手动
手动

点击该图标进入手动控制界面。
手动控制界面可分为三大功能区:仿真模型区、操作区、盲操功能区,如下图所示。
仿真模型区

此区的具体功能包括:
盲操按钮
点击该按钮可进入盲操模式,具体功能介绍详见 盲操功能区。
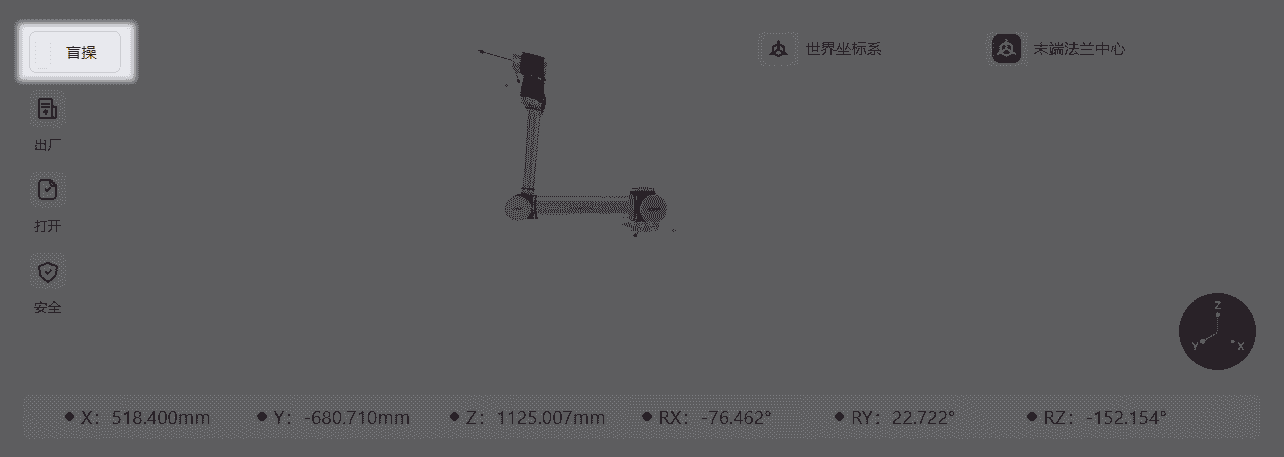
姿态快捷恢复按钮

长按该区的三个按钮,可恢复至机器人的出厂姿态、打开姿态和安全姿态。

长按时,按钮为红色,机器人会自动运动,停止运动时即代表已到达相应姿态。
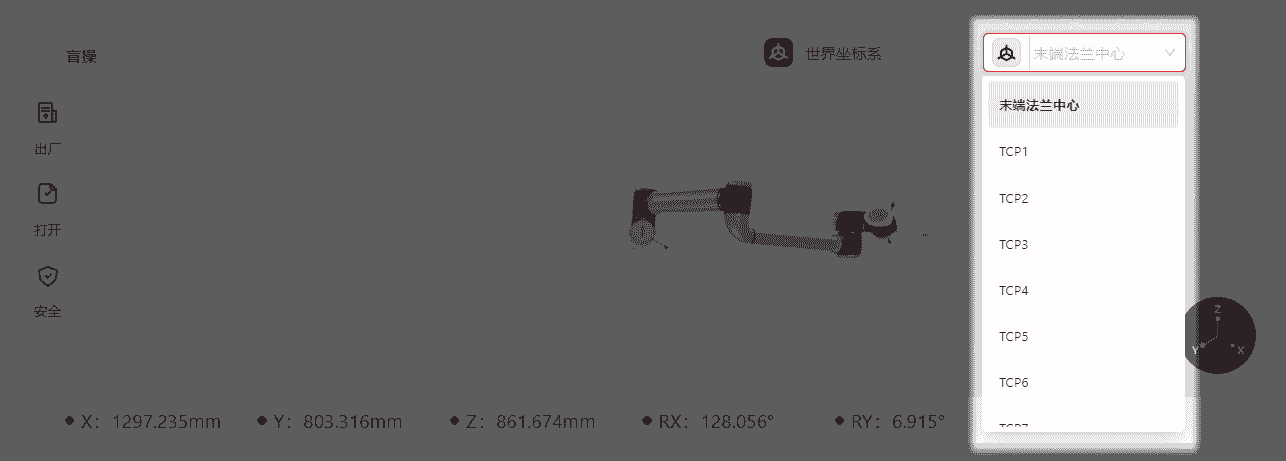
切换坐标系

此处可切换当前机器人在笛卡尔空间JOG运动时的世界(用户)坐标系和工具坐标系。
图标为红色时表示当前处于该坐标系中。点击下拉框可选择不同的世界(用户)坐标系和工具坐标系(对于这两种坐标系的设置详见 设置 界面)。

仿真模型展示区

此区的三维模型与用户所连接的真机、虚拟机一致,能反映机器人的实时实际运动或模拟仿真运动。
鼠标停在该区的任意一个位置、滚动鼠标滚轮,可拉远或缩进视野,更方便观察机器人的全景或细节;
鼠标停在该区的任意一个位置、长按鼠标左键的同时移动鼠标,可变换视野方向,更方便360°观察机器人。
右下角的圆形图标显示了X、Y、Z轴分别由哪种颜色指代,以便用户更清楚地判断机器人当前运动情况。
参数显示区
该区显示了机器人真机或模型在运动时,工具坐标系在世界(用户)坐标系中的位姿。
操作区
用户可在操作区通过 空间调节、关节调节 和 参数调节 的方法来控制机器人运动。
- 在版本172中,手动操作区的速度默认为10%:
由其他页面(比如编程页面)进入手动操作页面时,此处的速度也依然默认为10%
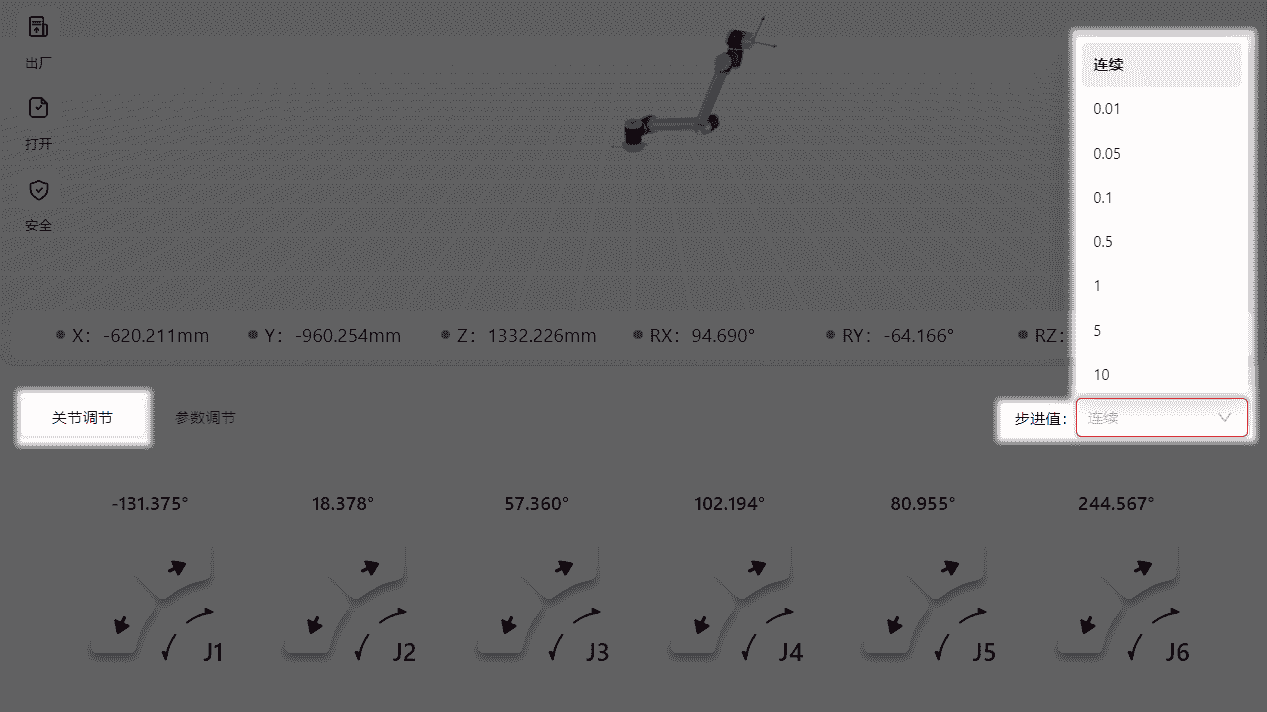
- 版本172支持
步进值的自定义功能。
选择 自定义 后,用户可在此处输入数值(仅能输入数字和点),范围为0-100,可精确到小数点后两位:

- 版本172新增 Zu 20的
反向驱动功能:
在此模式下,机器人关节制动器释放,可用较小的力拖动关节。
当发生碰撞时,反向驱动功能可在机器人下使能状态下单独释放特定关节的制动器、将此关节运动至目标位置,无需释放整个机器人制动器。
点击 更多 ,出现操作按钮;
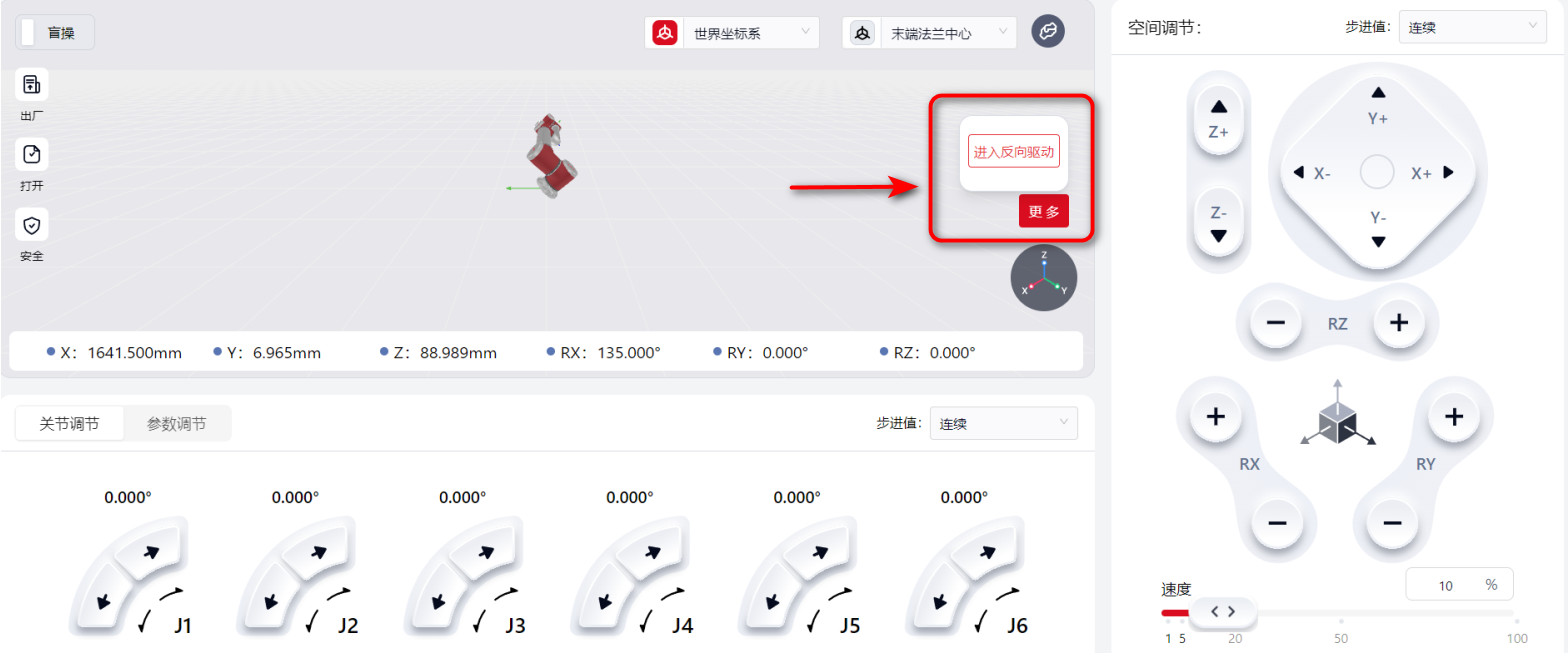
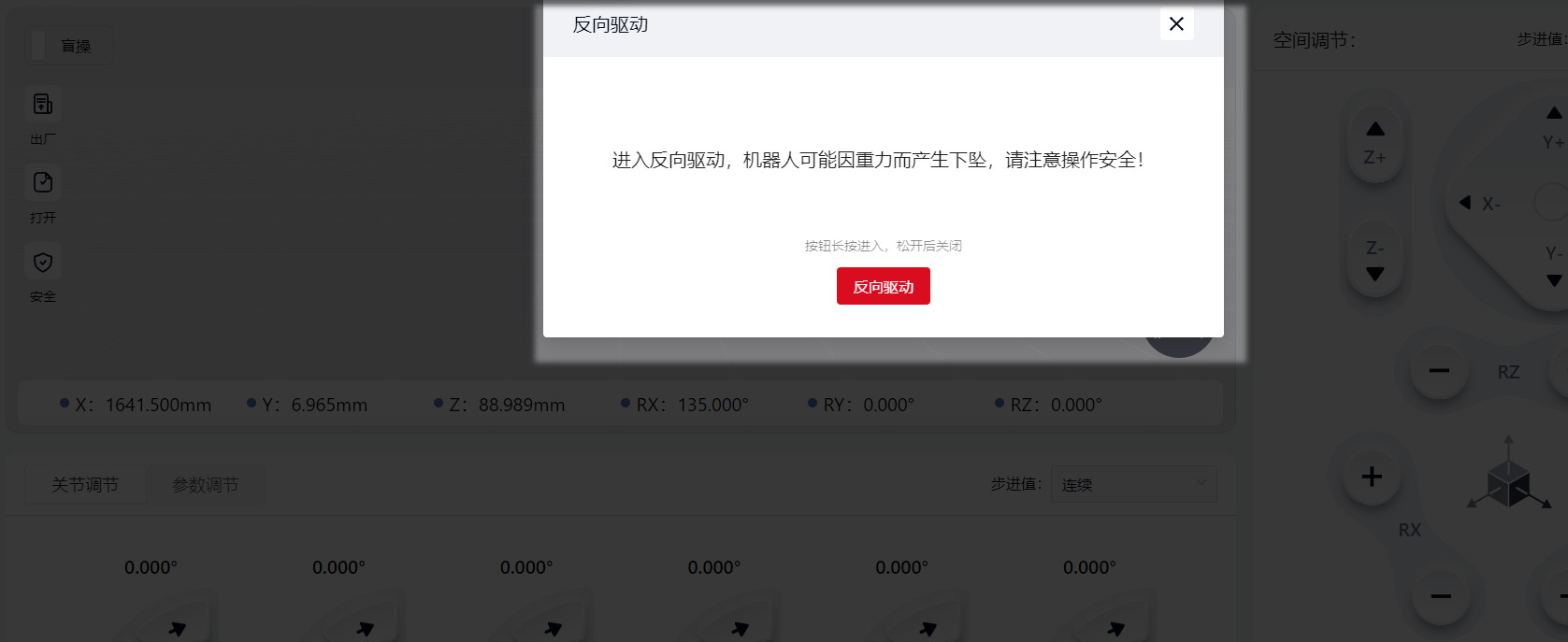
长按 反向驱动 ,机器人进入反向驱动模式,用户可拖动需要移动的关节迫使关节移动。
注:
机器人需处于上电下使能的状态,才可进入反向驱动模式。
机器人处于反向驱动模式中、当关节运动速度超过50°/s时,视为机器人超速,系统将退出反向驱动模式。
警告:
机器人处于反向驱动模式时,释放制动器的关节会在重力作用下快速下坠,因此在释放制动器前务必对机器人本体和安装在机器人上的工具和工件提供有效支撑。
- 版本172新增
一键姿态调整功能:
该功能支持快速调整机器人末端法兰至特定角度,操作方式如下:
点击 更多 ,出现操作按钮;

点击 X/Y/Z轴 按钮切换参考坐标轴;
长按 一键同向/一键反向 按钮,则机器人末端法兰坐标系的某一坐标轴(刚才所选的X/Y/Z轴)将以手动操作界面当前使用的坐标系的同一坐标轴为参考,调整法兰姿态至目标姿态。

X/Y/Z轴 :X轴,Y轴,Z轴。参考坐标系和末端法兰坐标系的X、Y或Z轴。
一键同向/一键反向 :一键同向,一键反向。一键同向即参考坐标系和末端法兰坐标系所选坐标轴方向相同,一键反向即 参考坐标系和末端法兰坐标系所选坐标轴方向相反。
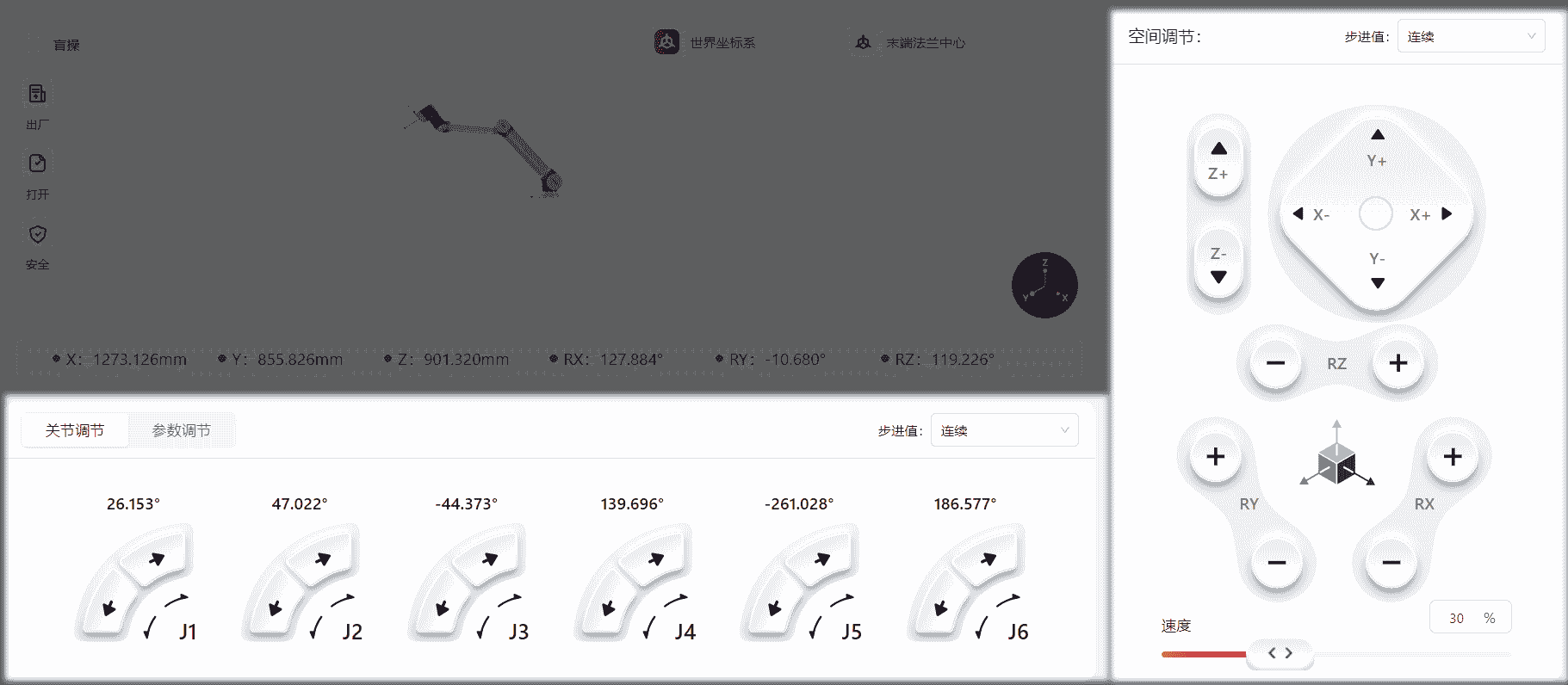
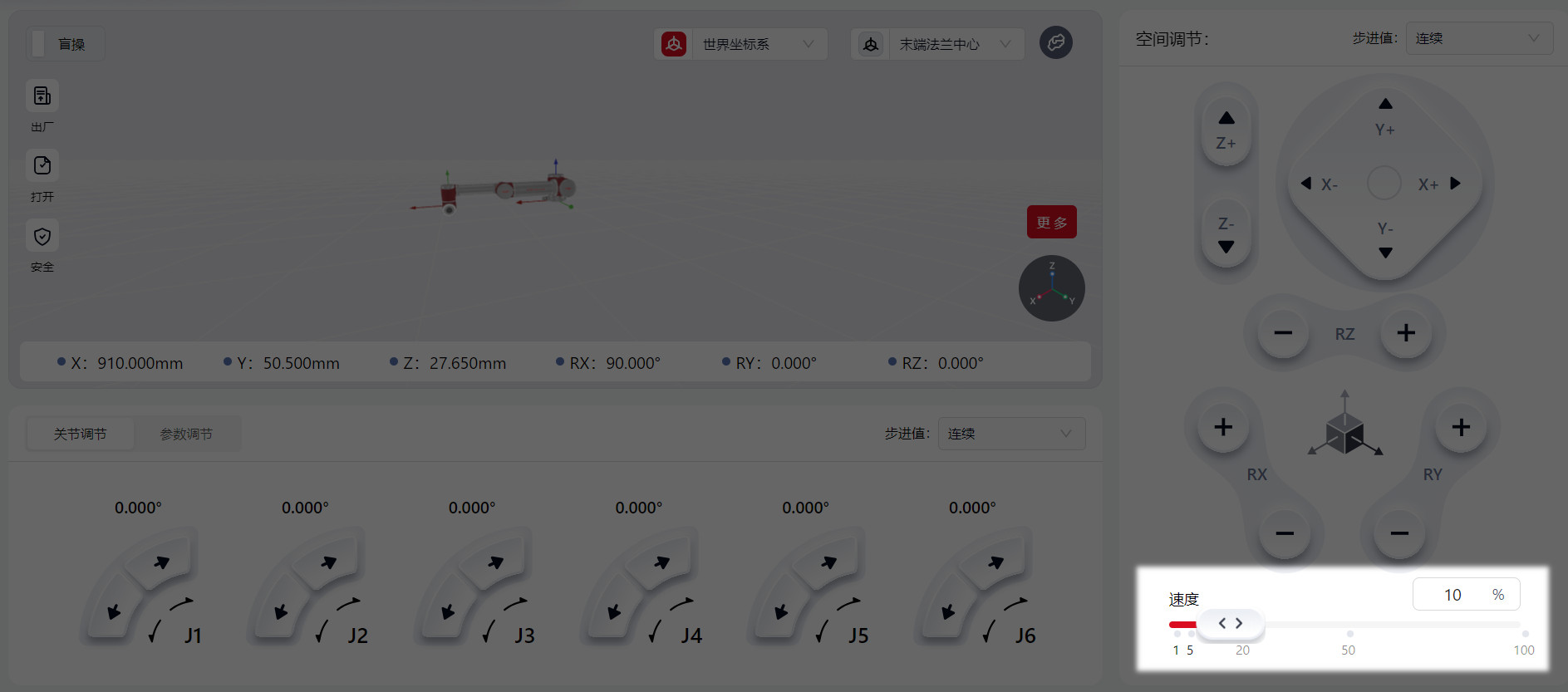
空间调节
指控制机器人的工具坐标系原点在世界(用户)坐标系(即笛卡尔空间)中,进行步进或连续运动。
长按或点按界面中的虚拟摇杆,此时所按摇杆为红色,表示操作生效、机器人在运动中;松开摇杆,此时摇杆为灰色,机器人即停止运动。
可在 步进值 设置机器人进行连续运动或按具体数值进行步进运动;
可在 速度 设置机器人运动速度,拖动滑动按钮、点击数值,或直接在框中输入具体数值(1-100)皆可实现该操作。

关节调节
指控制机器人的各个关节做相互独立的步进或连续运动。
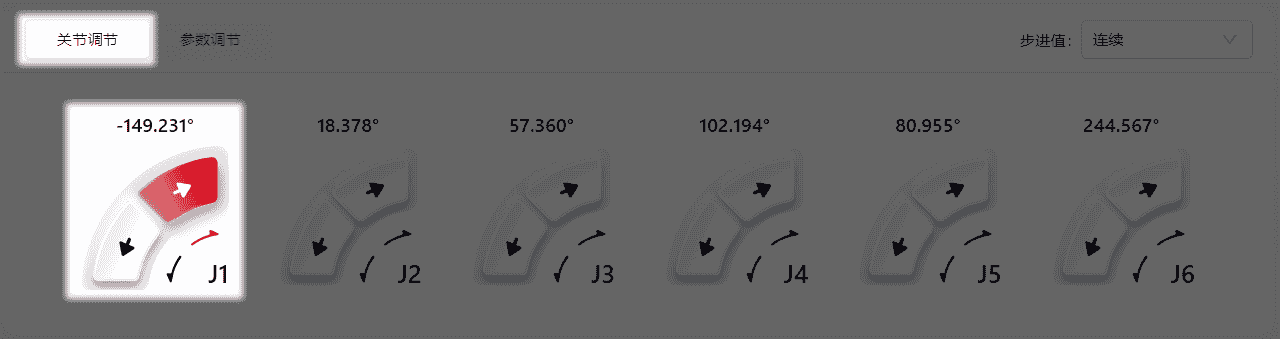
长按或点按界面中的虚拟摇杆,此时所按摇杆为红色,表示操作生效、机器人在运动中;松开摇杆,此时摇杆为灰色,机器人即停止运动。
可在 步进值 设置机器人进行连续运动或按具体数值进行步进运动;
可在 空间调节-速度 设置机器人运动速度,拖动滑动按钮或直接在框中输入具体数值(1-100)皆可实现该操作。
参数调节
指用户可以通过输入具体 工具坐标位置 或具体 关节位置 的方式,控制机器人到达指定位置。
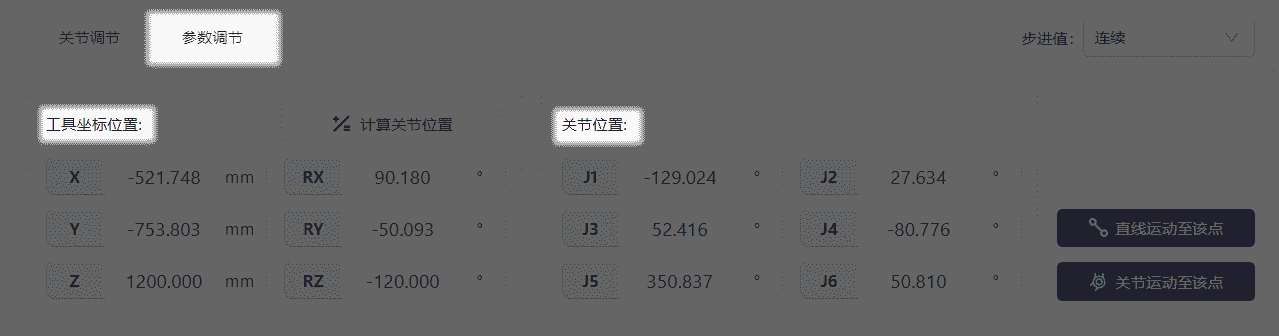
工具坐标位置

在代表不同轴的框内输入具体数值后,点击 计算关节位置,再长按 直线运动至该点 或 关节运动至该点 (长按时按钮为红色)使机器人运动至指定位置。机器人到达指定位置后自动停止。
注:
在设置工具坐标位置的时候,需同时注意设置坐标系。
可在 空间调节-速度 设置机器人运动速度,拖动滑动按钮或直接在框中输入具体数值(1-100)皆可实现该操作。
关节位置
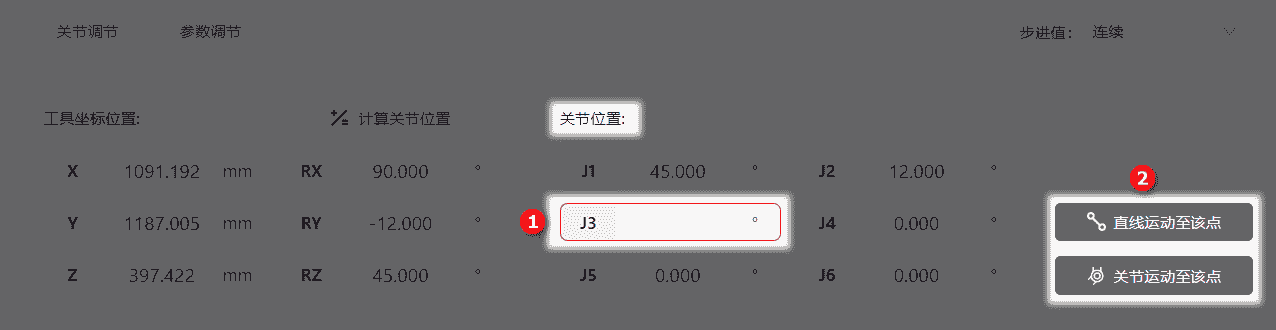
在代表不同关节的框内输入具体数值后,长按 直线运动至该点 或 关节运动至该点 (长按时按钮为红色)使机器人运动至指定位置。机器人到达指定位置后自动停止。
可在 空间调节-速度 设置机器人运动速度,拖动滑动按钮或直接在框中输入具体数值(1-100)皆可实现该操作。
盲操功能区

点击 盲操 进入盲操功能区界面。
注:
开启盲操功能后,在该界面外设置的世界(用户)坐标系和工具坐标系依然生效。
位姿参数显示与速度调节

页面上方显示了机器人运动的实时位姿参数,可点击眼睛图标隐去参数显示,也可再次点击眼睛图标重现参数。
页面下方可拖动滑钮以调节机器人运动的速度。
摇杆控制区
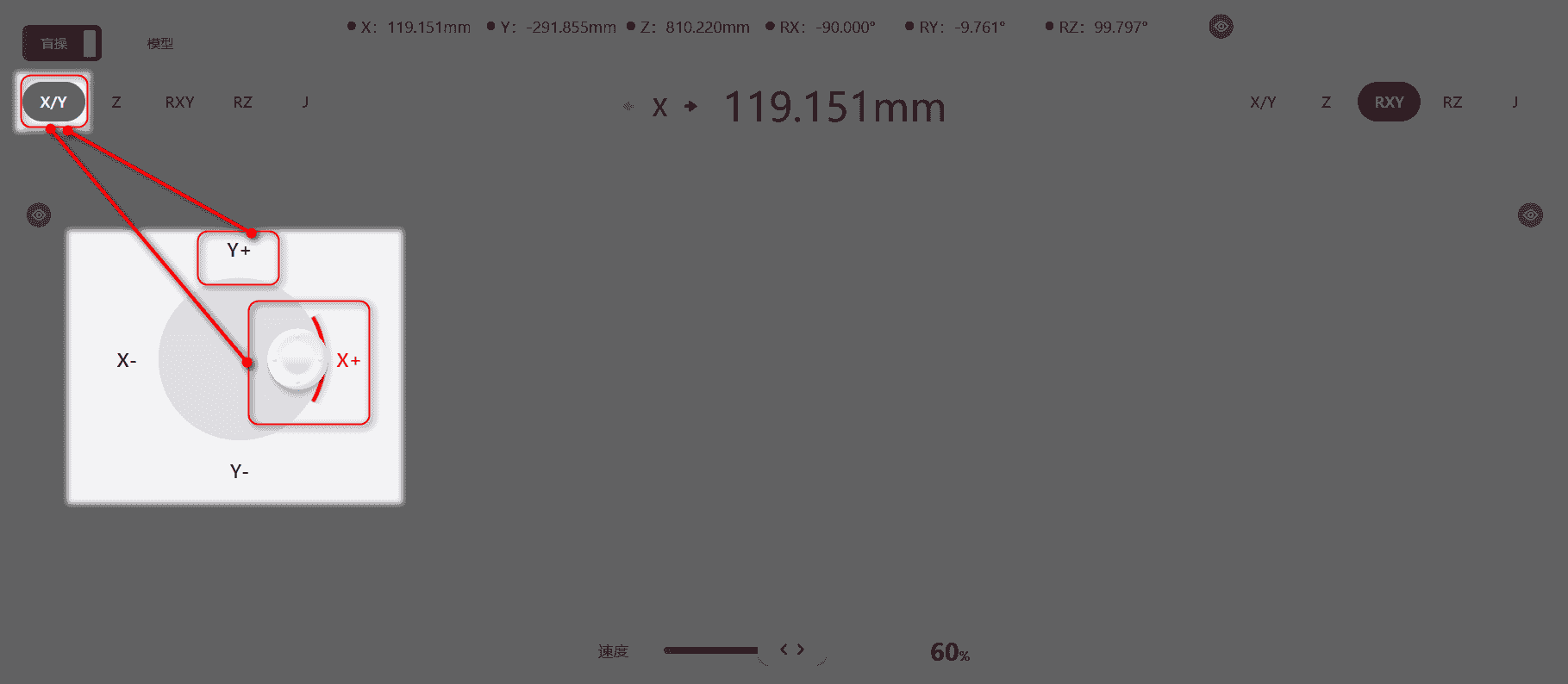
在界面左上方的方框中选择任一项,此操作为确定接下来机器人移动的方向;
鼠标点击界面任一地方,摇杆出现;
长按鼠标往摇杆上任意方向移动以控制机器人,机器人按指定的方向运动;
松开鼠标,摇杆消失,机器人即停止运动。
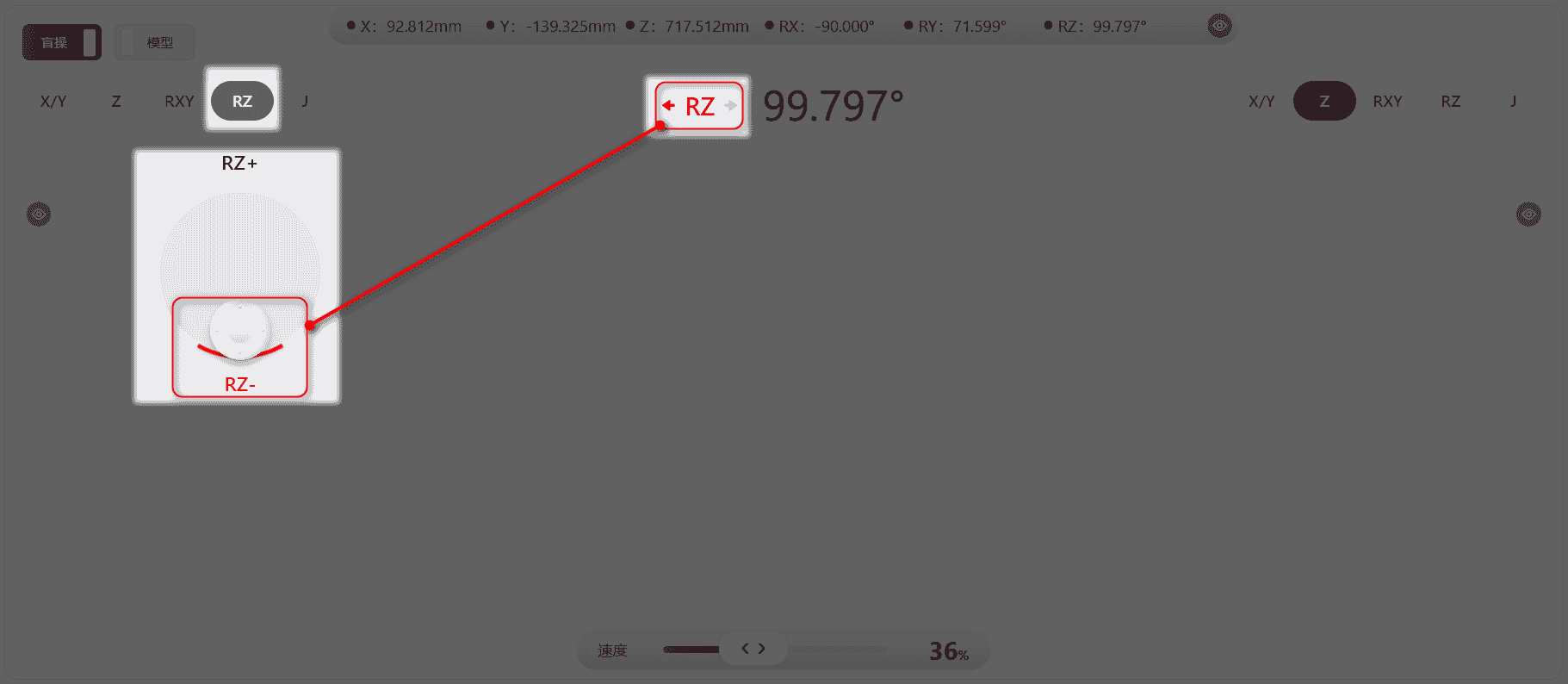
界面中间会显示此时机器人移动的方向与具体参数。
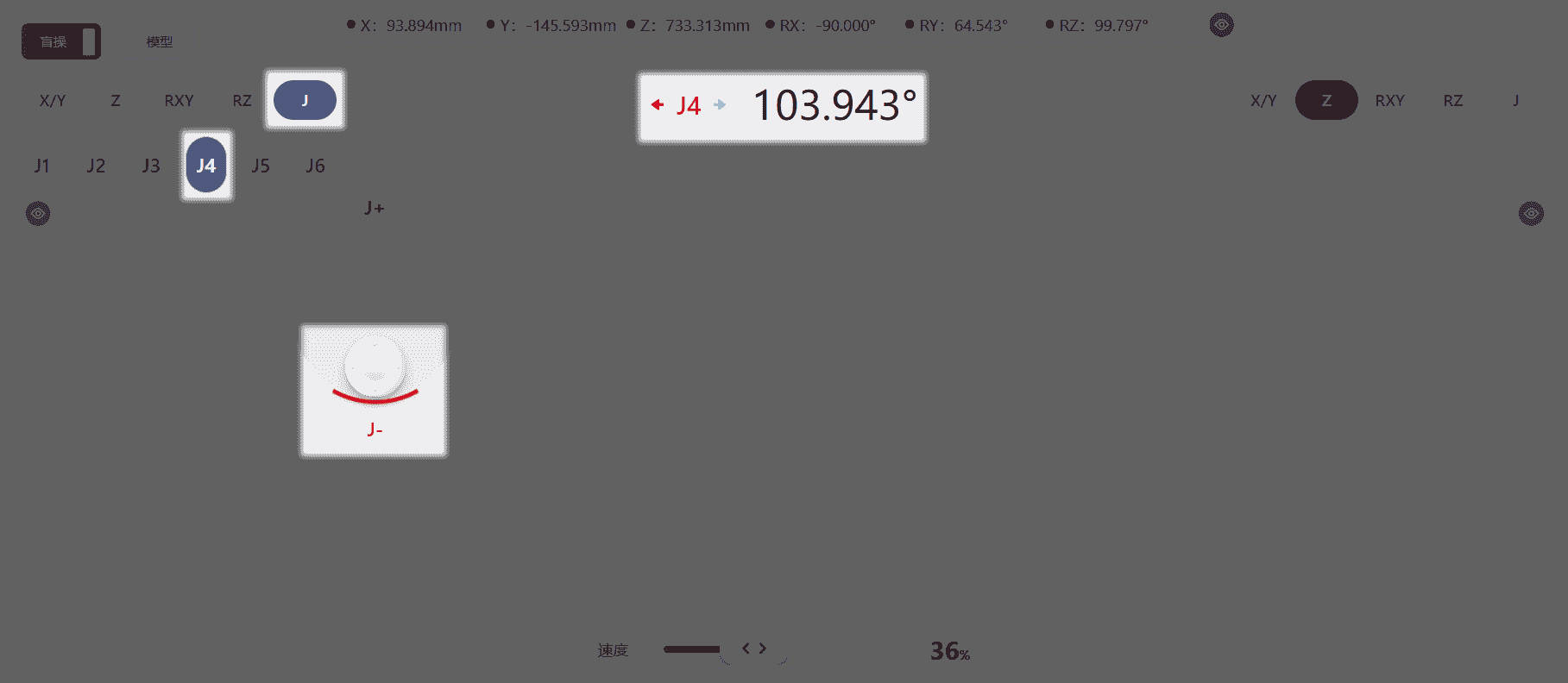
也可直接用摇杆控制关节运动。
如图所示,摇杆控制区的左右两区都支持操作,操作范围如图中高亮部分所示。
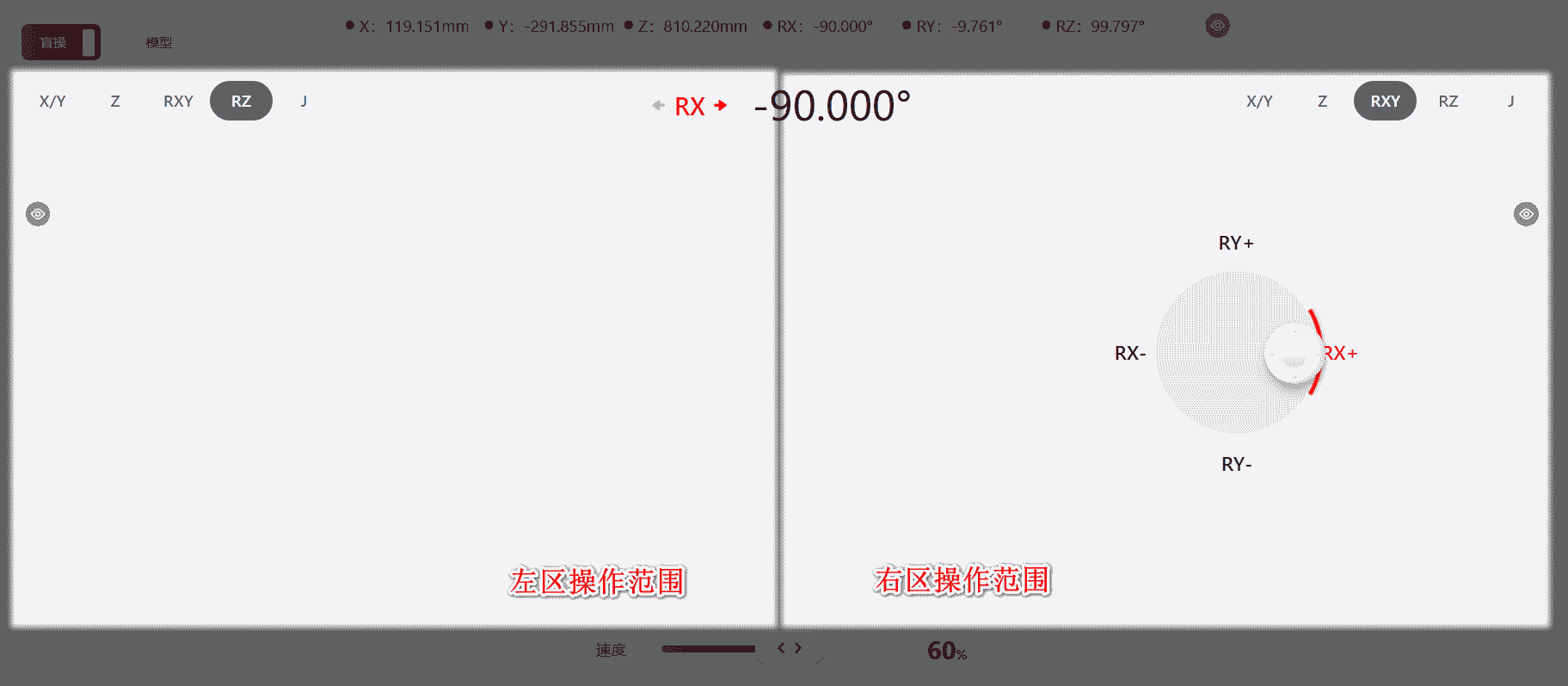
右区的操作方法与左边相同。
可点击眼睛图标隐去同一区的移动方向选择框。
此时,该区的摇杆功能也相应失效,由另一区的摇杆控制机器人运动,摇杆有效区为整个页面。
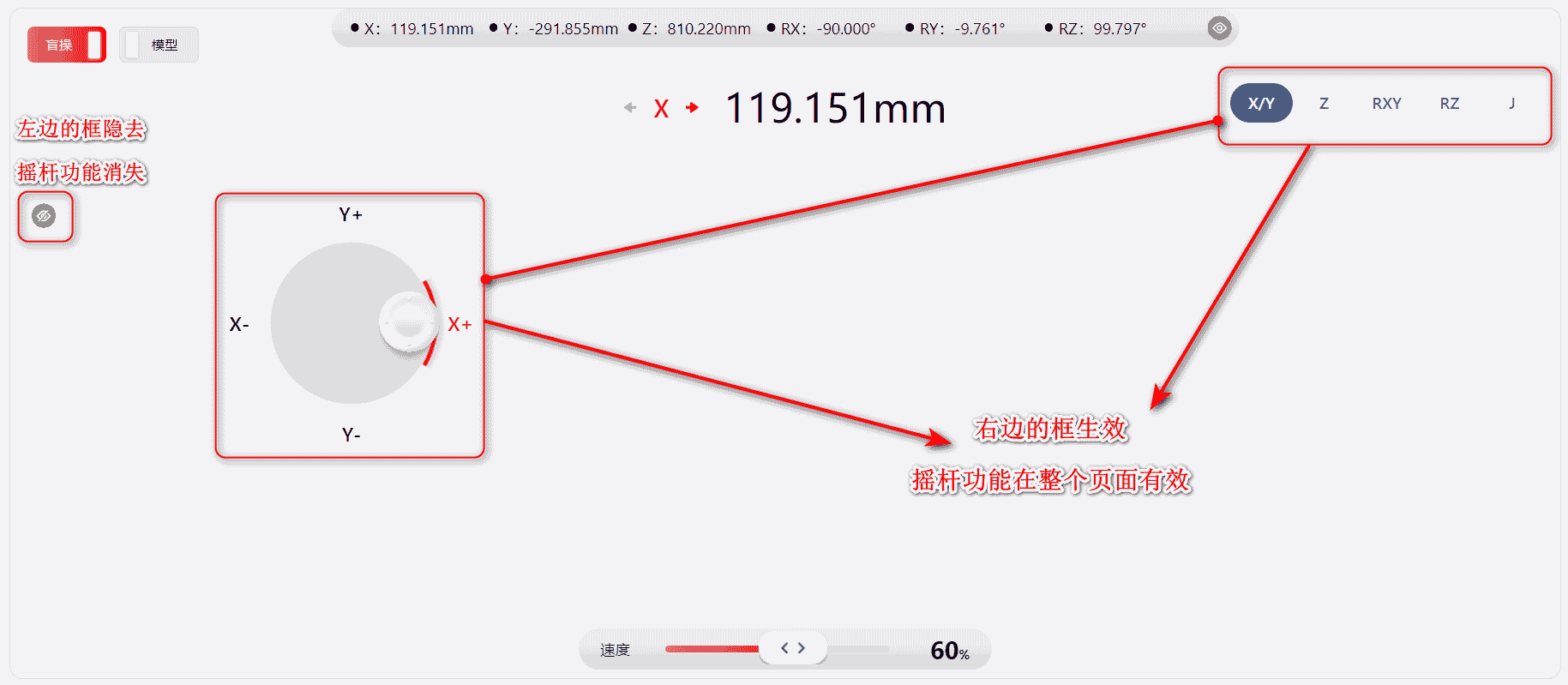
如上图所示,此时左区的移动方向选择框和摇杆均隐去,由右边的摇杆操控整个页面。

用户可在左右两边页面上方的方框中选择同样的方向,此时用户可在左边或右边的摇杆操作区控制机器人往所选方向移动。
如上图所示,此时左右两边都选择了 X/Y ,所以用户可在左边或右边的摇杆区操作机器人往X/Y方向移动。

用户也可选择不同的方向。
如上图所示,此时左边选择的方向为 J-J3,右边选择的方向为 RXY,所以用户可在左边的摇杆区操作机器人的第三关节运动,在右边的摇杆区操作机器人往RXY方向运动。
注:
左、右两区不可同时操作。
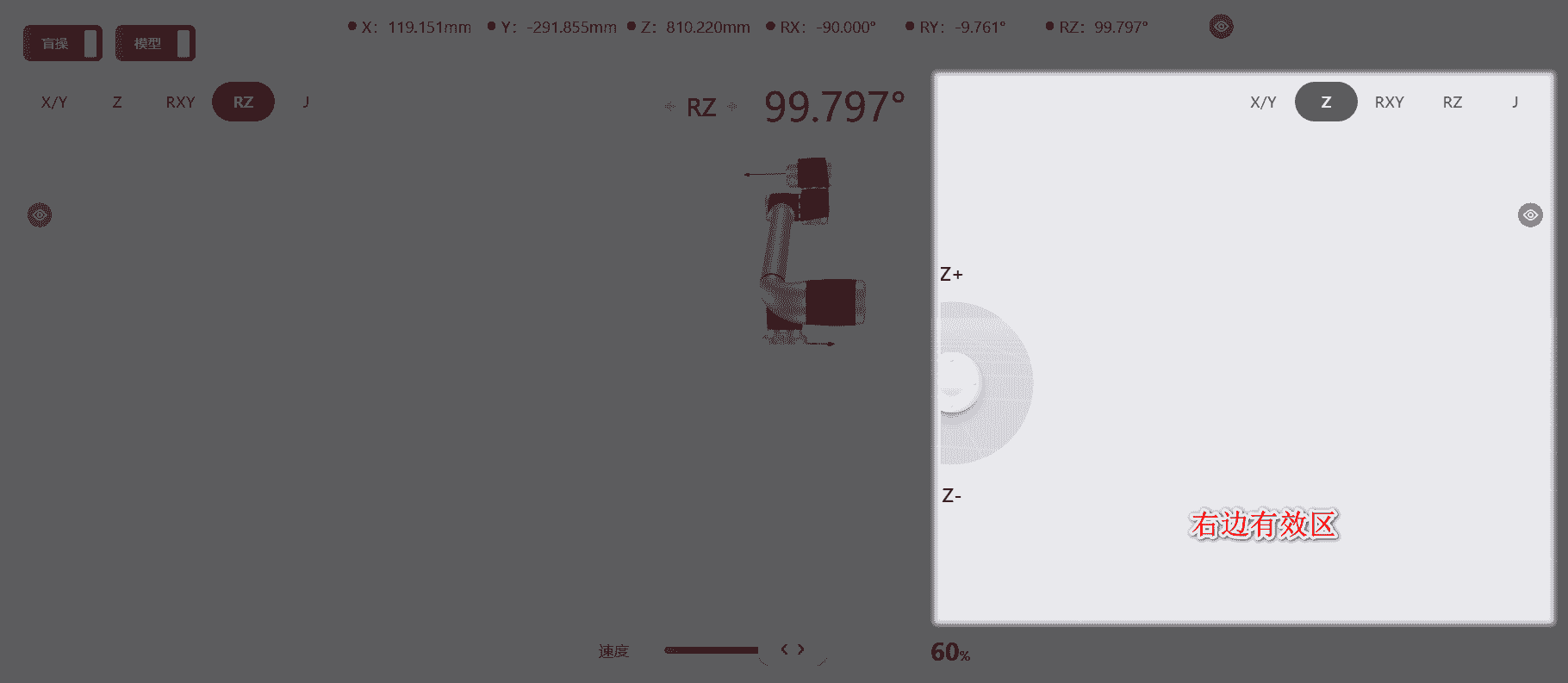
显示模型

刚进入 盲操 界面时,默认不显示模型。
点击左上角 模型 可在页面中间显示出机器人三维模型,该模型与此时操作的真机、虚拟机一致。
鼠标停在机器人附近高亮区的任意一个位置、滚动鼠标滚轮,可拉远或缩进视野,更方便观察机器人的全景或细节;
鼠标停在机器人附近高亮区的任意一个位置、长按鼠标左键的同时移动鼠标,可变换视野方向,更方便360°观察机器人。
模型显示后,左右两边摇杆的操作区会相应缩小,具体范围如图:

力控功能
提示
JAKA机器人可搭配末端传感器使用。
当连接了末端传感器时,在手动操作页面会出现 工具拖拽 ,点击可进入该模式。


注意:
- 开启工具拖拽前,请确保机器人负载已经正确设置。
- 配置方向、手感、回弹等参数前,需确保工具拖拽状态已关闭。
- 开启工具拖拽后,系统会校验传感器力值,若大于3 N或0.2 Nm(传感器存在外力),则弹窗提示是否仍要开启工具拖拽。请确认实际是否存在外力,如果确实存在外力,可以点击“确定”继续开启工具拖拽;如果不存在外力,可能是由于传感器零点发生变化,请点击“取消”跳转至力值显示的窗口查看此时的传感器力值并进行校零。
实时力显
在顶部导航栏可通过 实时力显 查看机器人的实时数据,点击后,跳出的页面会实时显示接触外力值。

可以操作显示了Fx、Fy、Fz、Mx、My、Mz拨钮开关来选择是否显示对应的力数据曲线。
实时拨钮开关若处于开启状态,则会连续刷新实时显示力曲线;若处于关闭状态,则会停止刷新,显示最后记录的一组力曲线数据,点击图线上的圆点可显示圆点处记录的力数据。
工具拖拽
点击 工具拖拽 可进入具体的配置界面设置相关参数及选项:

方向
Fx、Fy、Fz对应X、Y、Z三个方向的位移,Mx、My、Mz对应X、Y、Z三个方向的旋转;
可勾选某个或某几个方向,即打开工具拖拽功能后,能在勾选的方向上拖拽机器人。
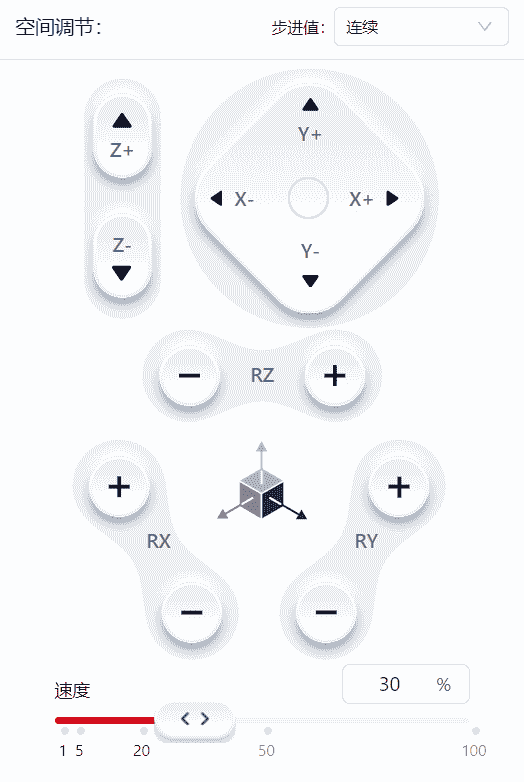
手感
手感决定工具拖拽模式下拖动机器人所需力的大小,手感设置越硬,拖动机器人所需力越大。其中Fx,Fy,Fz对应X,Y,Z三个方向的位移,Mx,My,Mz对应X,Y,Z三个方向的旋转。勾选某个方向前的选框后,此方向的手感滑动条变为红色,拖动滑动条调整手感软硬,点击“确定”,此时可在此方向上拖拽机器人。
默认手感为30%。
回弹
设置回弹可以使机器人模拟弹簧效果,即:若机器人离开起始点越远,拖拽机器人所需的拖拽力就越大,并在松手后让机器人回到拖拽之前的最初位置。
该值设置得越大,拖拽机器人所需的力就越大,松手后机器人回弹的速度也越快。
在输入框中输入回弹数值,点击“确定”,回弹功能生效。默认回弹值为0,最大回弹值为100。
勾选 显示回弹数值 前的选框,显示回弹数据列表。
力控坐标系选择
勾选工具坐标系,则在设置的工具坐标系中拖拽机器人;
勾选世界坐标系,则在机器人世界坐标系中拖拽机器人。
警告:
- 设备安装完成后,机器人再次启动后,从故障中恢复后,或传感器长时间通电后,建议将手感设置的较硬,测试确认没有故障后,再调整为所需的大小。
- 请依据实际使用需要设置合适的手感,手感设置过软可能导致机器人过于灵敏,在外力影响下运动速度和加速度过大,不利于机器人系统的整体稳定性。
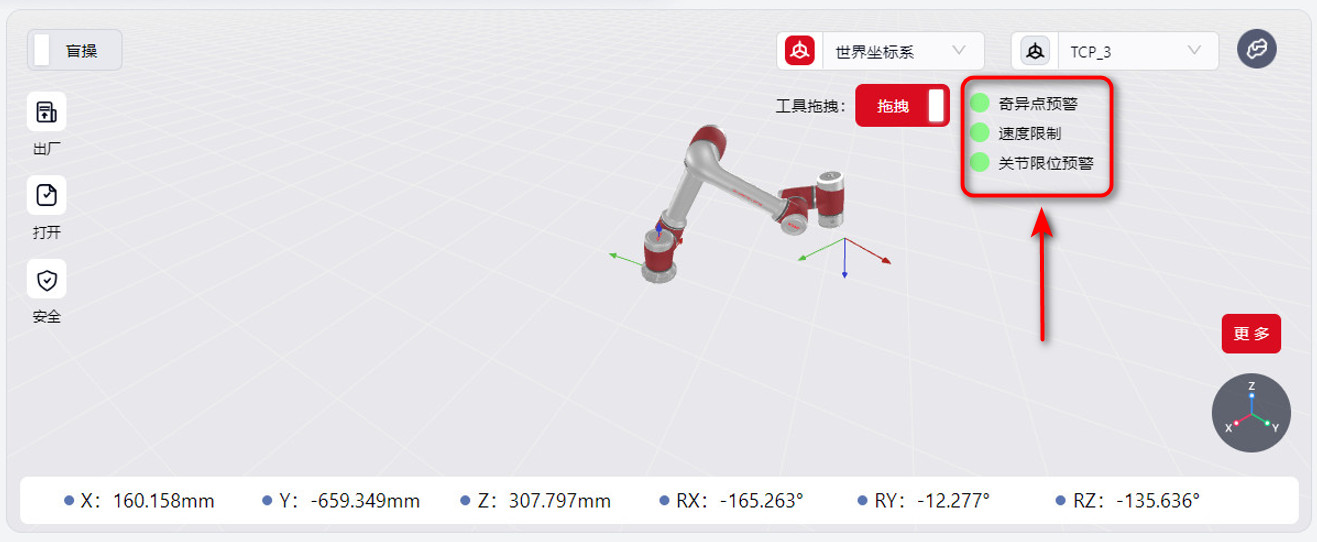
S系列机器人进入工具拖拽模式后,手动操作界面的工具拖拽开关开启,并显示奇异点预警、速度限制、关节软限位限制状态指示灯。
触发限制时,手动操作界面指示灯变为红色,触发限制的关节外圈显示红色光圈。
当机器人靠近奇异点和关节软限位限制时,工具拖拽手感随着机器人离奇异点或关节限位越来越近而越来越硬,但机器人向远离限制的方向运动时将不受影响。同时,机器人末端环形指示灯红黄闪烁。
可在力控配置-进阶功能配置界面设置拖拽奇异点预警范围,奇异点位置见 JAKA S 系列硬件用户手册。
当机器人末端TCP拖拽速度达到限制时,将被限制在此速度不允许继续加速,机器人末端环形指示灯红黄闪烁。
可在力控配置-进阶功能配置界面设置力控限速。
警告:
请不要在距离奇异点或关节限制非常近的姿态开启工具拖拽,因为这种姿态可能已经超过了工具拖拽能够允许的范围,因为安全限制的作用,此时即使开启工具拖拽也无法拖动机器人。
在这种情况下,请先通过关节运动远离机器人的奇异点或关节限位姿态再开启工具拖拽。