I/O パネル
I/O パネル
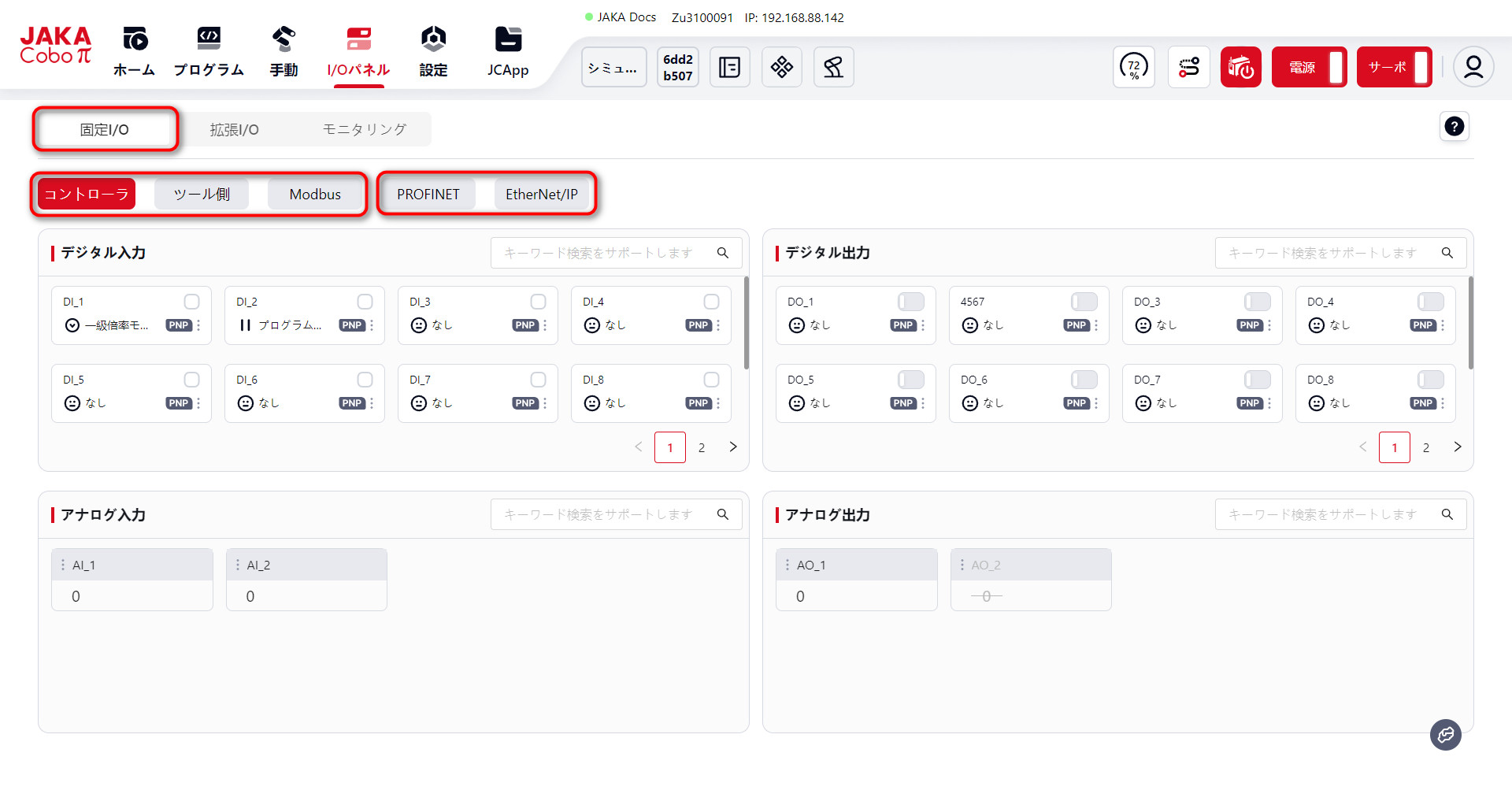
I/O パネルは、ロボット制御キャビネットの電気 I/O を表示および設定するために使用されます。
注意:
I/O の設定中は、ロボットが 無効 状態である必要があります。
固定 I/O
固定 I/O には 5 種類があります。制御キャビネット I/O、ツール端 I/O、および Modbus I/O はデフォルトの I/O タイプです。
PROFINET I/O および Ethernet I/O は、設定 で有効にした後にのみ表示されます。
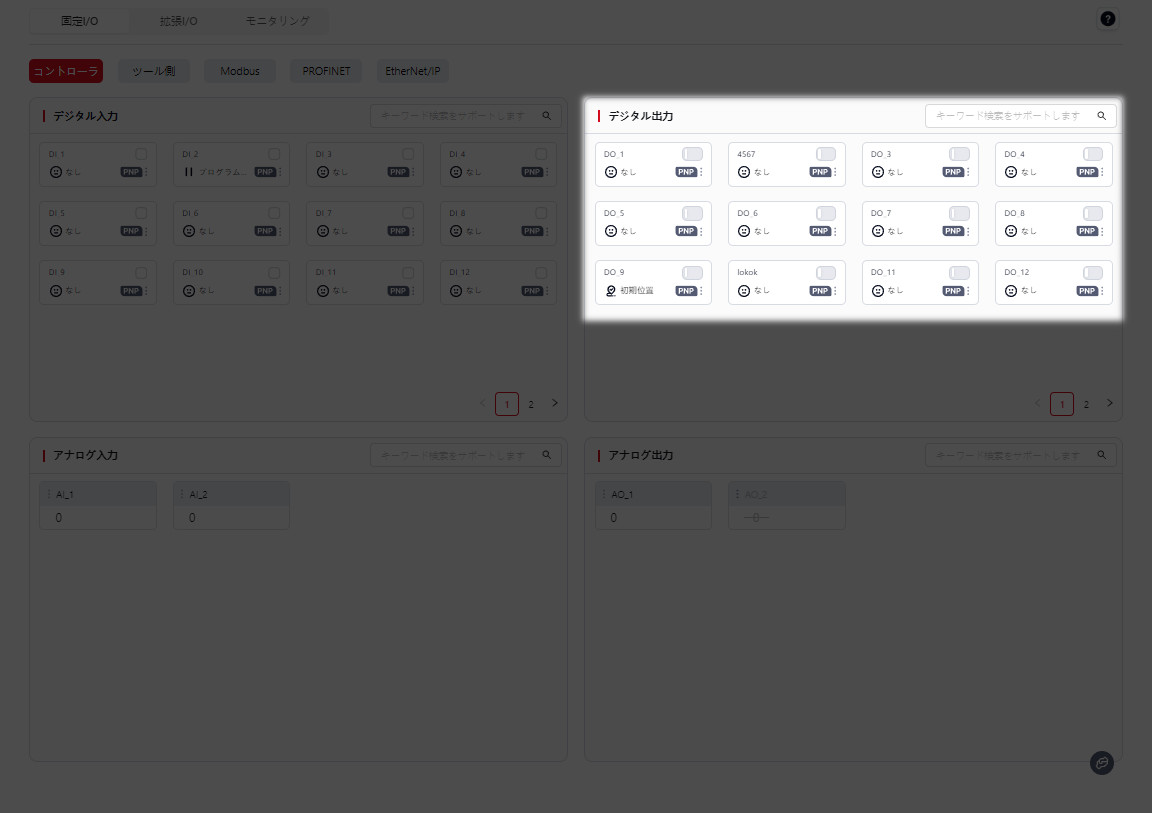
DI/DO 信号カードの説明:
I/O パネルでは、DI/DO 信号カードの形式は固定 I/O、動的 I/O、およびモニターボード全てで共通です。DI/DO 信号カードの構造についてはここで説明します。
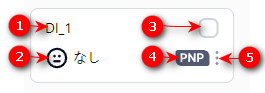
1 は、制御キャビネットのユーザー DI/DO タイプを示し、PNP 型と NPN 型が含まれます。現在、JAKA の標準キャビネットは PNP 型で、MiniCab キャビネットは NPN 型です。
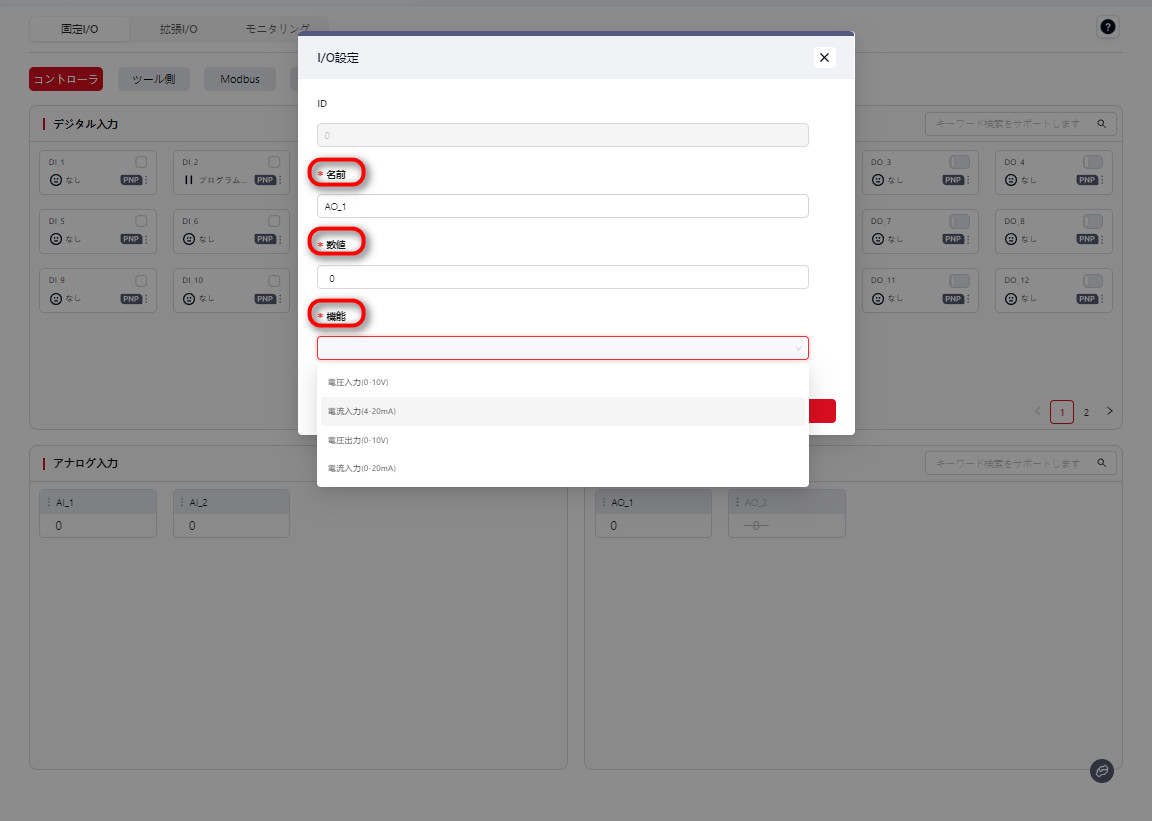
2 は、DI/DO 名を示し、ユーザーによって編集できます。
3 は、DI/DO 機能を示し、ユーザーが選択できます。
4 は、DI/DO 状態を示します。
5 この記号またはカードの空白エリアをクリックすると、設定 ページが開き、DI/DO の名前と機能を設定できます。
制御キャビネット
制御キャビネットは 2 種類に分かれています:標準キャビネット CAB 2.1 と MiniCab:
CAB 2.1: 16 の物理入力、16 の物理出力、および 2 のアナログ信号を備え、全て PNP 型で 24V 入力でトリガされます。CAB 2.1 を Coboπ に接続すると、I/O パネルには制御キャビネットの物理信号が表示され、右側のスクロールバーを使用して他の I/O 状態を見ることができます。
MiniCab: 7 の物理デジタル信号を備え、NPN 型で 0V 入力でトリガされます。MiniCab を Coboπ に接続すると、I/O パネルには制御キャビネットの物理信号が表示されます。一度に 1 つのインターフェースタイプのみを選択できます。たとえば、あるチャンネルが DI に設定されている場合、DO として同時に設定することはできません。
デジタル入力(DI)
警告:
この DI セクションは、標準キャビネットと MiniCab で同じです。
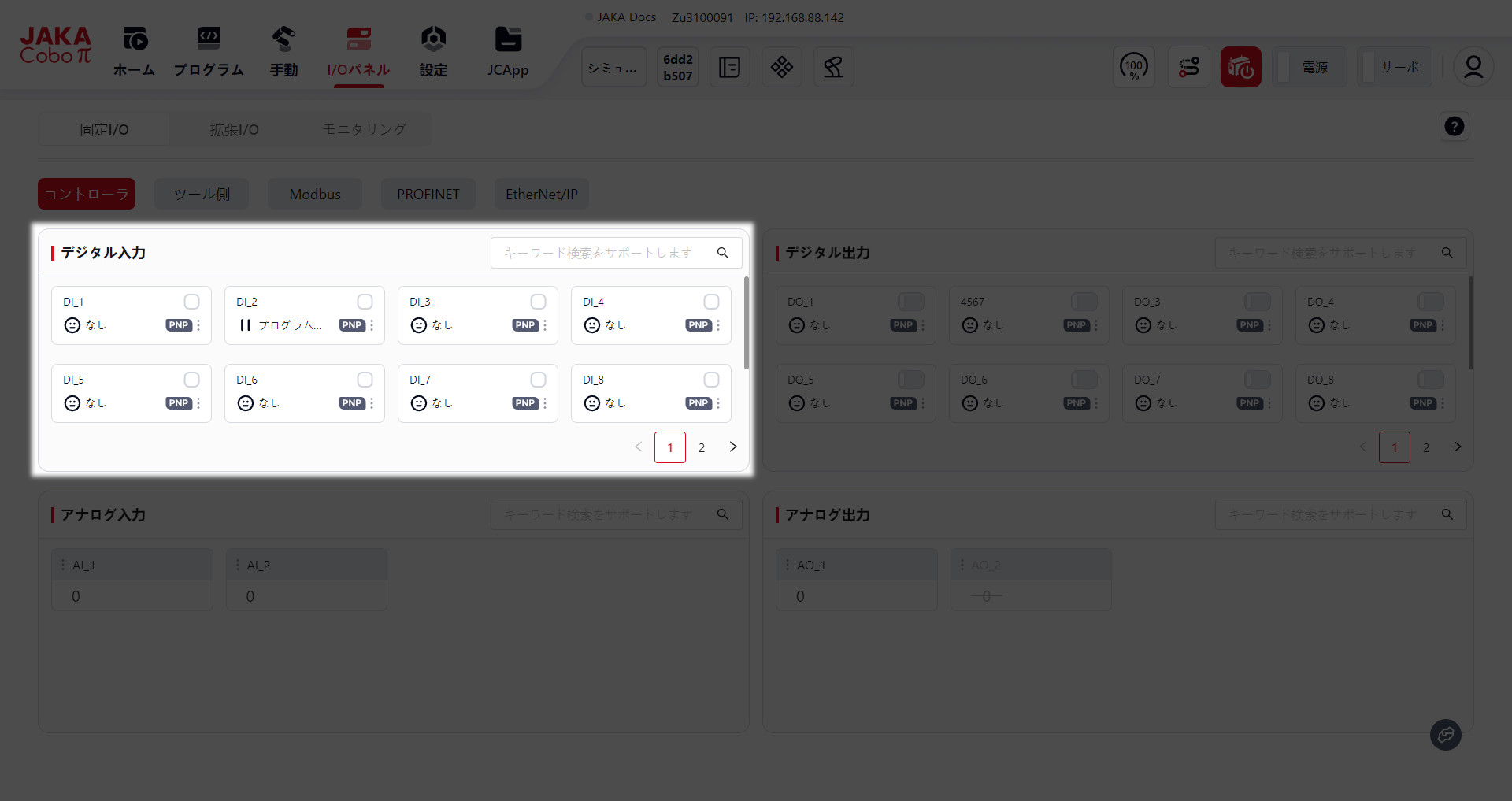
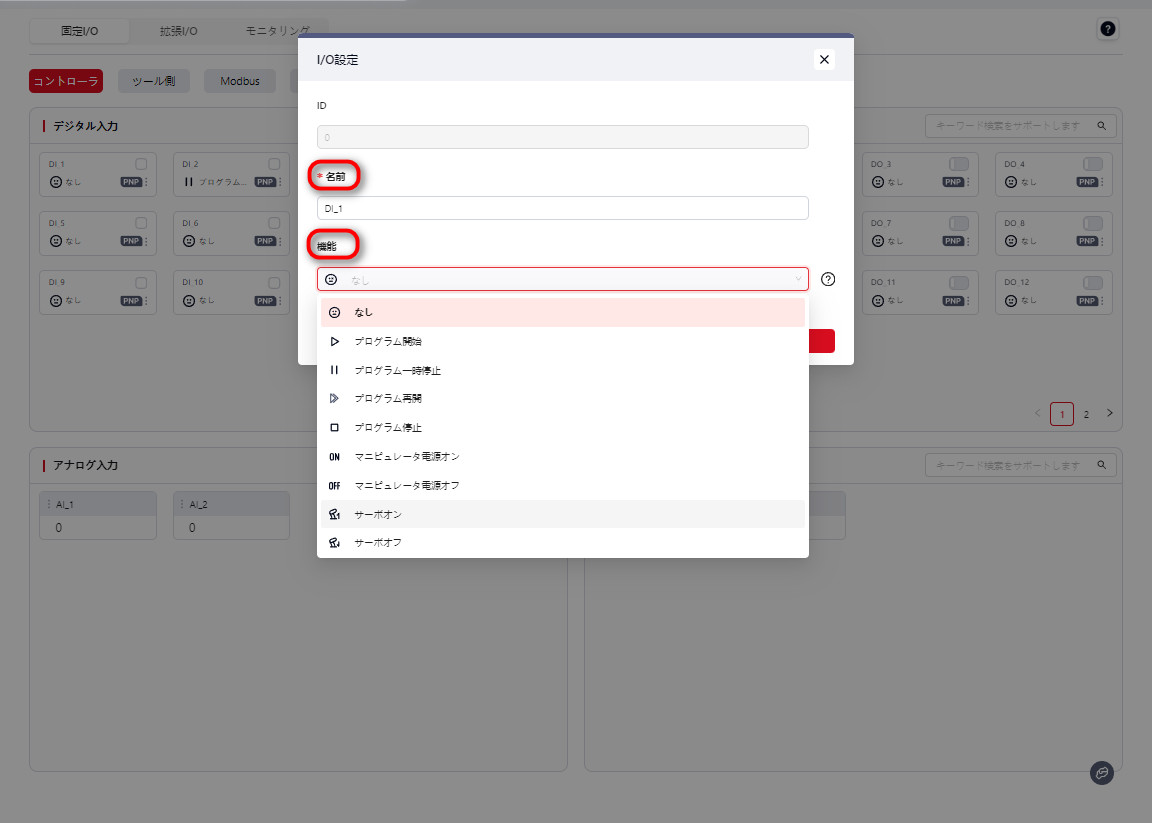
DI 設定を構成する手順は以下の通りです。DI 信号がトリガされると、対応する機能がアクティブになります。
DI 信号に対してサポートされている機能は以下の表に示されています:
| アイコン | 機能名 | 機能の説明 | トリガ方法 |
|---|---|---|---|
 | なし | なし | なし |
 | プログラム開始 | 開始プログラム DI がトリガされると、ロボットは現在開いているプログラムをプログラミング制御インターフェースで実行します。この DI は通常、停止したプログラムを再開するために使用されます。注意:プログラムインターフェースでプログラムを保存してから、この DI をトリガしてください。保存されていないプログラムがある場合、この DI がトリガされると、ロボットは最後に保存されたプログラムを実行します。 | 立ち上がり信号 |
 | プログラム一時停止 | 一時停止プログラム DI がトリガされると、ロボットは現在開いているプログラムをプログラミング制御インターフェースで一時停止します。プログラムは続行プログラム DI をトリガすることで再開できます。 | 立ち上がり信号 |
 | プログラム続行 | 続行プログラム DI がトリガされると、ロボットは現在開いているプログラムをプログラミング制御インターフェースで再開します。この DI は通常、一時停止したプログラムを再開するために使用されます。 | 立ち上がり信号 |
 | プログラム停止 | 停止プログラム DI がトリガされると、ロボットは現在開いているプログラムをプログラミング制御インターフェースで停止します。プログラムは開始プログラム DI をトリガすることで再開できます。 | 立ち上がり信号 |
 | 電源オン | 電源オン DI がトリガされると、ロボットの電源がオンになります。 | 立ち上がり信号 |
 | 電源オフ | 電源オフ DI がトリガされると、ロボットの電源がオフになります。 | 立ち上がり信号 |
 | ロボット有効化 | ロボット有効化 DI がトリガされると、ロボットが有効化されます。 | 立ち上がり信号 |
 | ロボット無効化 | ロボット無効化 DI がトリガされると、ロボットが無効化されます。 | 立ち上がり信号 |
 | 速度制限モード1 | 速度制限モード1 DI がトリガされると、ロボットは速度を遅くして、第一の速度制限モードに入ります。 | 低レベル信号 |
 | 保護停止 | 保護停止 DI がトリガされると、ロボットの動きが停止します。 | 低レベル信号 |
 | 初期位置に戻る | 初期位置に戻る DI がトリガされると、ロボットは 設定 - 安全設定 - ロボットの方向 インターフェースで設定された安全な姿勢位置に移動します。 | 立ち上がり信号 |
 | 速度制限モード2 | 速度制限モード2 DI がトリガされると、ロボットは速度を遅くして、第二の速度制限モードに入ります。 | 低レベル信号 |
 | 衝突クリア | 衝突クリア DI がトリガされると、ロボットの衝突警報が解除されます。 | 立ち上がり信号 |
 | ドラッグモード開始 | ドラッグモード開始 DI がトリガされると、ロボットはドラッグモードに入ります。 | 立ち上がり信号 |
 | ドラッグモード終了 | ドラッグモード終了 DI がトリガされると、ロボットはドラッグモードを終了します。 | 立ち上がり信号 |
注意:
- 第二の速度は第一の速度よりも低い必要があります。
- I/O 機能はエッジ信号(立ち上がりまたは立ち下がり)でトリガされます。ネットワーク通信の変動による遅延が I/O の機能トリガに影響を与えないように、信号レベルはエッジ信号前後で少なくとも 500ms 保持することをお勧めします。
デジタル出力(DO)
警告:
この DO セクションは、標準キャビネットと MiniCab で同じです。
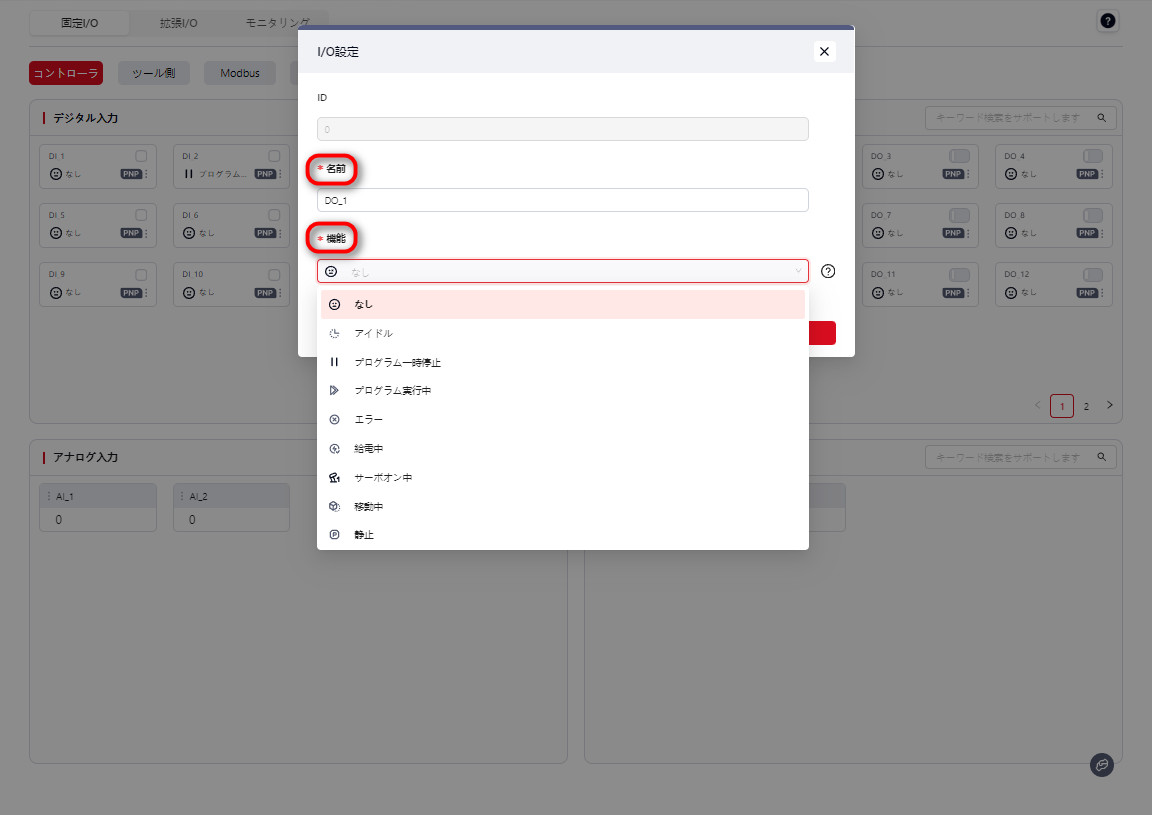
DO にバインドされる機能を設定する手順は以下の通りです。確認後、DO 信号はバインドされたシステム状態のリアルタイム状態を反映します。
バインドするためにサポートされているシステム状態は以下の表に示されています:
| アイコン | ロボットの状態 | 機能の説明 | 信号の状態 |
|---|---|---|---|
| なし | なし | なし |
 | 待機 | 待機状態は、ロボットがプログラムを実行していない状態です。 | 高レベル信号 |
| プログラム停止中 | プログラム停止中は、現在開いているプログラムが一時停止されている状態です。 | 高レベル信号 |
| プログラム実行中 | プログラム実行中は、ロボットがプログラミング制御インターフェースで現在開いているプログラムを実行している状態です。 | 高レベル信号 |
 | エラー | エラーは、ロボットが衝突警報をトリガした状態です。 | 高レベル信号 |
 | 電源オン | 電源オンは、ロボットが電源オンの状態にあることを示します。 | 高レベル信号 |
| 有効化 | 有効化は、ロボットが有効な状態にあることを示します。 | 高レベル信号 |
 | 移動中 | 移動中は、ロボットが移動している(プログラム実行中、手動操作中、二次開発コントロール中など)状態を示します。 | 高レベル信号 |
 | 停止中 | 停止中は、ロボットが停止している(プログラムが一時停止、プログラム未実行、プログラム終了、信号待機など)状態を示します。 | 高レベル信号 |
| 電源オン | 電源オンは、制御キャビネットが電源オンの状態にあることを示します。 | 高レベル信号 |
 | 緊急停止 | 緊急停止は、ロボットの動きが停止し、電源がオフで無効化されている状態を示します。 | 高レベル信号 |
| 速度制限モード1 | 速度制限モード1は、ロボットが第一の速度制限モードに入っている状態を示します。 | 高レベル信号 |
| 速度制限モード2 | 速度制限モード2は、ロボットが第二の速度制限モードに入っている状態を示します。 | 高レベル信号 |
| 保護停止 | 保護停止は、ロボットの動きが停止したことを示します。 | 高レベル信号 |
 | 初期位置 | 初期位置は、設定 - 安全設定 - ロボットの方向 インターフェースでユーザーが定義した安全な姿勢位置を示します。ロボットがこの位置にあるときに、この信号がトリガされます。 | 高レベル信号 |
| ドラッグモード | ドラッグモードは、ロボットがドラッグモードにある状態を示します。 | 高レベル信号 |
 | 衝突 | 衝突は、ロボットが衝突したことを示します。 | 高レベル信号 |
アナログ入力(AI)
警告:
この機能は標準キャビネットでのみサポートされています。
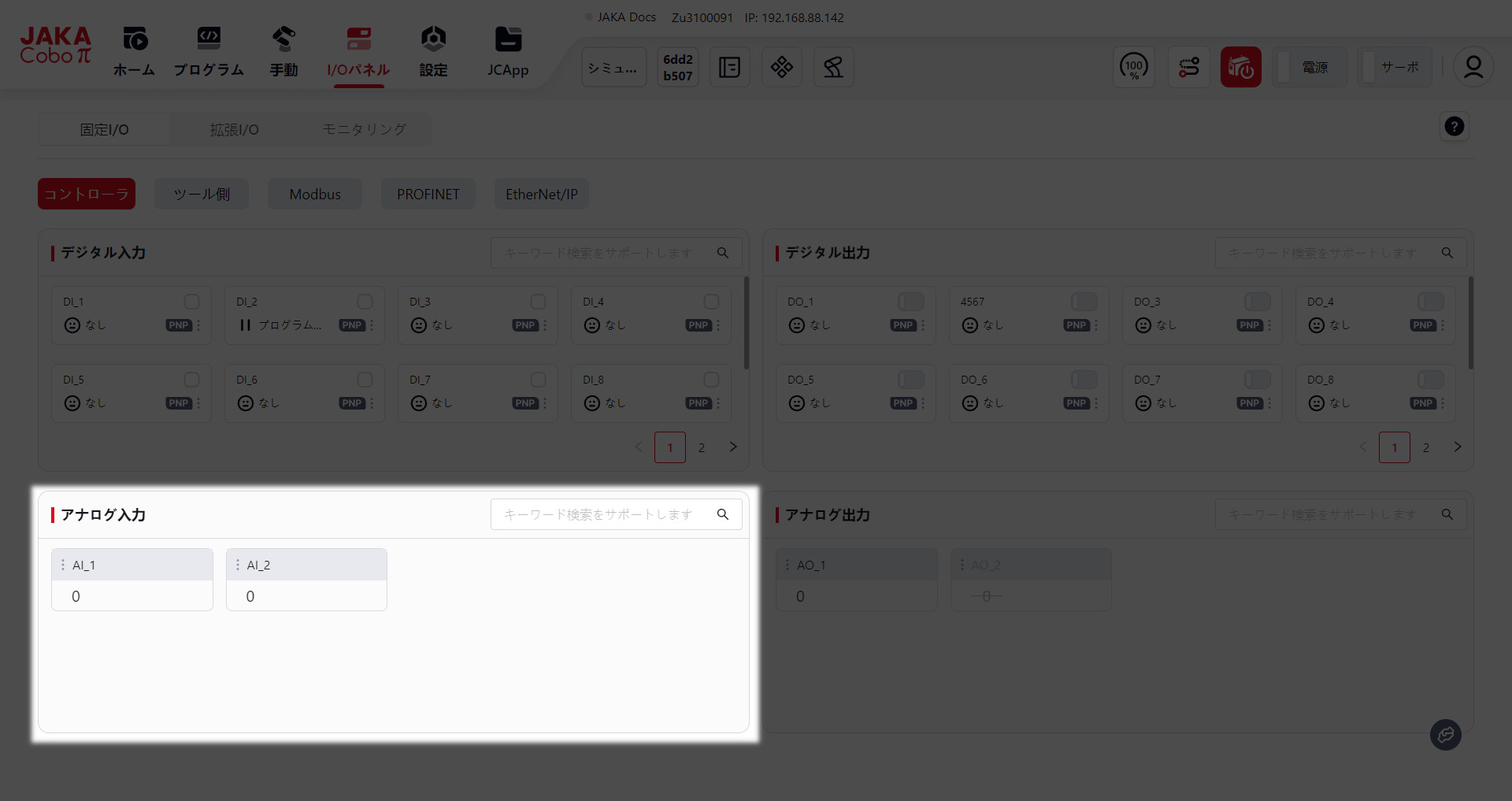
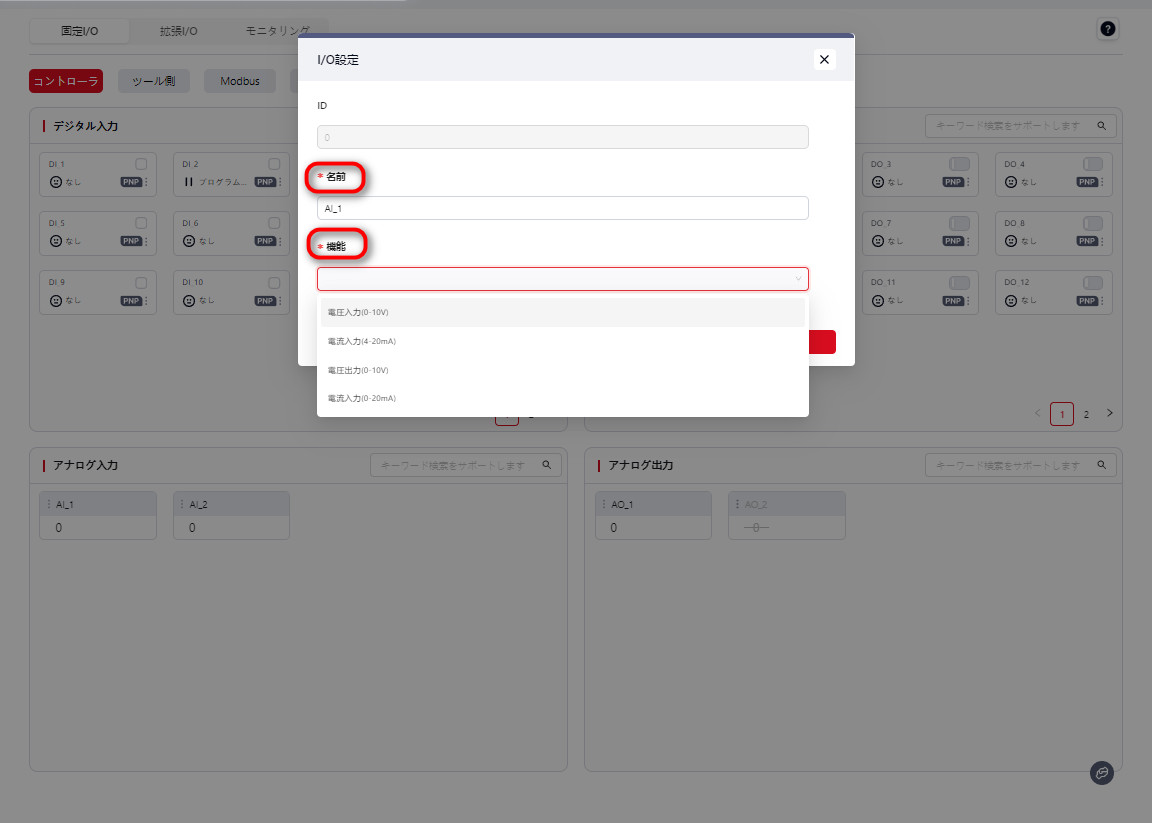
アナログ入力インターフェースは、アナログ信号の監視を可能にします。操作方法は、DI/DO と同様です。
アナログ出力(AO)
警告:
この機能は標準キャビネットでのみサポートされています。
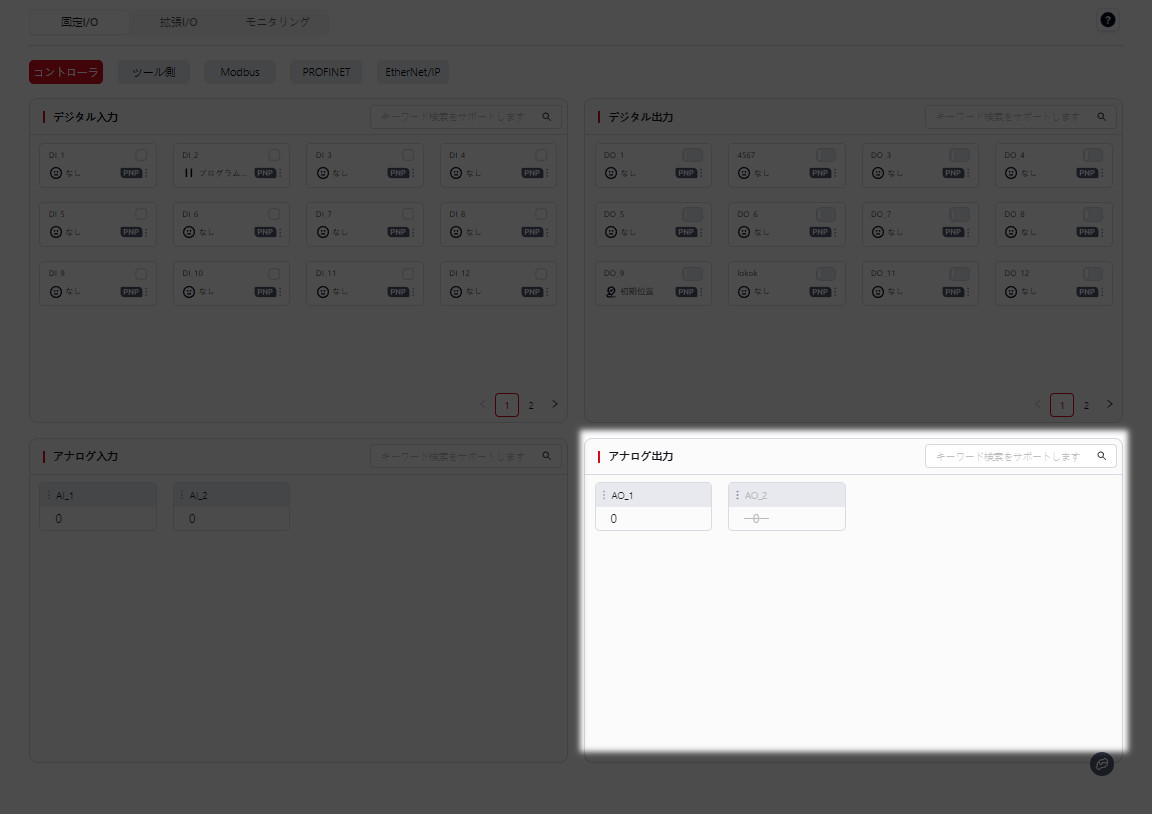
アナログ出力インターフェースは、アナログ信号の監視を可能にします。操作方法は、DI/DO と同様です。
TIO
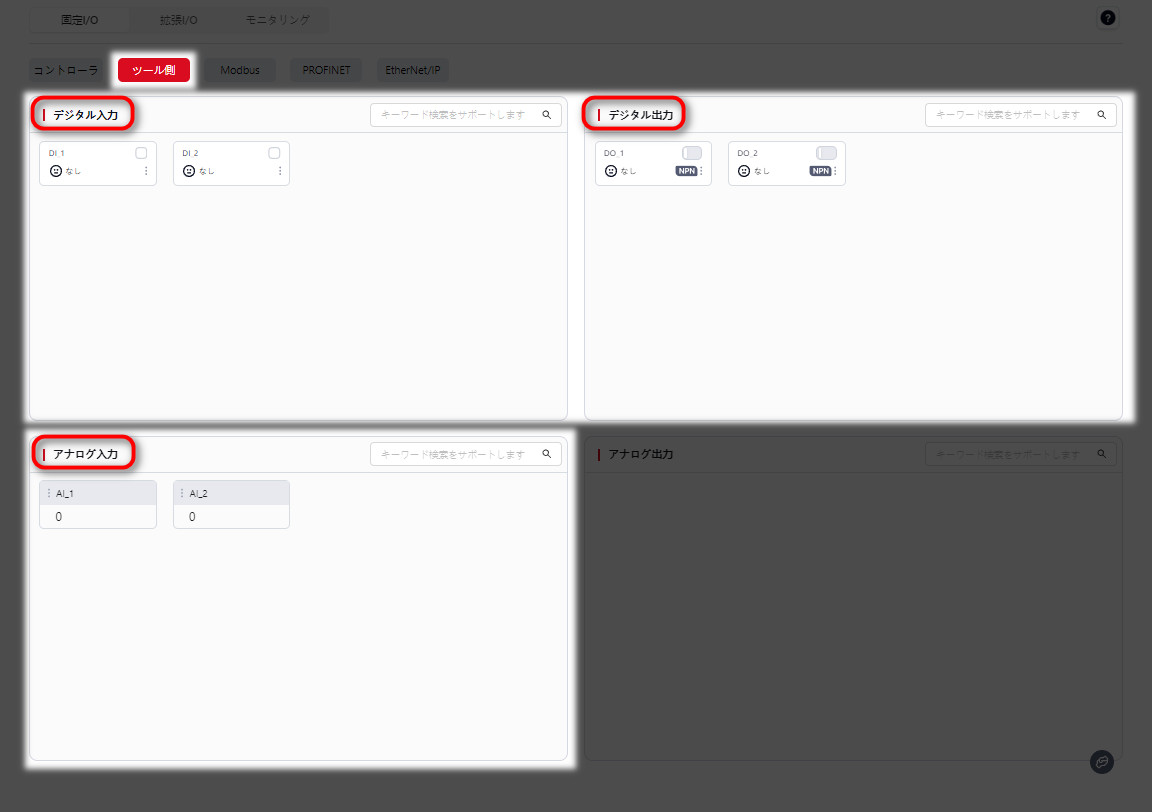
ロボットのエンドエフェクター TIO(ツール I/O)には、V2 と V3 の 2 バージョンがあります。このセクションでは V3 を説明します。他のバージョンについては、JAKA 技術サポートにお問い合わせください。
エンドエフェクター TIO を使用する際、設定は 設定 - ハードウェアおよび通信 - ツール I/O から行うか、直接このインターフェースから設定できます。
V3 バージョンのツールインターフェースは、ロボット本体に 2 チャンネルのデジタル入力、2 チャンネルのデジタル出力、2 チャンネルのアナログ入力をサポートします。2 チャンネルのデジタル出力は、高速 RS485 チャンネルとして再利用でき、2 チャンネルのアナログ入力は、低速 RS485 チャンネルとして再利用できます。
デジタル入力
TIO 機能は、2 チャンネルの DI をサポートしており、それぞれ NPN 型入力または PNP 型入力に設定できます。TIO の電源を入れると、両方の DI チャンネルはデフォルトで NPN 入力に設定されます。
設定方法は制御キャビネットと同じです。
デジタル出力
TIO 機能では、2 チャンネルの DO を RS485 チャンネルピンとして再利用できます。DO として使用する場合、それぞれ異なる出力モード(NPN 出力、PNP 出力、またはプッシュプル出力)に設定できます。TIO の電源を入れると、両方の DO チャンネルはデフォルトで NPN 出力に設定されます。
設定方法は制御キャビネットと同じです。
警告:
2 チャンネルの DO を RS485 チャンネルとして使用する場合、両方のチャンネルは RS485 チャンネル 1 モードに設定する必要があります。
1 つの DO が RS485 チャンネル 1 モードに切り替わると、他の DO も自動的に RS485 チャンネル 1 に設定されます。もし 1 つの DO が RS485 チャンネル 1 モードから他のモードに切り替わると、他の DO は自動的に NPN 出力モードに設定されます。
アナログ入力
TIO 機能は、RS485 チャンネル 2 として再利用できる 2 チャンネルのアナログ入力を提供します。
設定方法は制御キャビネットと同じです。
TIO の電源を入れると、アナログ入力はデフォルトで使用されます。
アナログ信号の電圧範囲は 0-10V で、ディスプレイ範囲は 0-4096 に対応します。0V は 0、10V は 4096 に対応し、精度は 0.1V です。
注意:
外部機器が TIO に接続されていない場合でも、AI 表示値は 0 にはなりません。外部機器が接続されていない場合、表示される値は TIO ボードモデルによって異なり、通常は 400-500 または 700-800 程度です。
Modbus
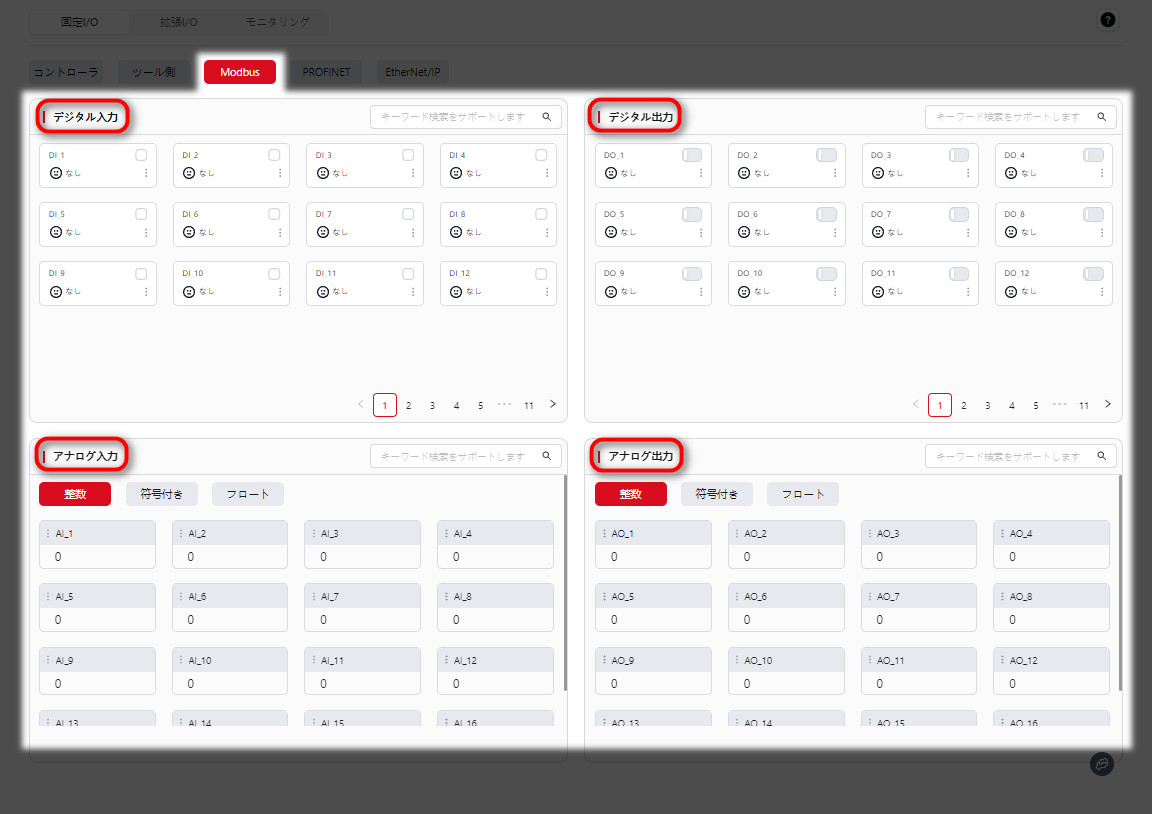
JAKA のロボット制御キャビネットは Modbus 通信プロトコルをサポートし、Modbus スレーブとして外部機器と通信できます。
Modbus ウィンドウの I/O 信号は、ロボットと外部機器との間で Modbus 通信を通じてアクセスできる I/O データを表します。制御機器は Modbus デバイスとして、128 のデジタル入力、128 のデジタル出力、16 の整数アナログ入力、16 の整数アナログ出力、16 の符号付きアナログ入力、16 の符号付きアナログ出力、32 の浮動小数点アナログ入力、32 の浮動小数点アナログ出力をサポートします。
Modbus レジスタアドレスの詳細な定義については、Modbus I/O アドレス表 を参照してください。PLC 通信設定については、JAKA 通信ユーザーマニュアル を参照してください。
デジタル入力(DI)/ 出力(DO)
デジタル入力/出力インターフェースは、Modbus でデジタル入力状態を監視できます。
DI:DI 信号がトリガされると、選択された機能がアクティブになります。
DO:DO インターフェースは、選択された機能のリアルタイム状態を表示します。
サポートされている機能と詳細な説明、および設定方法は、制御キャビネット と同様です。
アナログ入力(AI)/ 出力(AO)
アナログ入力/出力インターフェースは、Modbus のアナログ信号を監視できます。
Modbus の値は単精度浮動小数点数で、7 桁の有効数字に丸められます。有効数字を超える値は丸められます。
設定方法は上記と同様です。
PROFINET
注意:
PROFINET と EtherNet/IP は、設定 - ハードウェアおよび通信 - PROFINET 設定 と EtherNet/IP 設定 で有効にする必要があります。その後、I/O パネル に表示されます。
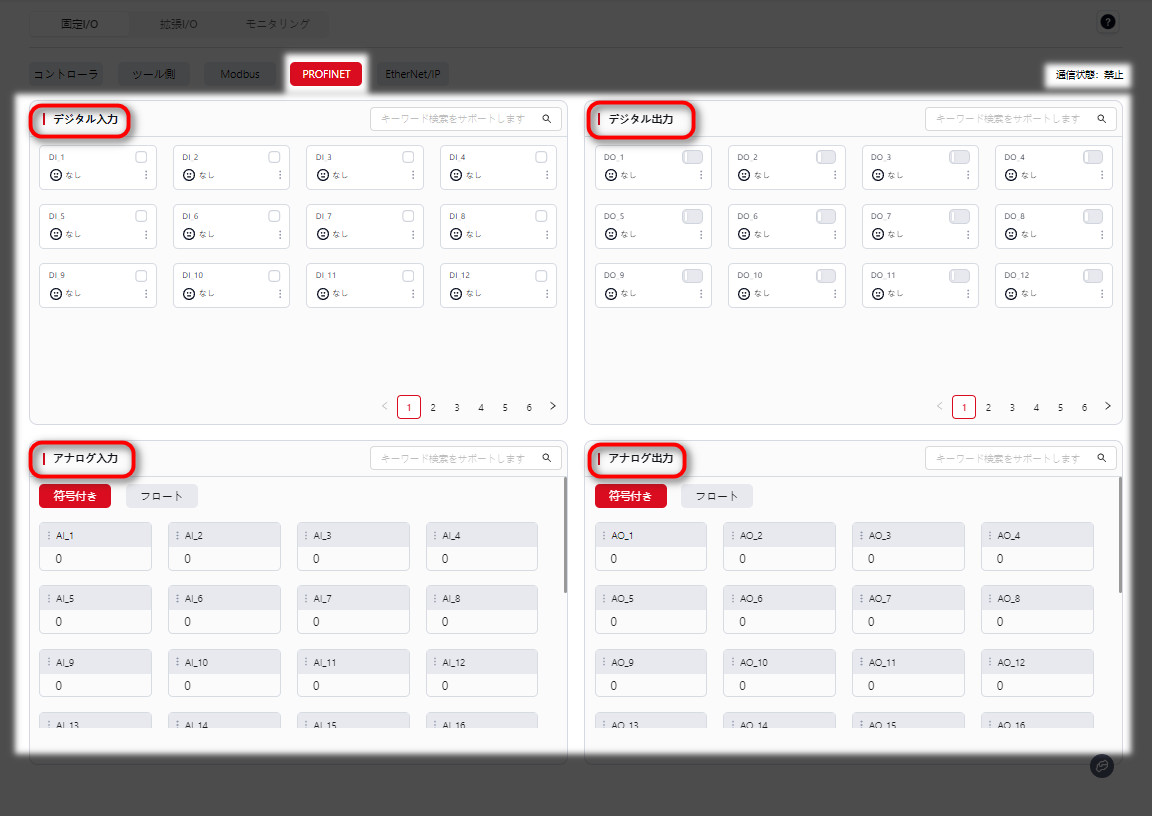
制御キャビネットは PROFINET 通信プロトコルをサポートしており、PROFINET I/O スレーブとして外部機器と通信できます。
PROFINET ウィンドウの I/O 信号は、ロボットと外部機器との間で PROFINET 通信を通じてアクセスできる I/O データを表します。PROFINET デバイスとして、制御機器は 64 のデジタル入力、64 のデジタル出力、32 の符号付きアナログ入力、32 の符号付きアナログ出力、32 の浮動小数点アナログ入力、32 の浮動小数点アナログ出力をサポートします。
PROFINET のレジスタアドレス定義については、PROFINET I/O アドレス表 を参照してください。
GSDML–XML デバイス記述ファイルを取得するには、JAKA に技術サポートを依頼してください。
PLC 通信設定については、JAKA 通信ユーザーマニュアル を参照してください。
PROFINET のデジタル入力、デジタル出力、アナログ入力、およびアナログ出力の設定方法は、Modbus と同じです。
EtherNet/IP
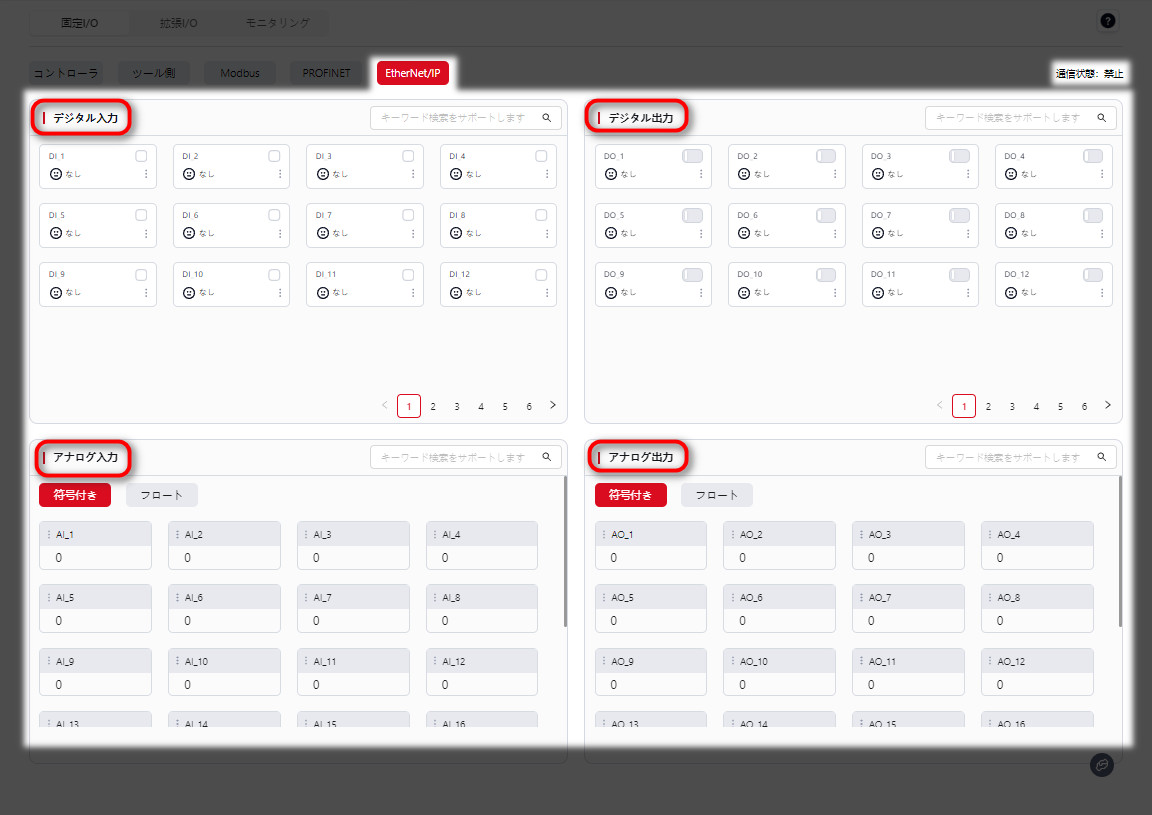
制御キャビネットは EtherNet/IP 通信プロトコルをサポートしており、EtherNet/IP「アダプタ」として外部機器と通信できます。
EtherNet/IP ウィンドウの I/O 信号は、ロボットと外部機器との間で EtherNet/IP 通信を通じてアクセスできる I/O データを表します。EtherNet/IP デバイスとして、制御機器は 64 のデジタル入力、64 のデジタル出力、24 の符号付きアナログ入力、24 の符号付きアナログ出力、24 の浮動小数点アナログ入力、24 の浮動小数点アナログ出力をサポートします。
EtherNet/IP のレジスタアドレス定義については、付録 6: EtherNet/IP I/O アドレス表を参照してください。
EDS デバイス記述ファイルを取得するには、JAKA に技術サポートを依頼してください。
EtherNet/IP のデジタル入力、デジタル出力、アナログ入力、およびアナログ出力の設定方法は、Modbus と同じです。
拡張 I/O
拡張 I/O は Modbus TCP/IP および Modbus RTU 通信プロトコルをサポートしており、ロボットは マスター として機能します。
拡張 I/O を設定する前に、配線を完了する必要があります:
- Modbus TCP/IP の場合、標準キャビネットを制御キャビネットの下部ネットワークポートに接続するか、MiniCab を LAN2 ポートに接続します。
- Modbus RTU の場合、標準キャビネットを前面パネルの RS485 インターフェースに接続するか、MiniCab を前面パネルの PIN17 と PIN18 I/O インターフェースに接続します。
インターフェースの場所と配線方法については、ハードウェアユーザーマニュアルを参照してください。
注意:
拡張 I/O のデジタル入力、デジタル出力、アナログ入力、およびアナログ出力の設定方法は、Modbus と同じです。
拡張 I/O モジュールの最大制限は次の通りです:
- 8 拡張 I/O モジュール
- 32 AI/AO チャンネル
- 64 DI/DO チャンネル :::
警告:
拡張 I/O を設定する際は、ロボットの電源を オフ にしてください。
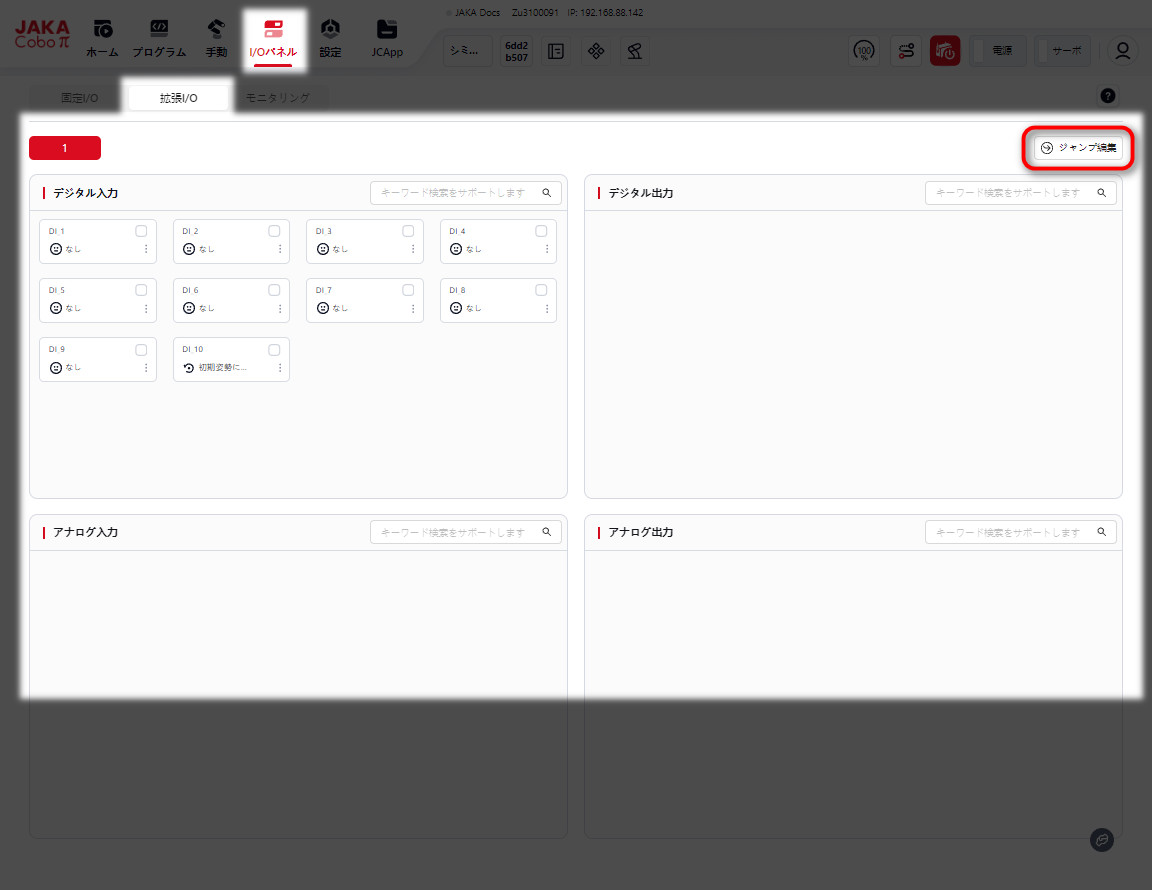
拡張 I/O の初期状態では、設定されていない場合、拡張 I/O ページを開くと、上記のページと同じインターフェースが表示されます。この時、ユーザーはページ右上の 編集にジャンプ ボタンをクリックする必要があり、これにより自動的に 設定 - Modbus 設定 - スレーブステーション管理 にリダイレクトされます。
次に 追加 をクリックして設定インターフェースに入ります:
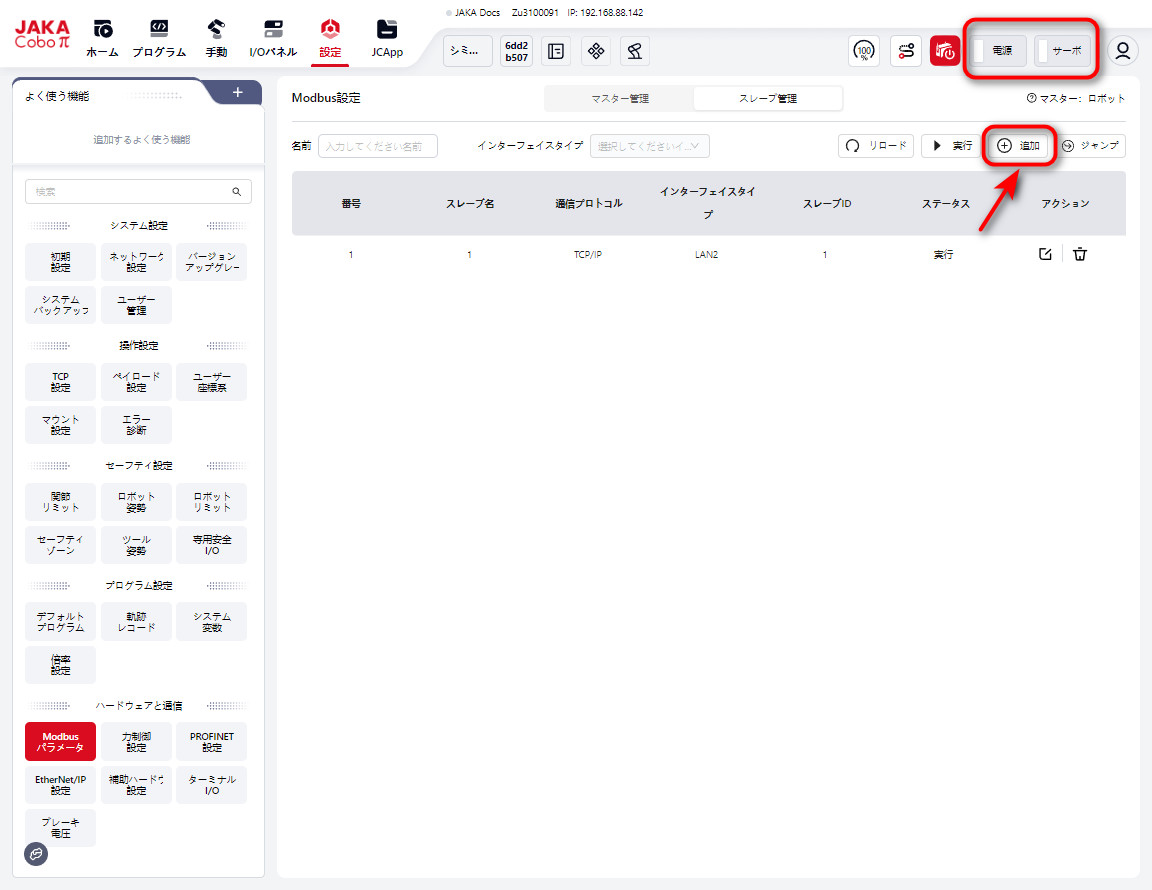
注意:
設定インターフェースに 追加 ボタンが表示されない場合は、まず 停止 をクリックしてください:
Modbus TCP/IP
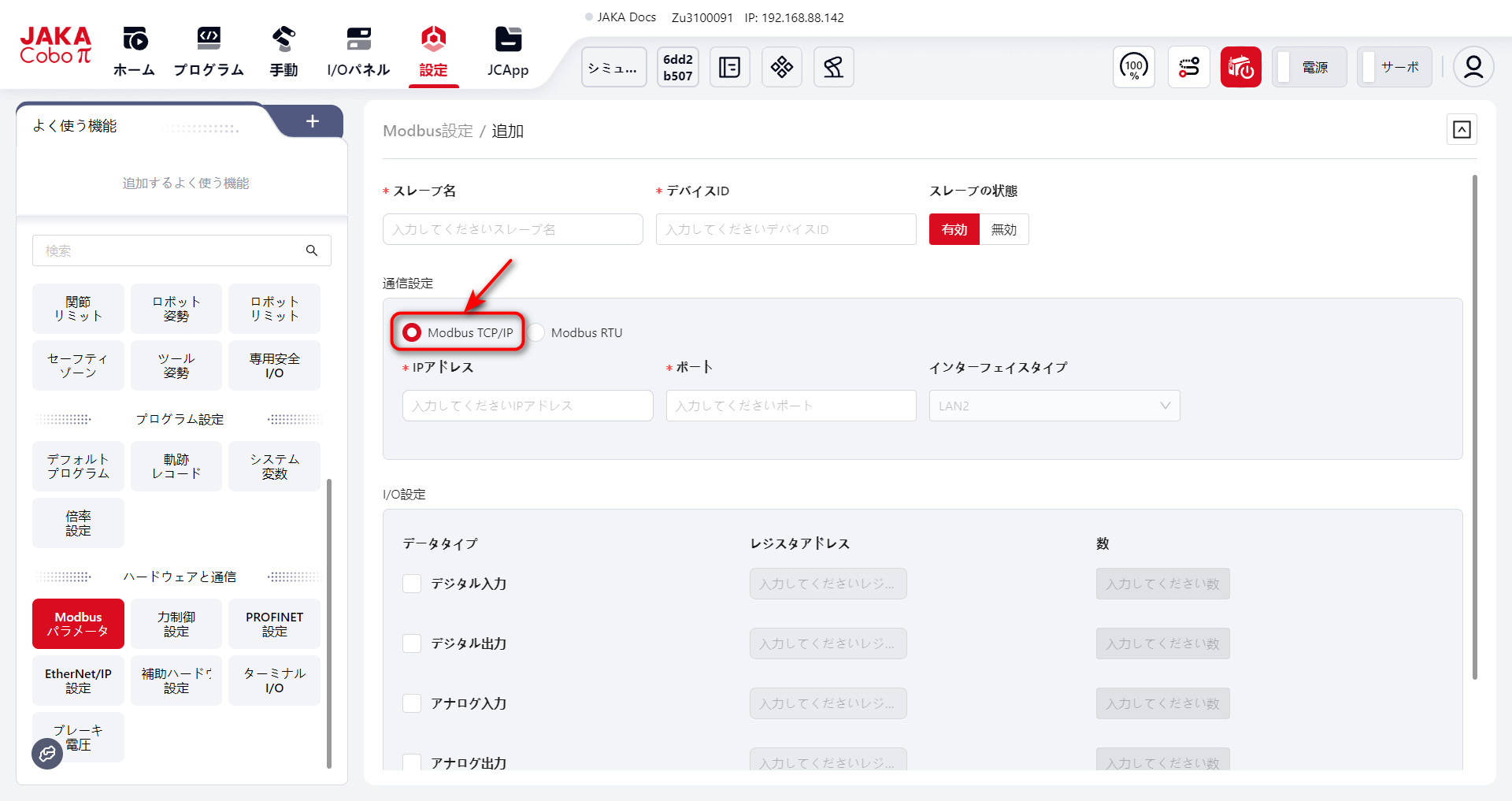
スレーブ名:ユーザー定義;他のモジュール名と重複しないようにしてください。デバイスID:スレーブのデバイス番号。IPアドレス:Modbus TCP/IP スレーブの IP アドレス。ポート:スレーブのポート番号。I/O 設定: Modbus TCP/IP の DI、DO、AI、AO のレジスタアドレスおよび数量を設定します。
設定後、OK をクリックすると、新しく設定した Modbus モジュールが拡張 I/O ページに表示されます。
Modbus RTU
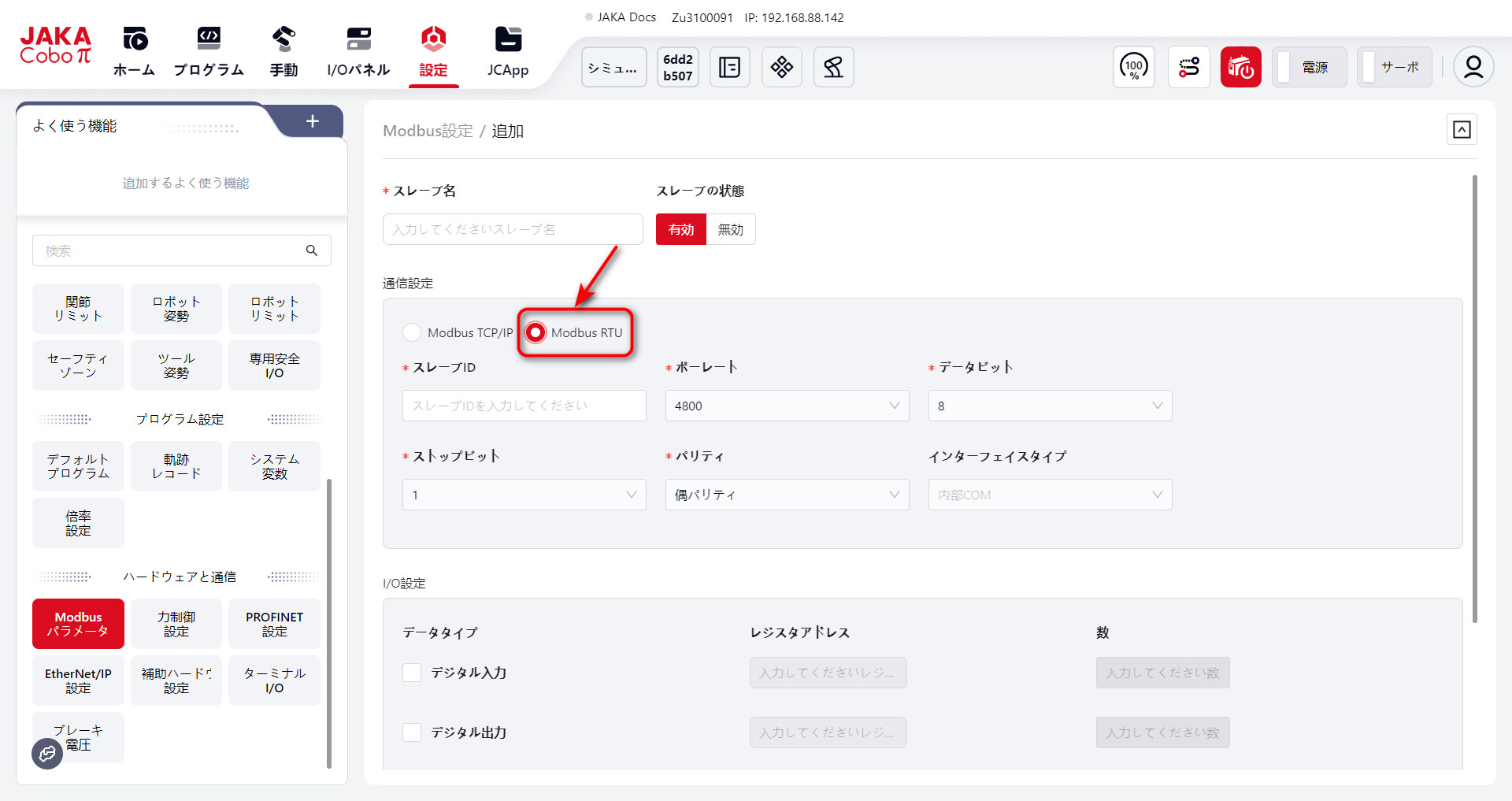
スレーブ名:ユーザー定義;他のモジュール名と重複しないようにしてください。スレーブノード番号:設定された Modbus RTU のステーション番号。ボーレート:設定された Modbus RTU のボーレートを選択します。データビット:設定された Modbus RTU のデータビット長を選択します。ストップビット:設定された Modbus RTU のストップビット長を選択します。パリティ:設定された Modbus RTU のパリティ方式を選択します。I/O 設定: Modbus RTU の DI、DO、AI、AO に対応するレジスタアドレスと数量を入力します。
設定後、OK をクリックすると、新しく設定した Modbus モジュールが拡張 I/O ページに表示されます。
注意:
複数の Modbus RTU 拡張モジュールを設定する場合、ボーレート、ストップビット長、データビット長、パリティ方式などのバスパラメータが一致していることを確認してください。
監視ボード
ユーザーは既存の固定 I/O と拡張 I/O を 監視ボード ページに追加して、プログラム実行中に集中して表示できます。
具体的な手順は以下の通りです:
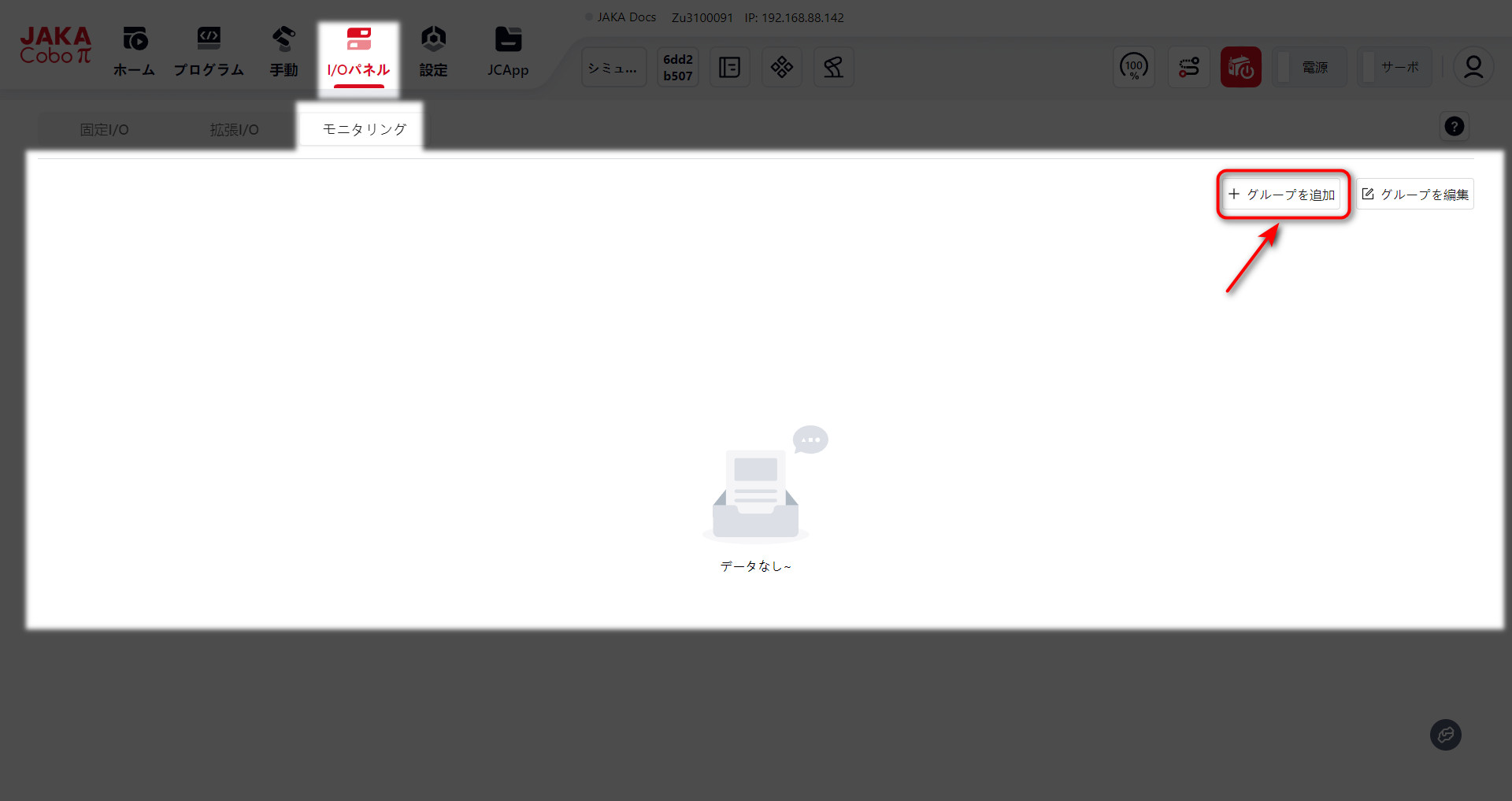
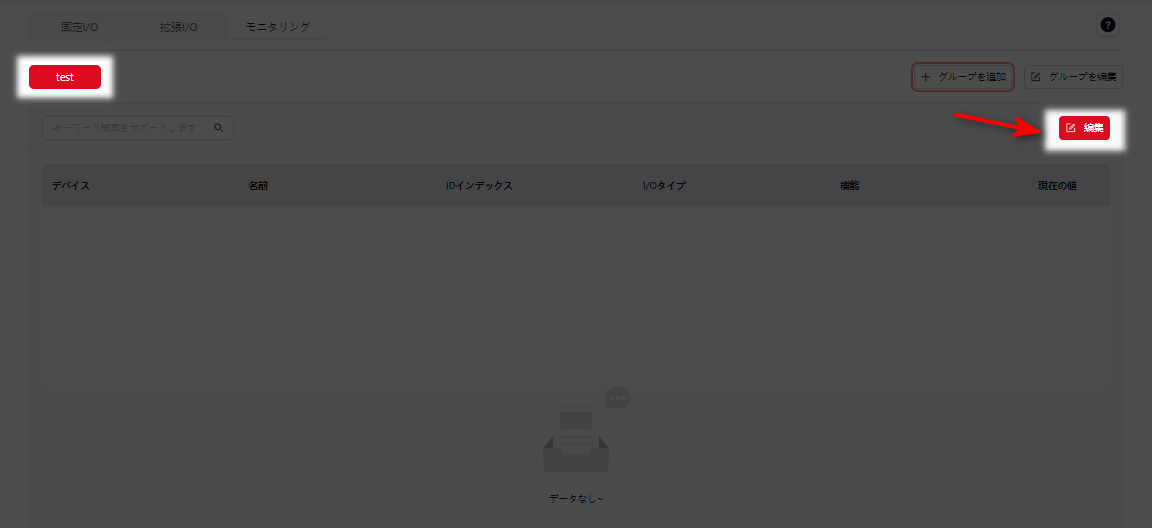
- 初期状態で I/O が追加されていない場合、
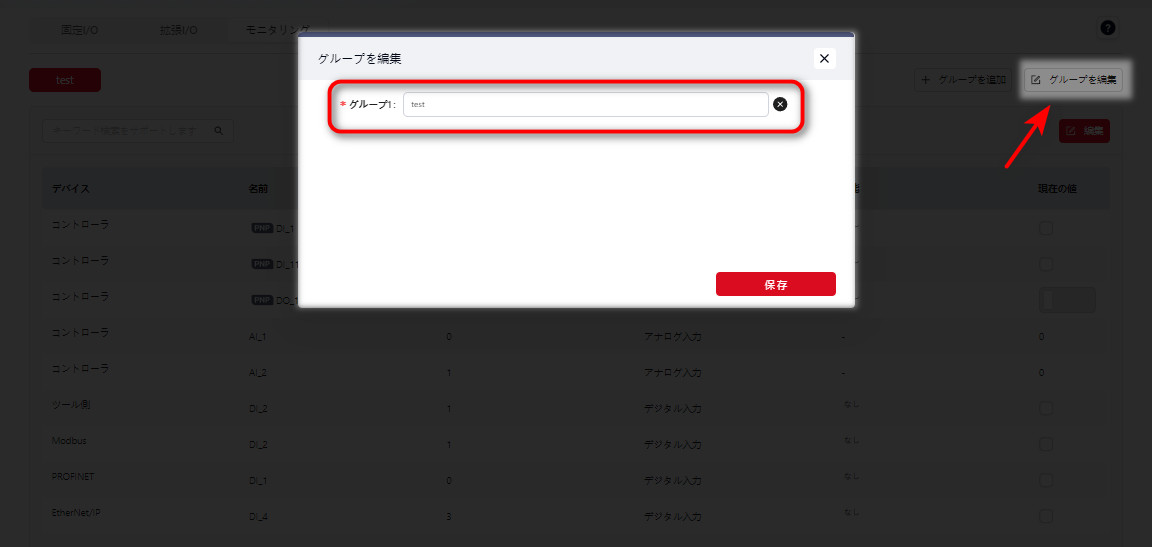
監視ボードページは下記のように表示されます。この時、ユーザーはページ右上のグループを追加をクリックする必要があります。
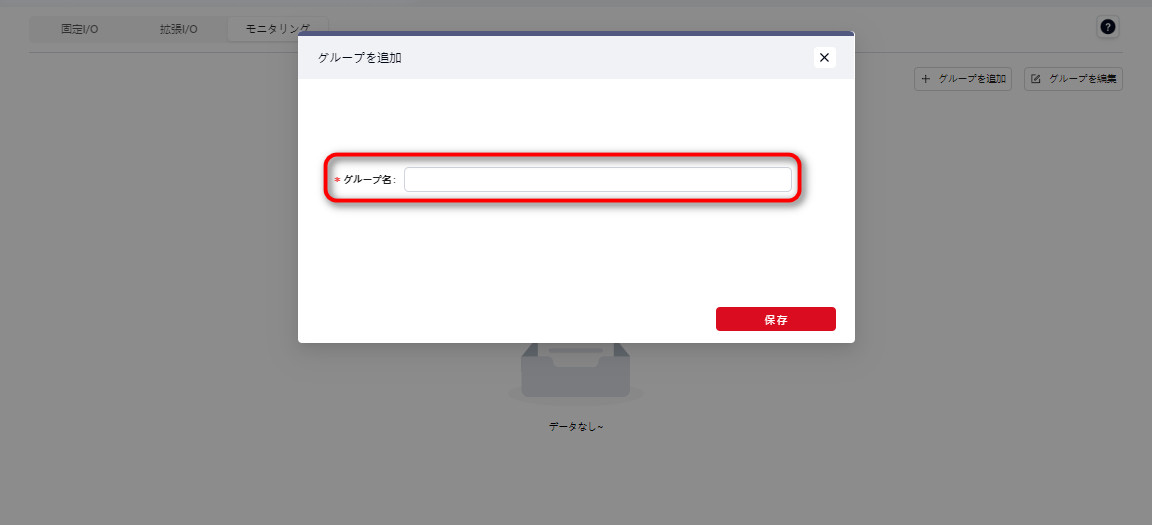
グループ名フィールドにカスタム名を入力して、保存をクリックします。
- 保存されたグループはページの左上に表示されます。その後、右側の
編集をクリックします。
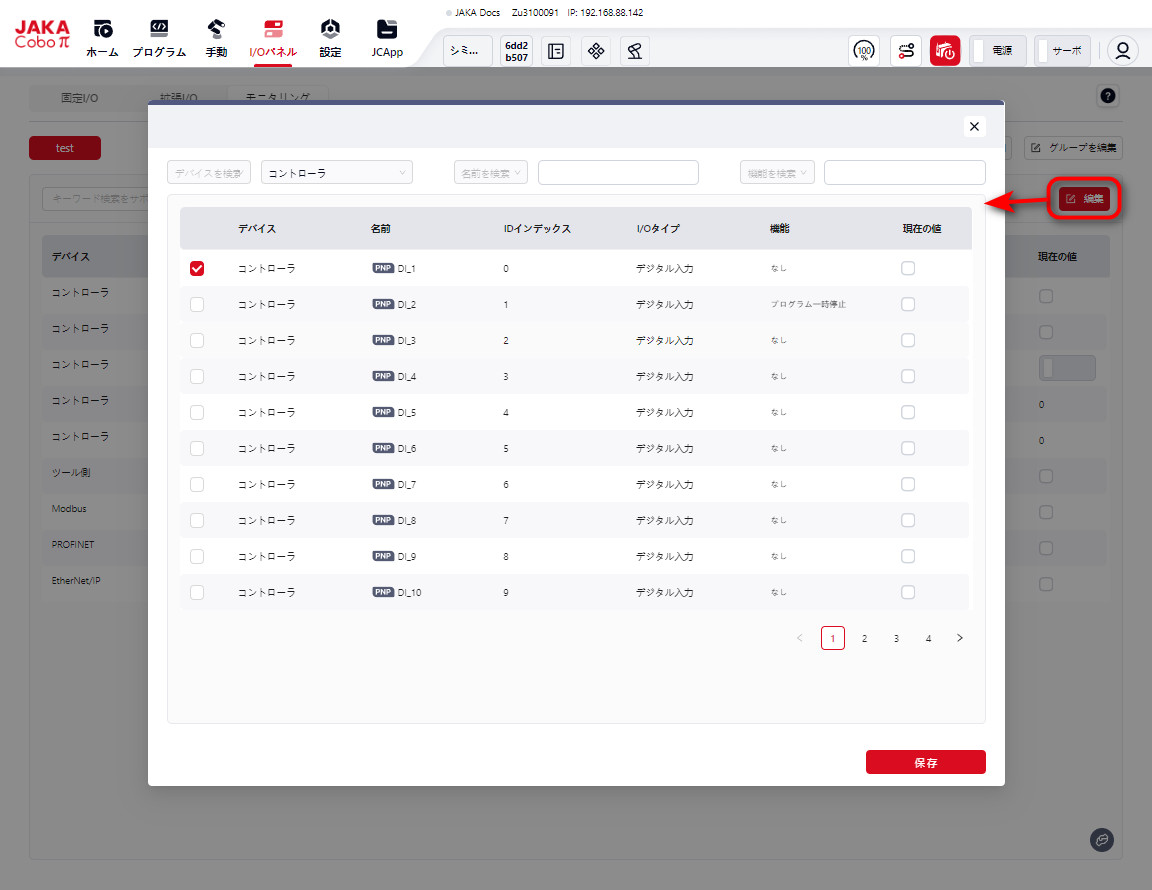
- ポップアップボックスで、実際のニーズに応じて必要な I/O を選択します:
検索デバイス のドロップダウンメニューから I/O のカテゴリを選択できます。
または、検索名 および 検索機能 でキーワードを使用して必要な I/O を直接検索できます。
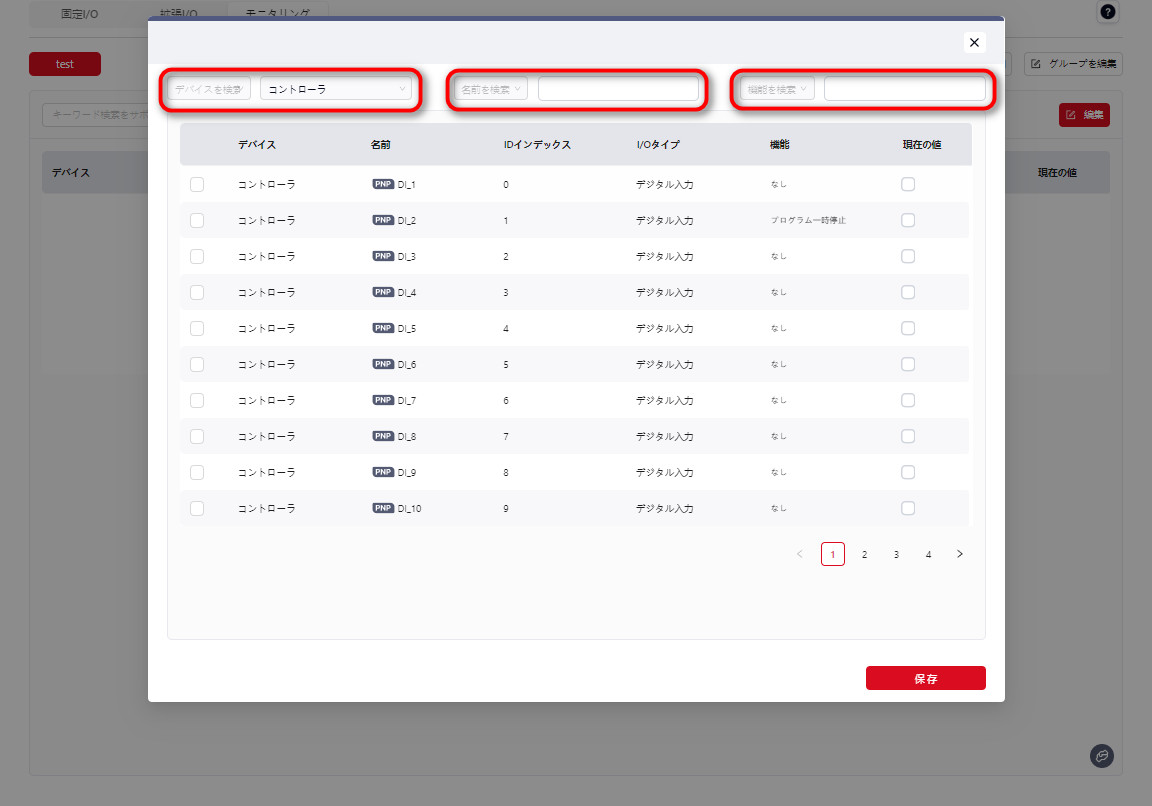
- 必要な I/O を選択し、
保存をクリックします。
注意:
異なるデバイスから異なる I/O を同時に選択できます。 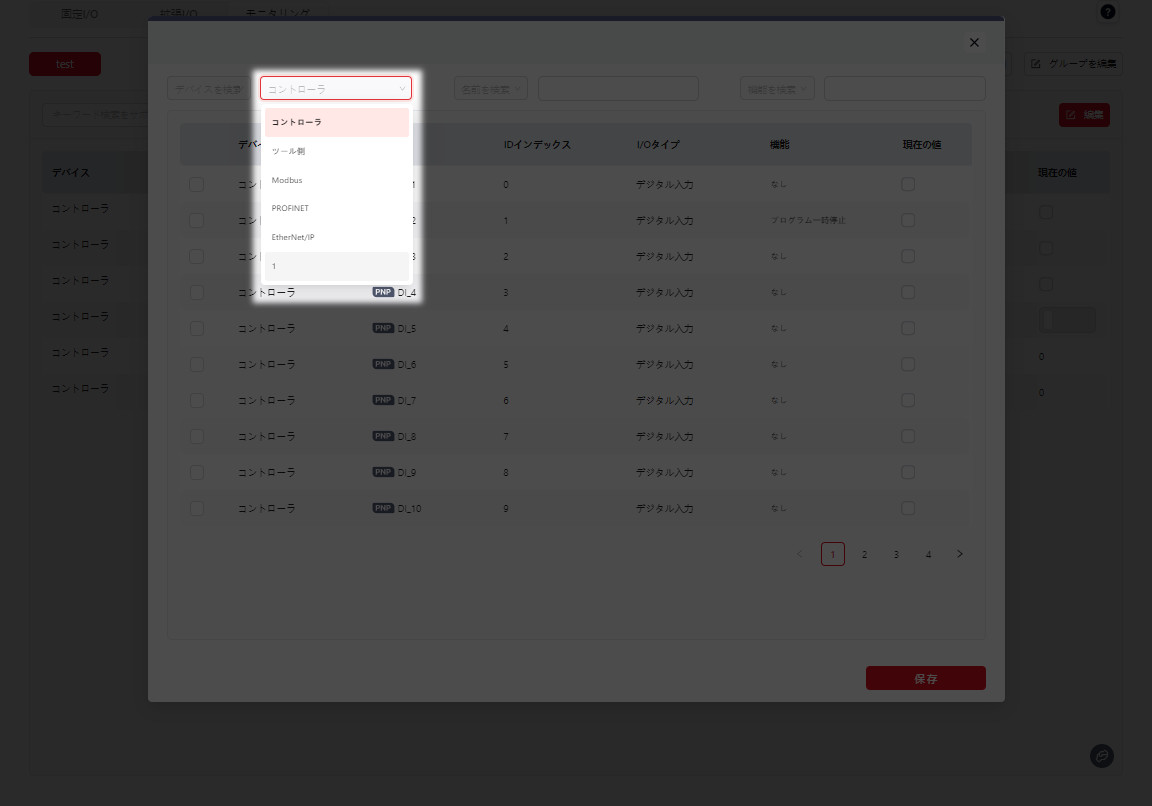
- 保存後、選択した I/O は同じグループに属し、同じインターフェースに表示されます。
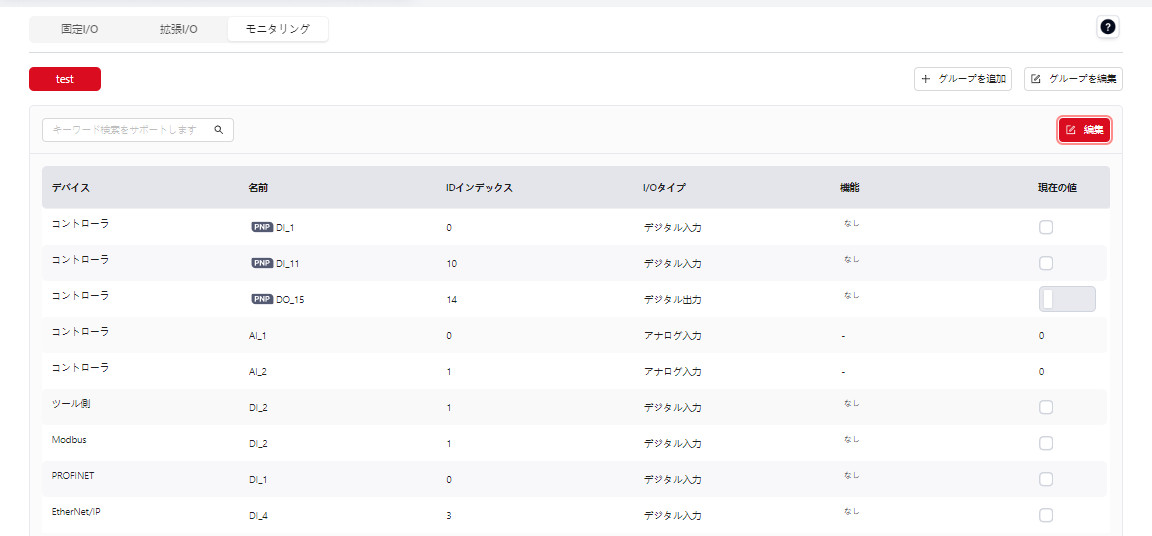
編集をクリックすると、選択ボックスが表示され、ユーザーは以前に選択した I/O アイテムを選択解除できます。
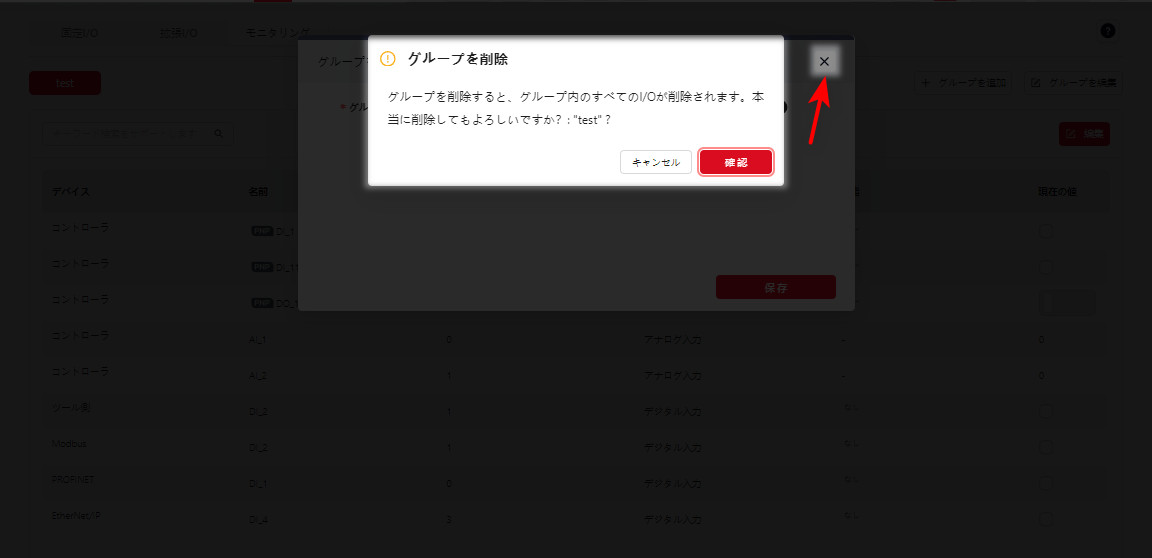
グループ編集をクリックすると、編集ボックスが表示され、ユーザーはグループ名を変更したり、×をクリックして現在のグループを削除したりできます。
- 他の I/O と同様に、設定された監視ボードの内容は
プログラムページでも表示できます。