JAKA Dashboard テンプレートを使用する
JAKA Dashboard テンプレートを使用する
このページには、JAKA Dashboard テンプレートのプレビューに関する詳細な使用ガイドが含まれています。
使いやすくするために、JAKA Node-RED のサンプルライブラリには、ロボット操作に関連するいくつかのテンプレートがあらかじめ用意されています。ユーザーはこれらのテンプレートを直接使用してページを構築することも、自分のニーズに合わせてテンプレートを改造することもできます。 これらのテンプレートは、Dashboard のコンポーネント(入力ボックス、ボタン、メニューなど)と JAKA カスタムサービス(ロボット情報の取得、ロボット情報の設定など)を組み合わせて、さまざまな機能を実現しています。
テンプレートのインポート
ユーザーは Node-RED 内であらかじめ用意されたすべてのテンプレートを見つけ、インポートしてデプロイすることでそのまま利用できます。また、異なるテンプレートに含まれる必要なコンポーネントをインポートし、組み合わせてデプロイ・使用することもできます。
基本概念
レイアウト
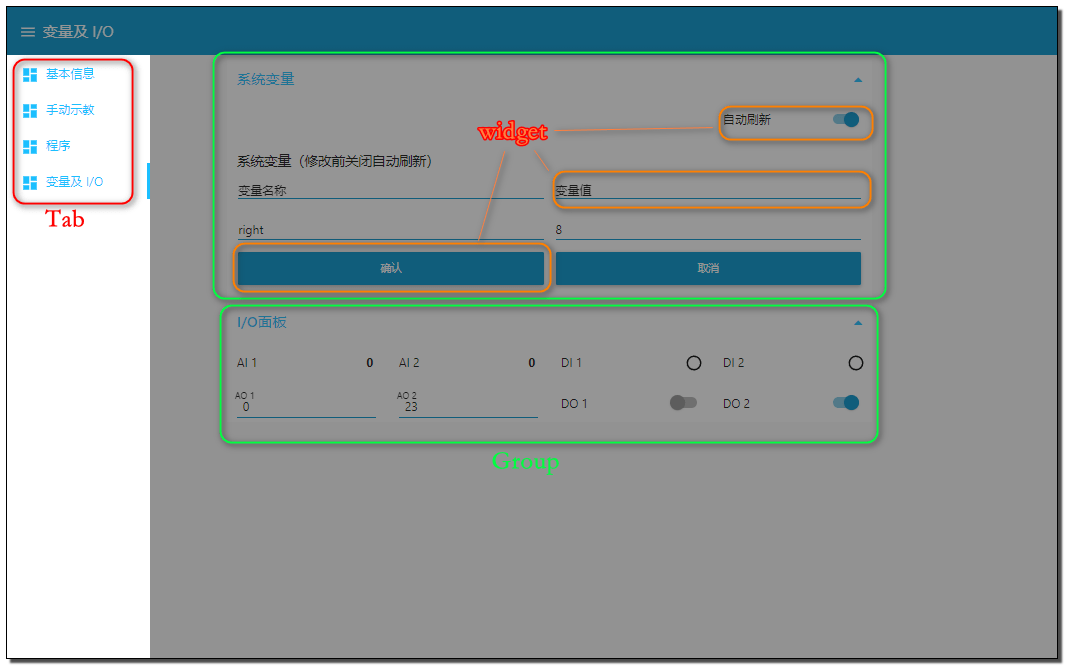
Dashboard ページのレイアウトはグリッドとして考えるべきです。
各タブ(Tab)は1つのページと見なすことができ、1つのタブ内には複数のグループ(Group)を含めることができ、1つのグループ内には複数のウィジェット(widget)を含めることができます。 コンポーネントを編集するときに、そのコンポーネントに Group を指定できます。Group を編集するときに Tab を指定できます。
各 group(グループ)には幅があり、デフォルトでは6「ユニット」です(デフォルトでは1ユニットの幅は48px、間隔は6px)。
group(グループ)内の各 widget(ウィジェット)にも幅があり、デフォルトでは「自動」です。これはグループの幅全体を埋めることを意味しますが、固定のユニット数に設定することもできます。
Dashboard のレイアウトアルゴリズムは常に要素をそのコンテナの左上に配置しようとします。これは、ページ上のグループの位置にも、グループ内のウィジェットの位置にも適用されます。
テンプレートをインポートした後、コンポーネントの位置が乱れる場合があります。layout 設定でレイアウトを復元するか、希望する任意のレイアウトに調整できます。
テンプレート概要
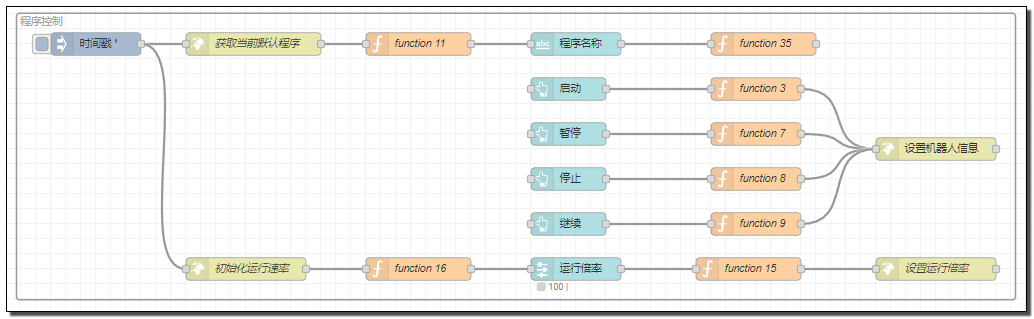
プログラム制御
プログラム制御テンプレートの主な機能は、プログラムの開始、一時停止、再開、停止です。
このテンプレートには、入力ボックス、ボタン、スライダーの使用例が含まれています。
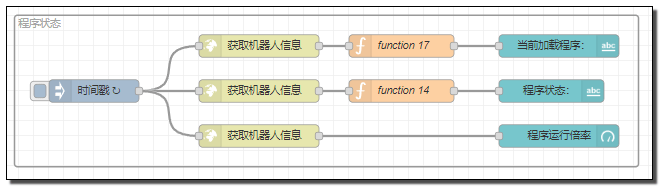
プログラム状態
現在ロードされているプログラムおよびその実行速度、実行状態をリアルタイムで確認できます。
このテンプレートにはメーターコンポーネントの使用例が含まれています。
電源制御
ロボットの電源とイネーブル状態を制御する
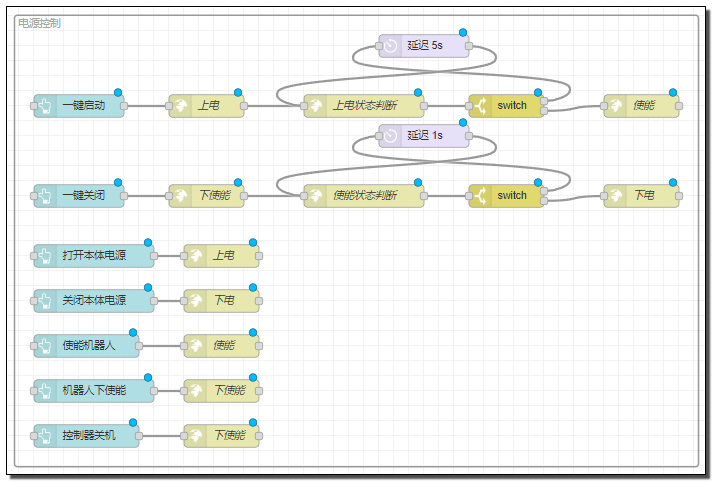
ワンクリック起動機能は、まずロボットに電源を入れ、通電後に自動で状態を循環監視し、電源投入が成功したことを検出すると、自動でイネーブルをオンにします。循環監視の時間は、ディレイノードで自由に調整できます。
ロボット状態
ロボットの各種状態を監視する
このテンプレートには、ロボットのエラーコードとステータスコードを取得できるコンポーネントと、(コントローラー温度、ロボット速度などをリアルタイムで表示する)グラフコンポーネントが含まれています。
説明
デモ動画は仮想マシンで録画しているため、コントローラーの温度と出力データはありません。
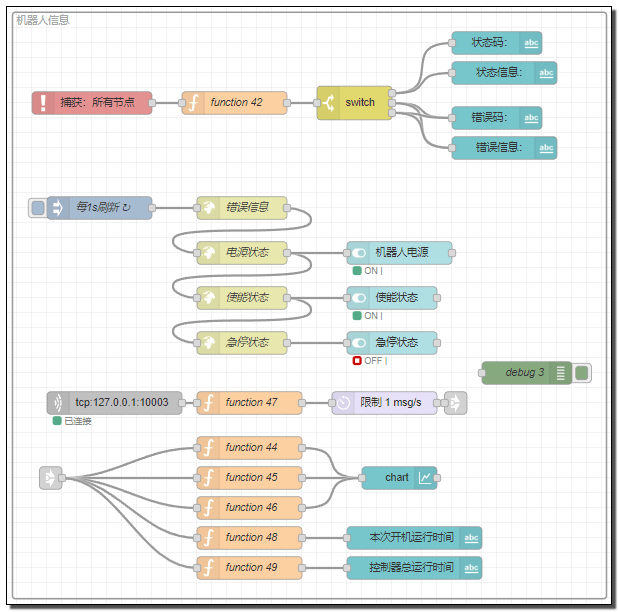
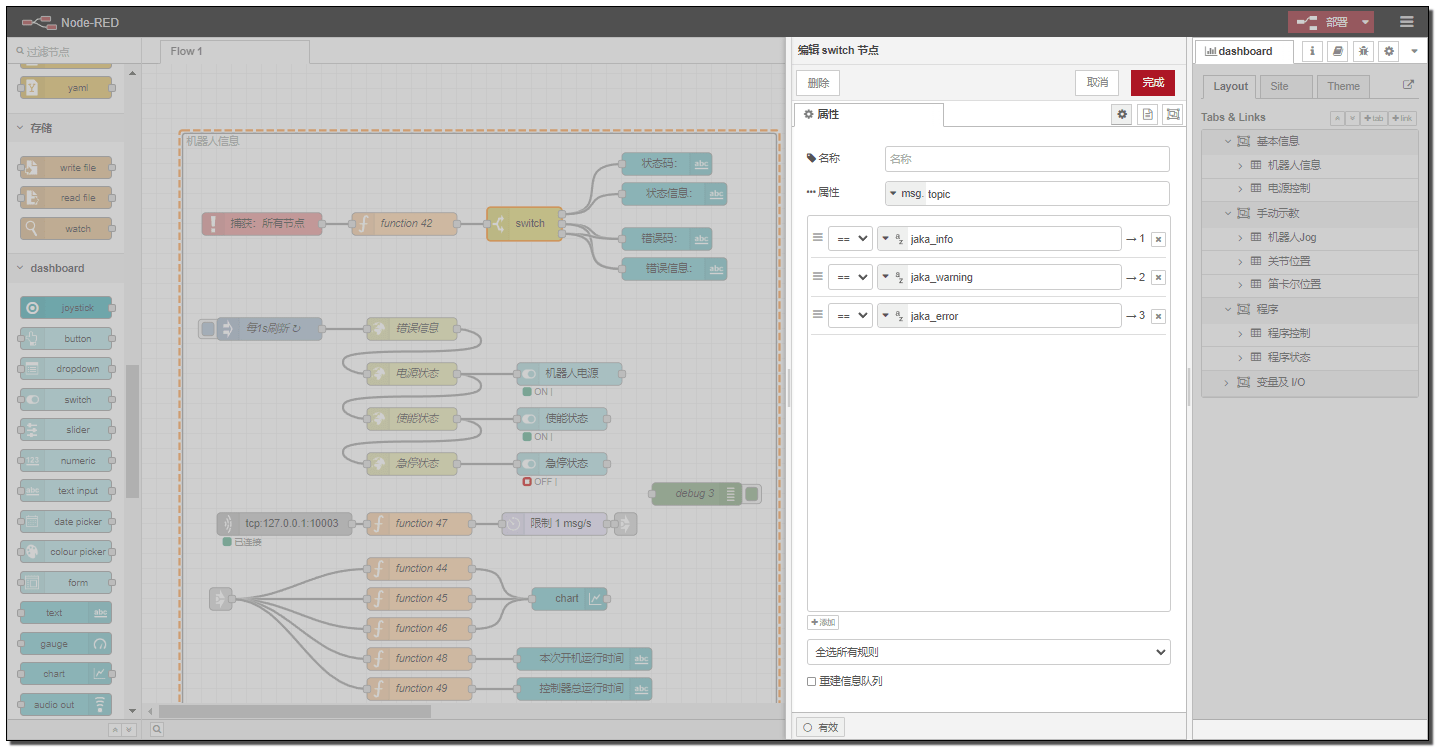
エラーとステータス情報の取得
情報を正確かつ包括的に取得するために、「ロボット情報を取得」ノードでエラー情報を定期的に更新すると同時に、Node-RED の catch ノードを使用してすべてのノードのエラーをキャッチし、その後 switch ノードでフィルタリングと分流を行うことをお勧めします。
「ロボット情報を取得」「ロボット情報を設定」および「ロボット動作制御」ノードによって出力される情報またはエラーには、トピックが含まれており、3種類あります。
- jaka_info:情報
- jaka_warning:警告
- jaka_error:エラー
ステータスアイコン
Dashboard の switch コンポーネントを使用し、カスタムアイコンを選択すると異なる状態を異なるアイコンで表示できます。
グラフ情報
グラフ情報のソースはコントローラーの 10003 ポートであり、tcp in ノードを使用して監視します。高頻度の更新によってページがクラッシュするのを防ぐため、delay ノードを使用してメッセージをスロットルします。 その後、link out ノードで監視された内容を送信し、任意の場所で link in ノードを使用して 10003 ポートから送信された内容を受信することができます。
10003 ポートは 80ms ごとにタイムスタンプ付きのデータをプッシュし、高頻度更新や時間に敏感なデータ(リアルタイムの位置情報、出力、トルクなど)を取得するのに非常に適しています。
ロボットJOG
ジョイスティックでロボットを移動させる
このテンプレートには、ジョイスティックコンポーネントとドロップダウンメニューコンポーネントが含まれています。
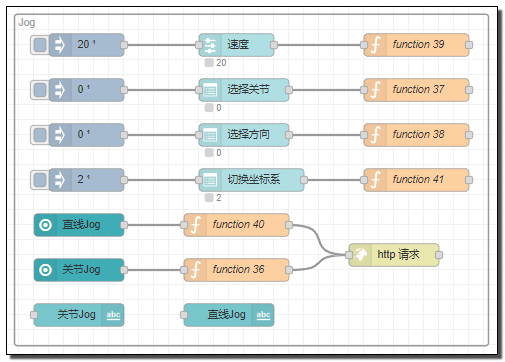
このテンプレートは、リニアJogおよびジョイントJogの両方をサポートしており、一度に操作できるのは1方向または1つの関節のみです。直線ジョグ中にワールド座標系またはツール座標系を切り替えることができます。
位置情報
位置情報をリアルタイムで取得
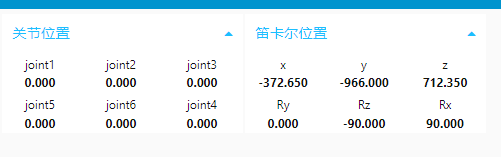
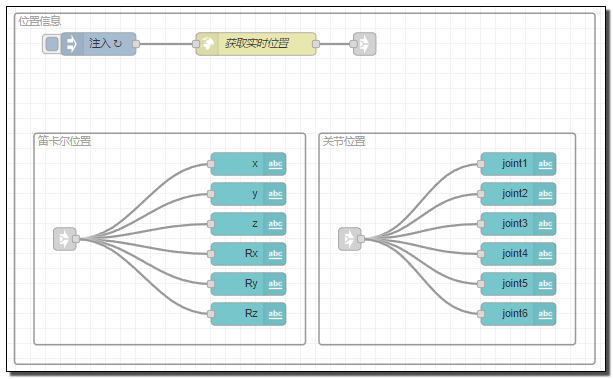
このテンプレートでは、JAKA カスタムサービスの「ロボット情報取得」ノードを使用して位置情報を取得します。HTTP リクエストを使用しているため、データの時間間隔を厳密に保証することはできません。 高頻度で位置データを取得する必要がある場合、または位置データに厳密な時間要件がある場合は、ポート 10003 から返されるデータを代替として使用できます。
システム変数
システム変数の値を監視および設定します。監視データはプログラム実行中のみ正確です。
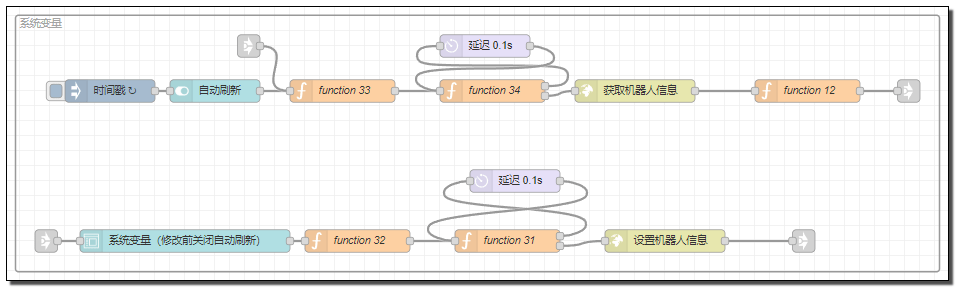
このテンプレートでは、デフォルトで 2 つの変数を監視および設定できます。より多くの変数を追加する場合は、システム変数フォームを修正してください。
注意
新しく追加する変数名は、必ず varName または ``varValue で始まり、その後に番号を付け、順番に増やす必要があります。
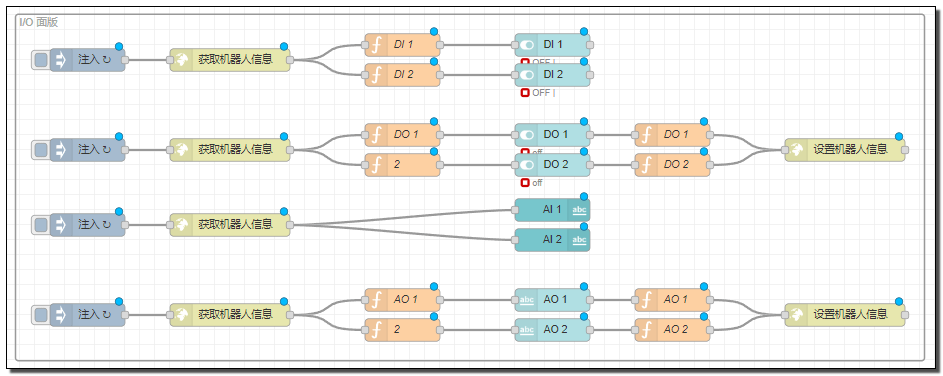
I/O パネル
I/O の値を監視および設定します。
IO 数量を増やす
以下では、DI を 1 つ追加する例を用いて、より多くの IO を追加する方法を説明します。
IO ソースを切り替える
以下では、DI を例に、DI のソースを* Modbus スレーブから制御キャビネットに切り替える*方法を示します。