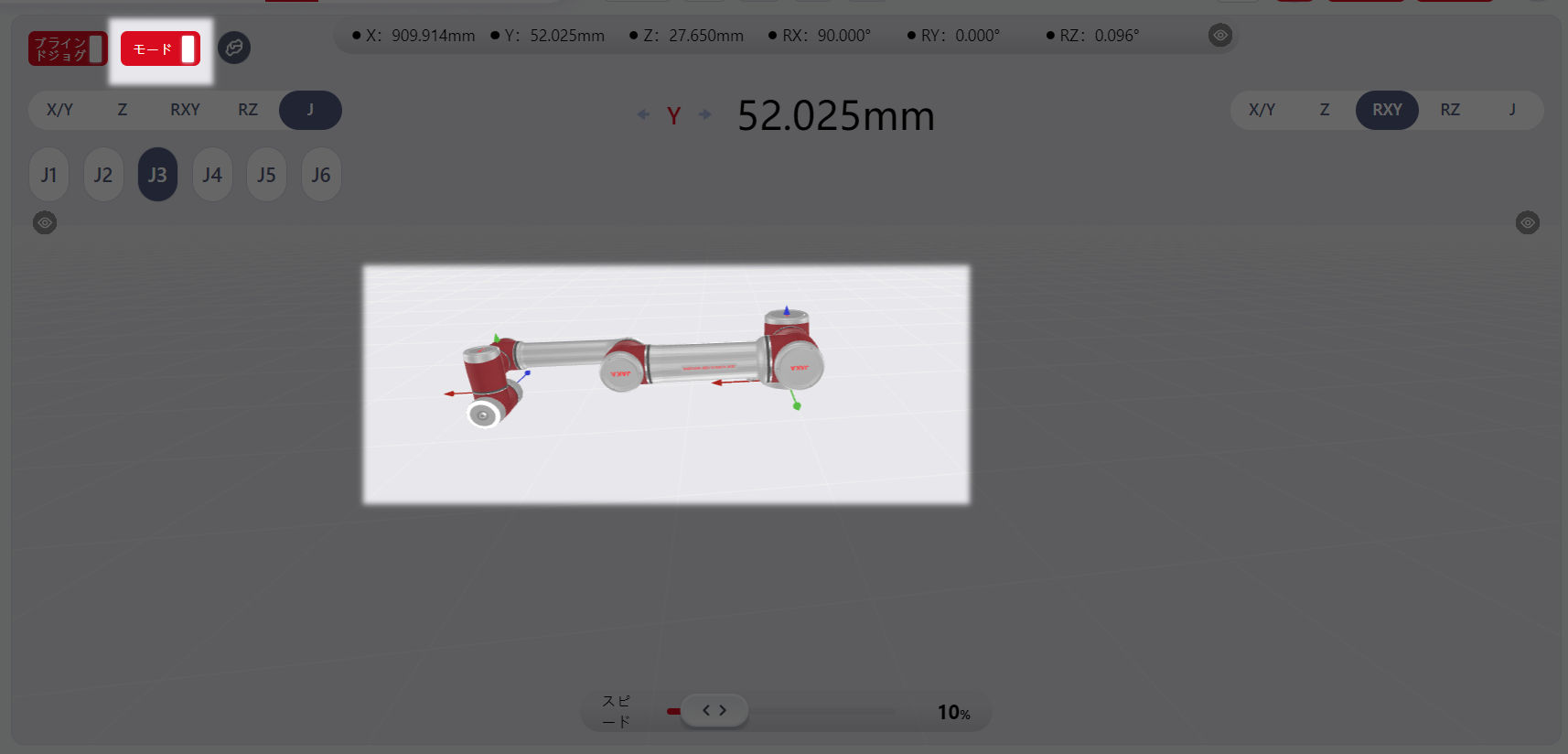
ブラインド操作 インターフェースに入ると、デフォルトではモデルは表示されません。
左上隅のモデル をクリックすると、ページの中央にロボットの3Dモデルが表示されます。このモデルは、現在操作中の実際のロボットまたは仮想ロボットに対応しています。
ロボットの近くのハイライトされたエリアにマウスを置き、マウスホイールをスクロールすると、ズームインおよびズームアウトが可能になり、ロボットの全体像や詳細を観察しやすくなります。
ロボットの近くのハイライトされたエリアにマウスを置き、左マウスボタンを押しながらマウスを移動させると、表示方向を変更でき、ロボットを360°観察するのが便利になります。
モデルが表示された後、両側のジョイスティック操作エリアはそれに応じて縮小されます。
力制御機能
ヒント
JAKAロボットは、エンドセンサーと連携することで、強化された力制御が可能です。
エンドエフェクタセンサーが接続されると、ツールドラッグ オプションが手動操作ページに表示されます。これをクリックすると、ツールドラッグモードに入ります。


注意:
- ツールドラッグを有効にする前に、ロボットの負荷が正しく設定されていることを確認してください。
- 方向、感触、反発力などのパラメータを設定する前に、ツールドラッグモードがオフになっていることを確認してください。
- ツールドラッグを有効にした後、システムはセンサーからの力値を確認します。もしそれらが3Nまたは0.2Nmを超えると(外部力を示す)、ポップアップが表示され、ツールドラッグを有効にするかどうかの確認が求められます。実際に外部力があるかどうかを確認し、あれば「確認」をクリックして続行してください。外部力が検出されない場合、センサーのゼロ点がずれている可能性があります。この場合、「キャンセル」をクリックして力表示ウィンドウに移動し、センサーをキャリブレーションしてください。
リアルタイム力表示
リアルタイム力表示 をトップナビゲーションバーから選択すると、ロボットのリアルタイムデータを確認できます。クリックすると、現在の接触力の値がリアルタイムで表示されるページが開きます。
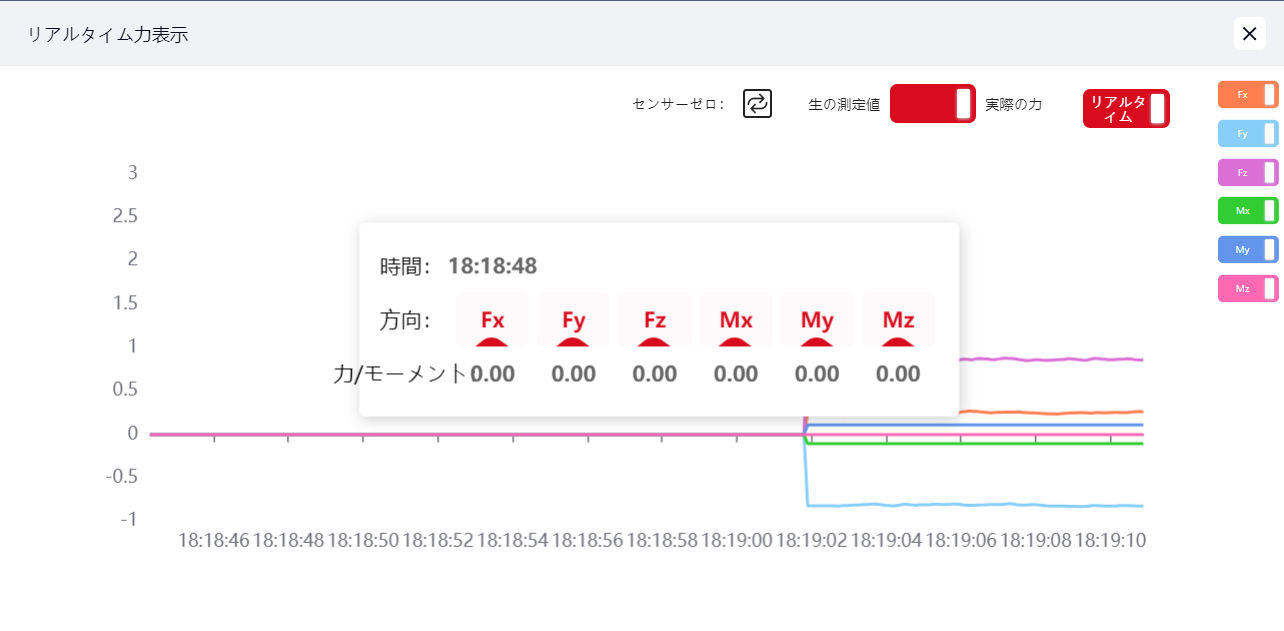
Fx、Fy、Fz、Mx、My、Mzのスイッチを切り替えて、対応する力データの曲線を表示できます。
リアルタイムのトグルがオンの場合、力の曲線は継続的に更新されます。オフの場合、曲線の更新は停止し、最後に記録された力の曲線が表示されます。曲線の任意のポイントをクリックすると、その瞬間の記録された力データを確認できます。
ツールドラッグ
ツールドラッグ をクリックすると、さまざまなパラメータやオプションを設定できる設定インターフェースに入ります。

方向
Fx、Fy、FzはX、Y、Z軸に沿った変位に対応し、Mx、My、MzはX、Y、Z軸周りの回転に対応します。
1つまたは複数の方向を選択でき、ツールドラッグが有効になると、選択した方向に沿ってロボットをドラッグすることができます。
フィール
フィール設定は、ツールドラッグモードでロボットを動かすために必要な力を決定します。フィール設定が硬いほど、ロボットをドラッグするために必要な力が大きくなります。Fx、Fy、FzはX、Y、Z軸に沿った変位に対応し、Mx、My、Mzはこれらの軸周りの回転に対応します。特定の方向のチェックボックスが選択されると、その方向のフィールスライダーが赤くなります。スライダーを調整してフィールの硬さを変更し、「確認」をクリックしてその方向でロボットのドラッグを有効にします。
デフォルトのフィール設定は30%です。
リバウンド
リバウンド設定は、ロボットがバネ効果をシミュレートすることを可能にします。ロボットが開始位置から遠くに移動するほど、ドラッグするために必要な力が大きくなり、放すとロボットはドラッグ前の初期位置に戻ります。
リバウンド値が高いほど、ロボットをドラッグするために必要な力と、放したときのリバウンド速度が増加します。
入力ボックスにリバウンド値を入力し、「確認」をクリックしてリバウンド機能を有効にします。デフォルトのリバウンド値は0で、最大値は100です。
リバウンド値を表示 チェックボックスを選択すると、リバウンドデータのリストが表示されます。
力制御座標系の選択
ツール座標系を選択すると、設定されたツール座標系内でロボットをドラッグできます。
ワールド座標系を選択すると、ロボットのワールド座標系内でロボットをドラッグできます。
警告:
- デバイスをインストールした後、ロボットを再起動したり、故障から回復したり、センサーが長時間電源が入っている場合は、フィールの硬さを硬めに設定することをお勧めします。テストを行い、故障がないことを確認した後に希望のレベルに調整してください。
- 実際のニーズに基づいてフィール設定を調整してください。設定があまりにも柔らかすぎると、ロボットが過度に敏感になり、外部の力で速度や加速度が過剰になり、システム全体の安定性が損なわれる可能性があります。

Sシリーズロボットがツールドラッグモードに入ると、マニュアル操作インターフェースでツールドラッグスイッチが有効になり、特異点警告、速度制限、関節のソフトリミット状態インジケータが表示されます。
リミットがトリガーされると、マニュアル操作インターフェースのインジケータライトが赤くなり、影響を受けた関節には赤いハローが表示されます。
ロボットが特異点や関節ソフトリミットに近づくと、ドラッグフィールは次第に硬くなります。ただし、リミットから離れると影響はありません。その間、ロボットのエンドリングインジケータが赤と黄色で点滅します。
ツールドラッグの特異点警告範囲は、フォースコントロール設定 - 高度な機能設定[]インターフェースで設定できます。特異点の位置については、JAKA Sシリーズハードウェアユーザーマニュアルを参照してください。
ロボットのエンドでTCPドラッグ速度が制限に達すると、加速が停止し、さらに加速しないように制限されます。ロボットのエンドリングインジケータが赤と黄色で点滅します。
フォースコントロールの速度制限は、フォースコントロール設定 - 高度な機能設定[]インターフェースで設定できます。
警告:
特異点やジョイントリミットに非常に近い姿勢でツールドラッグを有効にしないでください。このような姿勢では、ツールドラッグの許容範囲を超える可能性があります。安全制限により、ツールドラッグが有効でもロボットをドラッグすることはできません。
その場合、ツールドラッグを有効にする前に、ジョイントモーションを使用して特異点やジョイントリミットから離れるようにしてください。