I/O面板
I/O面板
用户可在IO面板中查看、设置机器人控制柜的电气I/O。
注意:
设置IO时需使机器人处于下使能状态。
固定I/O
固定I/O共有六种类型,其中控制柜I/O、安全I/O、工具端I/O、ModbusI/O为默认I/O。
PROFINET I/O、EtherNet I/O需要先在 设置 中启用后,才会在此处显示。
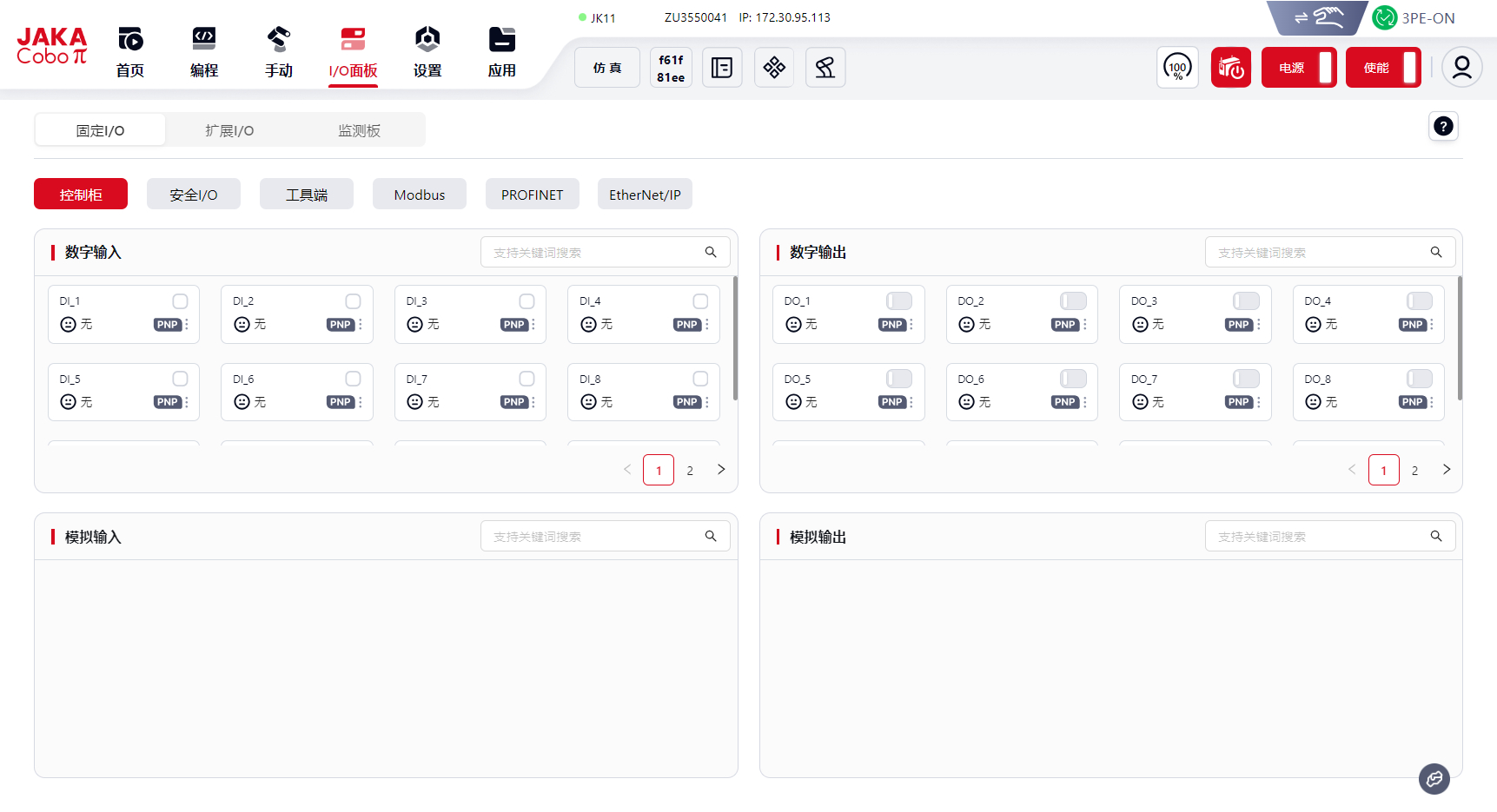
DI/DO信号卡片说明:
在I/O面板中,固定I/O、动态I/O、监测板的DI/DO信号卡片格式均一致,故在此处对DI/DO信号卡片做统一说明。
1 代表DI/DO名称,用户可进行自定义编辑。
2 代表DI/DO功能,用户可进行自定义选择。
3 代表DI/DO状态。
4 代表控制柜用户DI/DO类型,包括PNP型和NPN型。
5 点击该符号或卡片任意空白区域,均可打开设置页面对该DI/DO的名称和功能进行设置。
控制柜
控制柜为标准柜CAB 3.0,基本信息如下:
- 16路DI(可配置NPN/PNP)
- 16路DO(可配置NPN/PNP)
当使用Coboπ连接CAB 3.0时,I/O面板界面会显示控制柜实体信号,也可拖动右侧滚动条查看其他I/O情况。
数字输入(DI)
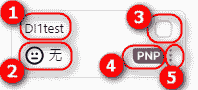
在名称处编辑名称,在功能处点击下拉框,选择功能。
当该DI信号被触发时,所选择的功能被启用。
目前DI信号支持功能如下表:
| 图标 | 功能名称 | 功能说明 | 触发方式 |
|---|---|---|---|
 | 无 | 无 | 无 |
 | 启动程序 | 启动程序DI被触发时,机器人运行编程控制界面当前打开的程序,此DI一般用于使停止的程序重新运行。注:触发此DI前,请确认编程界面的程序已保存。若编程界面存在未保存程序,触发DI后,Coboπ会运行最后一个保存的程序。 | 上升沿信号 |
 | 暂停程序 | 暂停程序DI被触发时,机器人暂停编程控制界面当前打开的程序,触发继续运行程序DI可恢复程序运行。 | 上升沿信号 |
 | 继续运行程序 | 继续运行程序DI被触发时,机器人继续运行编程控制界面当前打开的程序,此DI一般用于使暂停的程序恢复运行。 | 上升沿信号 |
 | 停止程序 | 停止程序DI被触发时,机器人停止编程控制界面当前打开的程序,触发启动程序DI可恢复程序运行。 | 上升沿信号 |
 | 打开本体电源 | 打开电源DI被触发时,机器人上电。 | 上升沿信号 |
 | 关闭本体电源 | 关闭电源DI被触发时,机器人下电。 | 上升沿信号 |
 | 机器人上使能 | 机器人上使能DI被触发时,机器人上使能。 | 上升沿信号 |
 | 机器人下使能 | 机器人下使能DI被触发时,机器人下使能。 | 上升沿信号 |
 | 一级倍率模式 | 一级倍率模式DI被触发时,机器人降速,进入一级倍率模式。 | 低电平信号 |
 | 防护停止 | 防护停止DI被触发时,机器人运动停止。在外部控制状态下能触发防护停止。 | 低电平信号 |
 | 回安全姿态 | 回安全姿态DI被触发时,机器人运动到 设置 - 安全设置 - 机器人姿态 界面中设置的安全姿态位置。 | 高电平信号 |
 | 二级倍率模式 | 二级倍率模式DI被触发时,机器人降速,进入二级倍率模式。 | 低电平信号 |
 | 清除碰撞 | 清除碰撞DI被触发时,解除机器人碰撞报警。 | 上升沿信号 |
 | 进入拖拽模式 | 进入拖拽DI被触发时,机器人进入拖拽模式。 | 上升沿信号 |
 | 退出拖拽模式 | 退出拖拽DI被触发时,机器人退出拖拽模式。 | 上升沿信号 |
注:
- 二级倍率应小于一级倍率。
- 触发功能I/O时检测的是边沿信号(上升沿或下降沿),为避免网络通信波动带来的延迟影响到功能I/O的触发,在边沿信号前后的电平信号建议至少保持500 ms。
数字输出(DO)
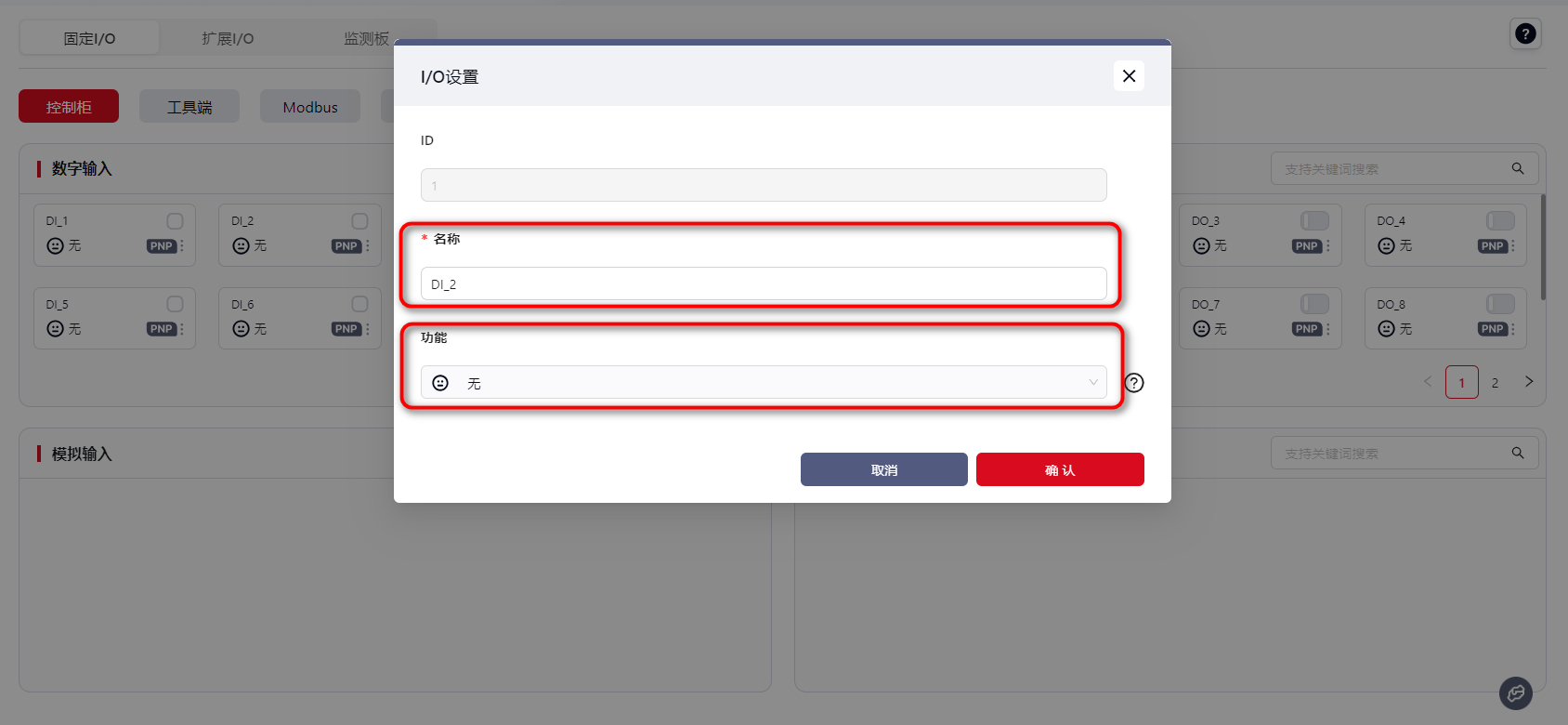
在名称处编辑名称,在功能处点击下拉框,选择功能。
点击确认后,该DO信号将实时反应所绑定的系统状态量的状态。
目前DO信号支持绑定的状态如下表所示:
| 图标 | 机器人状态 | 功能说明 | 信号状态 |
|---|---|---|---|
| 无 | 无 | 无 |
 | 空闲 | 空闲表示机器人未运行程序。 | 高电平信号 |
| 程序暂停 | 程序暂停表示编程控制界面当前打开的程序暂停。 | 高电平信号 |
| 程序运行 | 程序运行表示机器人运行编程控制界面当前打开的程序。 | 高电平信号 |
 | 错误 | 错误表示机器人触发碰撞报警。 | 高电平信号 |
 | 已上电 | 已上电表示机器人处于上电状态。 | 高电平信号 |
| 已使能 | 已使能表示机器人处于上使能状态。 | 高电平信号 |
 | 运动中 | 运动中表示机器人处于运动状态(运行程序运动,手动控制,二次开发控制运动等)。 | 高电平信号 |
 | 静止 | 静止表示机器人处于静止状态(程序暂停,未运行程序,程序结束,等待信号等)。 | 高电平信号 |
| 已开机 | 已开机表示控制柜处于上电状态。 | 高电平信号 |
 | 急停状态 | 急停状态表示机器人运动停止,且下电下使能。 | 高电平信号 |
| 一级倍率状态 | 一级倍率状态表示机器人处于一级倍率模式。 | 高电平信号 |
| 二级倍率状态 | 二级倍率状态表示机器人处于二级倍率模式。 | 高电平信号 |
| 防护停止状态 | 防护停止状态表示机器人运动停止。 | 高电平信号 |
 | 安全姿态 | 安全姿态为用户在 设置 - 安全设置 - 机器人姿态 界面中自定义的安全姿态位置,当机器人处于此位置时,触发此信号。 | 高电平信号 |
| 拖拽状态 | 拖拽状态表示机器人处于拖拽模式。 | 高电平信号 |
 | 碰撞状态 | 碰撞状态表示机器人发生碰撞。 | 高电平信号 |
安全I/O
控制柜支持配置:
- 16路安全DI(默认配置安全模式,PNP)
- 16路安全DO(默认配置安全模式,PNP)
此处只是显示安全I/O的状态,配置需要进入设置-安全设置-专用安全I/O页面:专用安全I/O。
若切换成了通用I/O模式,则此处页面为:
工具端
机器人本体末端工具TIO有V2、V3两种版本,此处只说明V3版本TIO的使用方法,如需其他版本的使用说明,请联系节卡技术人员。
当使用末端工具TIO时,可以在 设置 - 硬件与通讯 - 末端I/O 处进行配置,也可以在此处操作。
机器人本体V3版工具端支持2路数字输入、2路数字输出以及2路模拟输入。
其中2路数字输出可以复用为高速RS485通道,2路模拟输入可以复用为低速RS485通道。
数字输入
TIO功能中2路DI可以分别设置为不同的输入模式,即NPN型输入或PNP型输入。
在TIO供电后,两路DI立即默认配置成NPN输入。
具体设置方法同控制柜数字输入
数字输出
TIO功能中2路DO可以复用为RS485通道引脚。
其作为DO时,也可以分别设置为不同的输出模式,如NPN输出、PNP输出、推挽输出等。
在TIO供电后,两路DO立即默认配置成NPN输出。
具体设置方法同控制柜数字输出
注意:
2路DO做RS485通道使用时,必须同时设置为RS485通道1模式。
修改其中一个DO的模式为RS485通道1时,另一路也将被设置为RS485通道1;当一路DO从RS485通道1模式配置成其他模式时,另一路会自动被设置成NPN输出模式。
模拟输入
TIO功能提供两路可复用的模拟输入通道,2路模拟输入引脚可以复用为RS485通道2。
TIO供电后默认被用作模拟输入。
模拟量电压范围0-10V,对应的显示范围为0-4096,对应方式为0V对应0,10V对应4096,精度为0.1V。
注:
无论TIO是否连接外部设备,AI显示数值均不为0,当TIO未连接外部设备时,显示数值根据TIO板型号而异,约为400-500或700-800。
Modbus
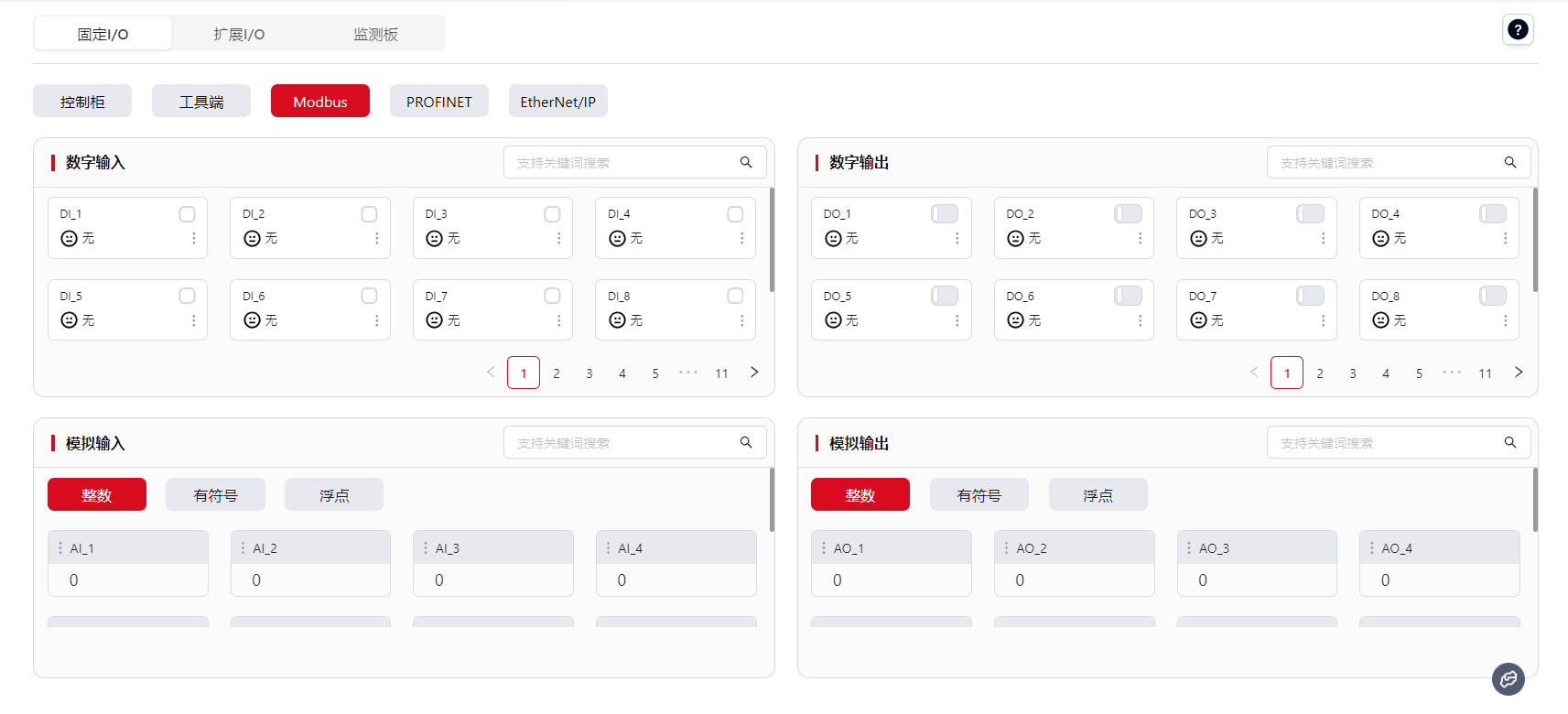
JAKA机器人控制柜支持Modbus通讯协议,可以作为Modbus通讯从站和外部设备进行通讯交互。
Modbus窗口中I/O信号为机器人与外部设备通过Modbus通讯可访问的I/O数据,控制器作为Modbus设备支持数字输入与数字输出各128个;Modbus整数模拟输入与整数模拟输出各16个;Modbus有符号数模拟输入与有符号数模拟输出各16个;Modbus浮点数模拟输入与浮点数模拟输出各32个。
Modbus寄存器地址定义详见:Modbus I/O地址表。
PLC端通讯配置参考JAKA通讯使用手册。
数字输入(DI)/ 输出(DO)
数字输入/输出界面可以监控Modbus中数字输入状态。
DI:DI信号被触发时,则启动所选功能;
DO:DO实时显示其选择功能的状态。
现支持的功能及详细的功能说明、设置方法同控制柜数字输入、控制柜数字输出
模拟输入(AI)/ 输出(AO)
模拟输入/输出界面可以监控Modbus模拟信号量。
Modbus数值为单精度浮点型,且只保留七位有效数字,当超出有效位时,会四舍五入。
具体设置方法同上。
PROFINET
提示:
PROFINET 与后文的 EtherNet/IP 都需要在 设置 - 硬件与通讯 - PROFINET设置 与 EtherNet/IP设置 中启用后,方才会在 I/O面板 显示。
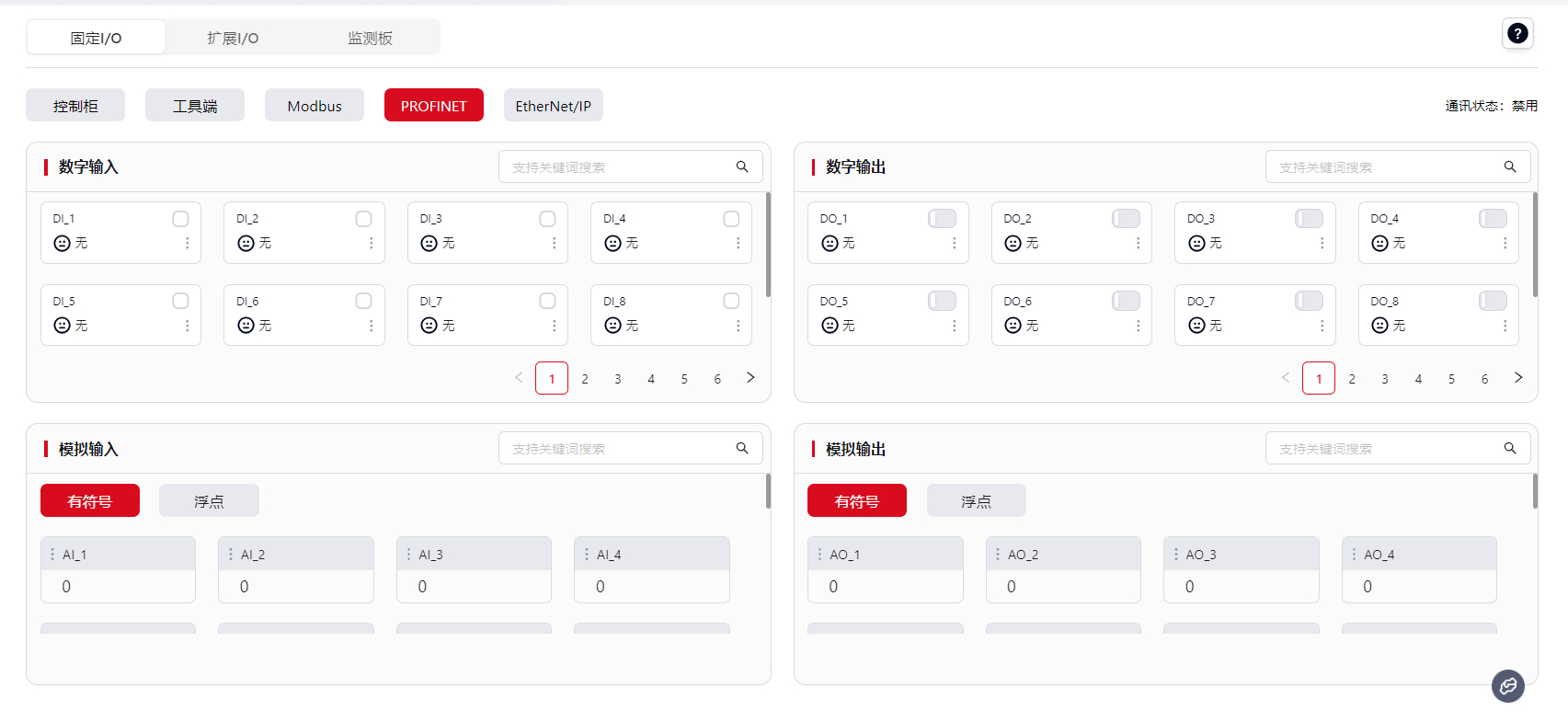
控制柜支持PROFINET通讯协议,可以作为PROFINET I/O从站和外部设备进行通讯交互。
PROFINET窗口中I/O信号为机器人与外部设备通过PROFINET通讯可访问的I/O数据,控制器作为PROFINET设备支持数字输入与数字输出各64个;有符号数模拟输入与有符号数模拟输出各32个;浮点数模拟输入与浮点数模拟输出各32个。
PROFINET寄存器地址定义详见:PROFINET I/O地址表。
GSDML–XML形式设备描述文件联系JAKA技术人员获取。
PLC端通讯配置参考JAKA通讯使用手册。
PROFINET数字输入、数字输出、模拟输入和模拟输入配置方式与Modbus相同。
EtherNet/IP
控制柜支持EtherNet/IP通讯协议,可以作为EtherNet/IP通讯“适配器”与外部设备通讯交互。
EtherNet/IP窗口中I/O信号为机器人与外部设备通过EtherNet/IP通讯可访问的I/O数据,控制器作为EtherNet/IP设备支持数字输入与数字输出各64个;EtherNet/IP有符号数模拟输入与有符号数模拟输出各24个;EtherNet/IP浮点数模拟输入与浮点数模拟输出各24个。
EtherNet/IP寄存器地址定义详见:EtherNet/IP I/O地址表。
EDS形式设备描述文件联系JAKA技术人员获取。
PLC端通讯配置参考JAKA通讯使用手册。
EtherNet/IP数字输入、数字输出、模拟输入和模拟输入配置方式与Modbus相同。
扩展I/O
Modbus
扩展I/O支持Modbus TCP/IP和Modbus RTU通讯方式。
用户可在此处查看已配置好的Modbus从站信息及状态:
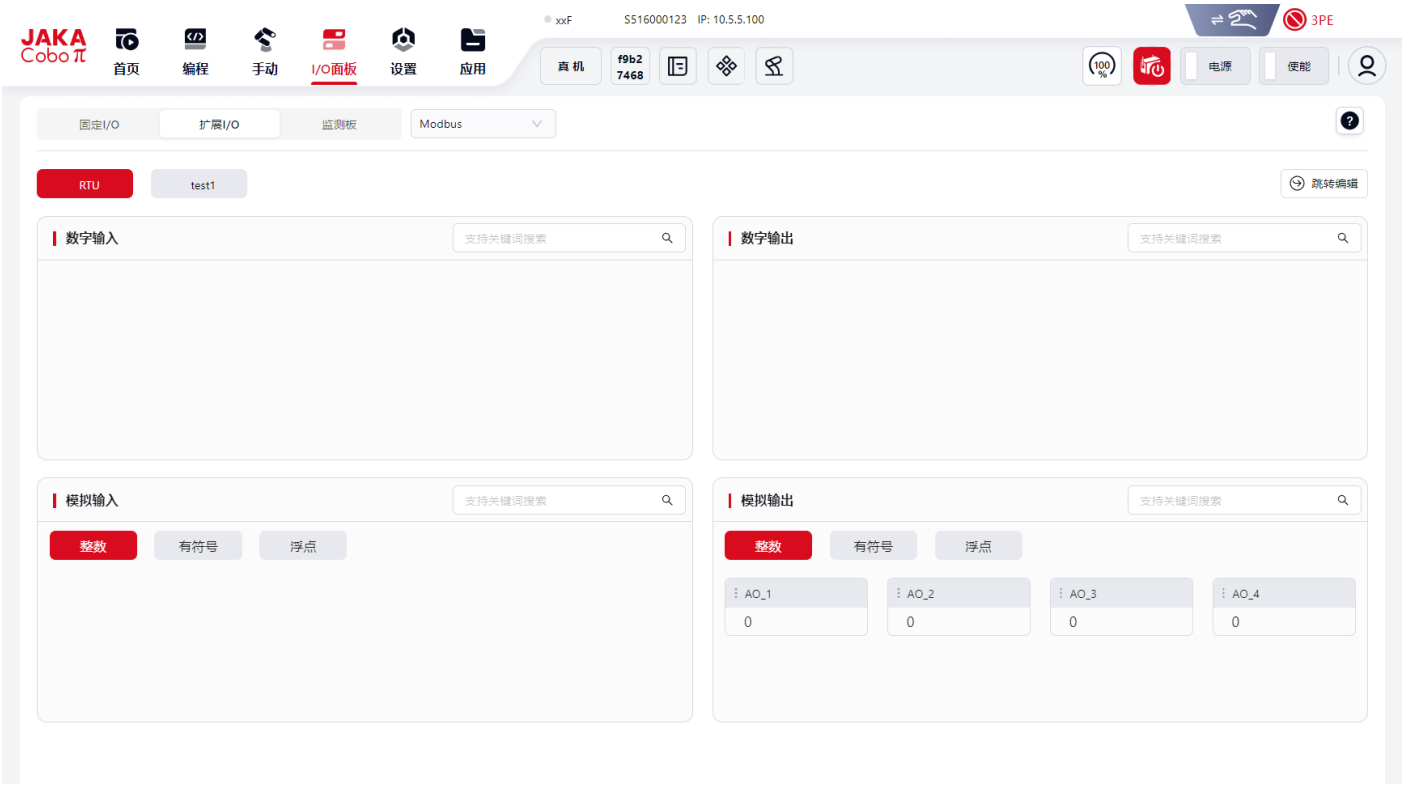
具体配置请点击跳转编辑按钮、自动跳转至 设置 - 硬件与通讯 - Modbus设置 - 从站管理 页面,点击新增,开始配置。
PROFINET
用户可在此处查看已配置好的PROFINET从站信息及状态:
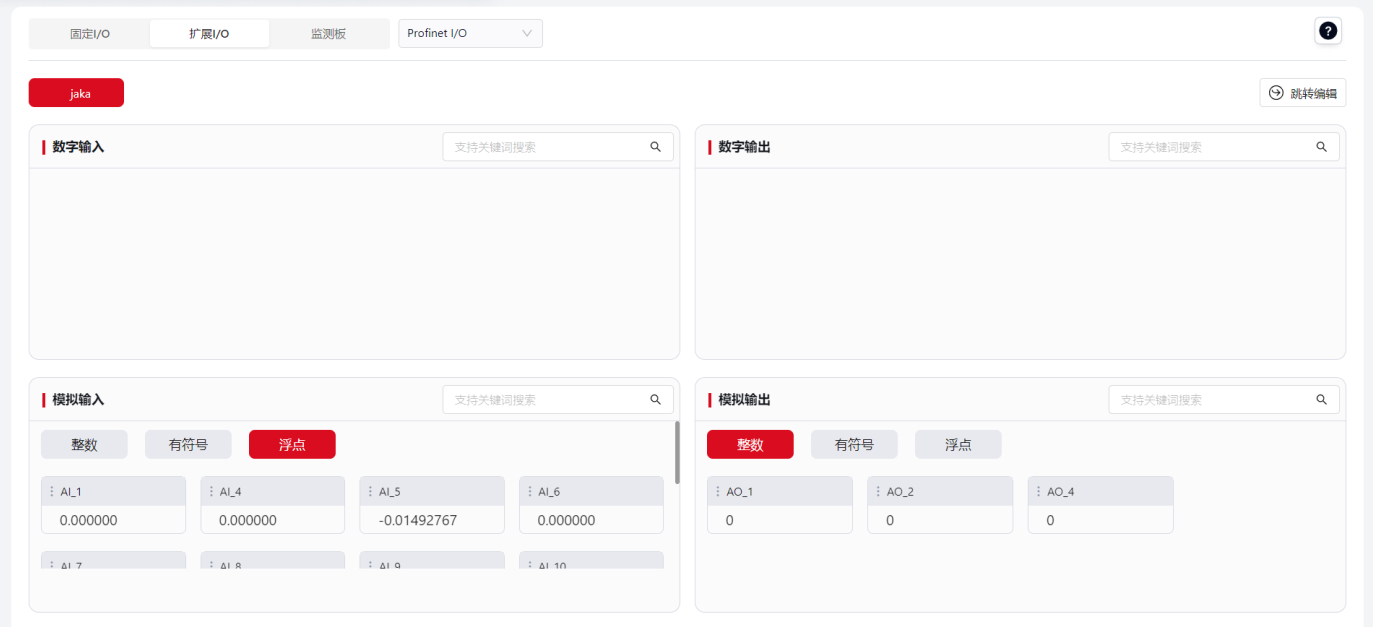
具体配置请点击跳转编辑按钮、自动跳转至 设置 - 硬件与通讯 - 拓展通讯 页面。
提示:
在设置-拓展通讯中配置了几个从站,此处就会显示几个从站卡片。
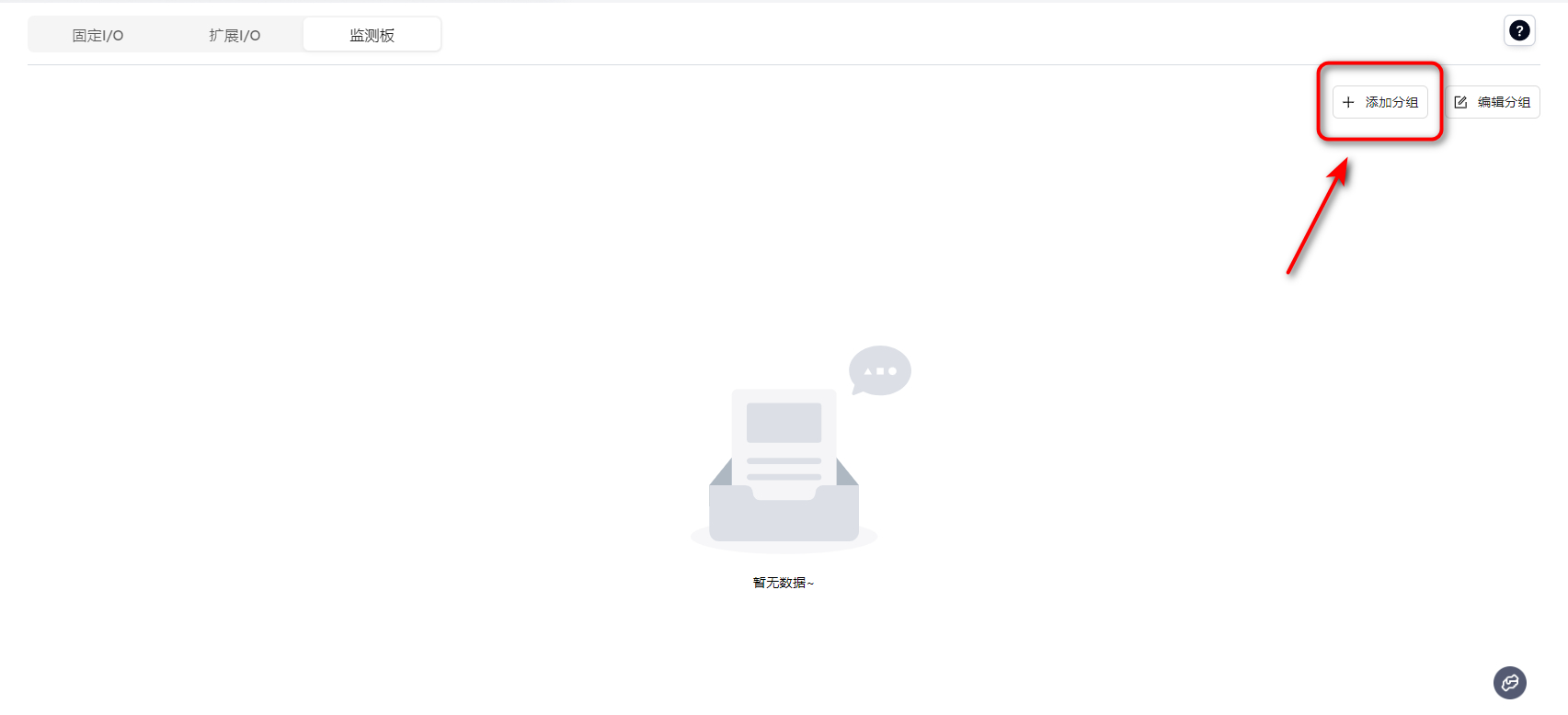
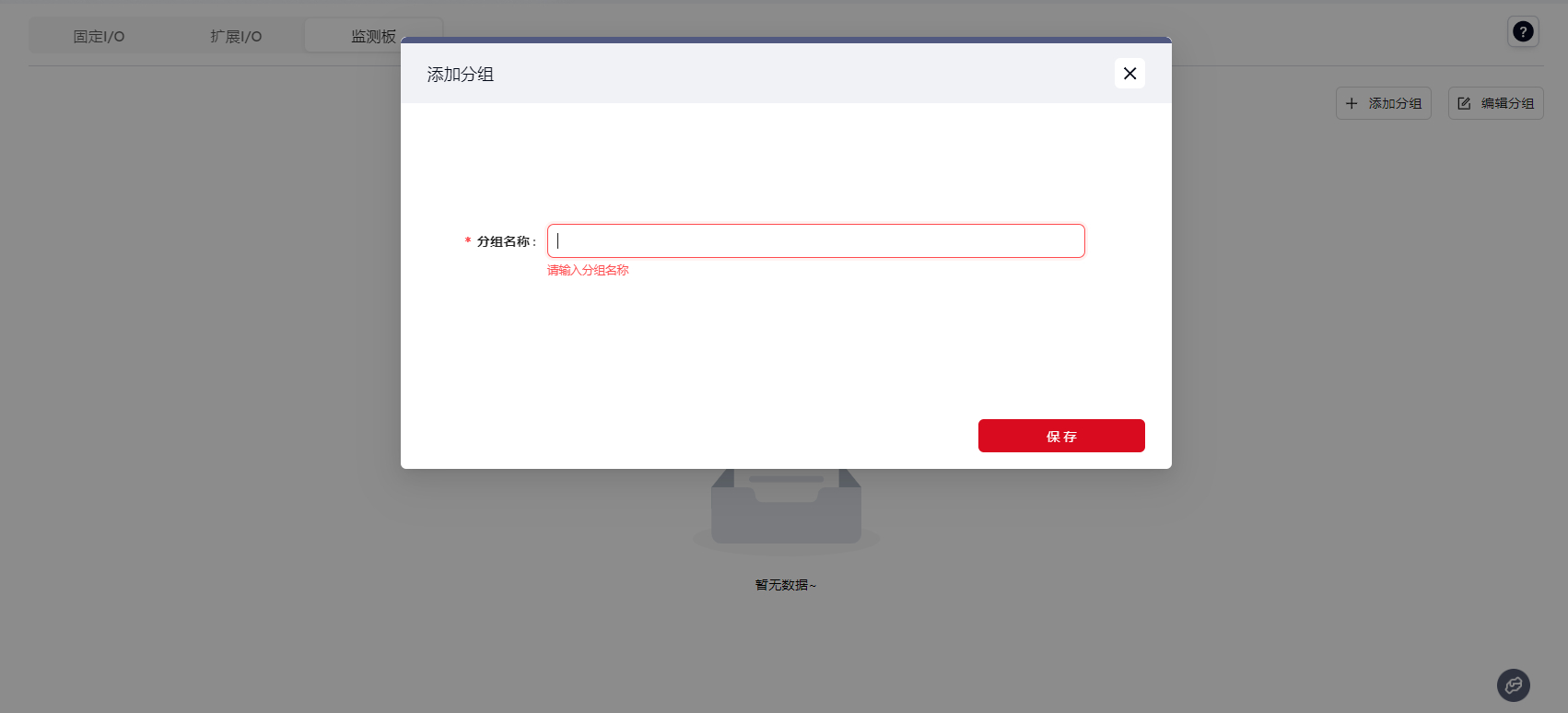
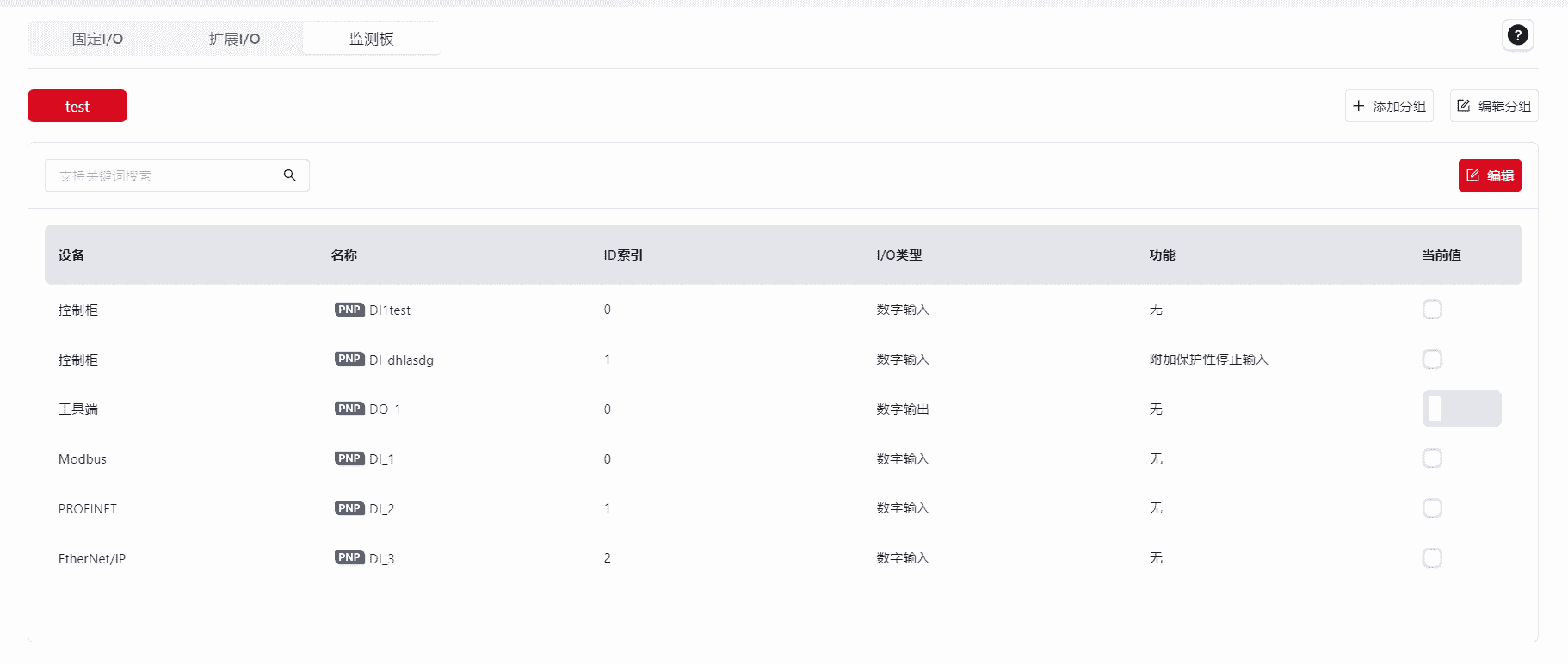
监测板
用户可在此页面将已有的固定I/O和扩展I/O添加至此处,方便在运行程序时统一查看。
具体操作步骤如下:
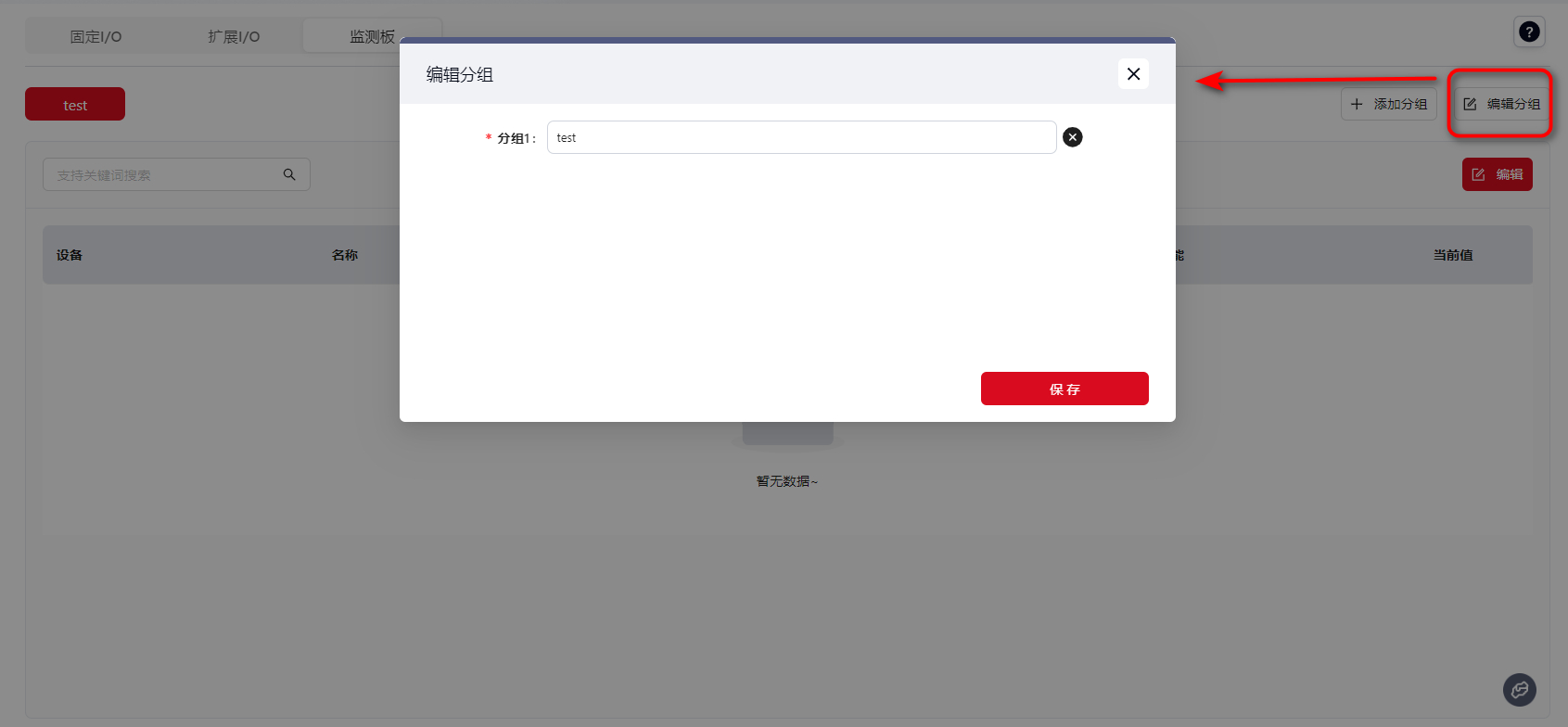
- 点击
添加分组
- 输入
分组名称并保存
- 保存好的分组会显示在页面左上方。然后点击
编辑
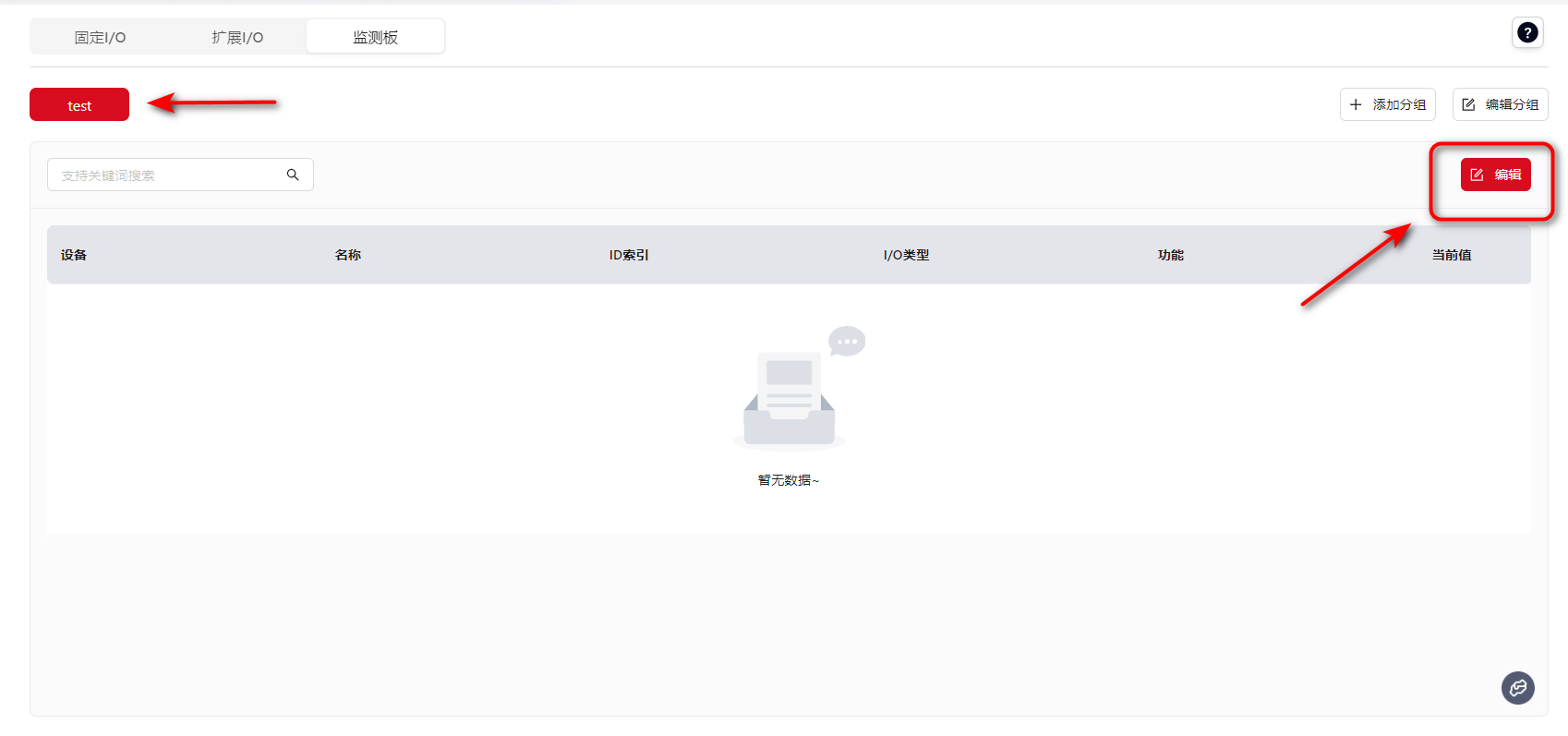
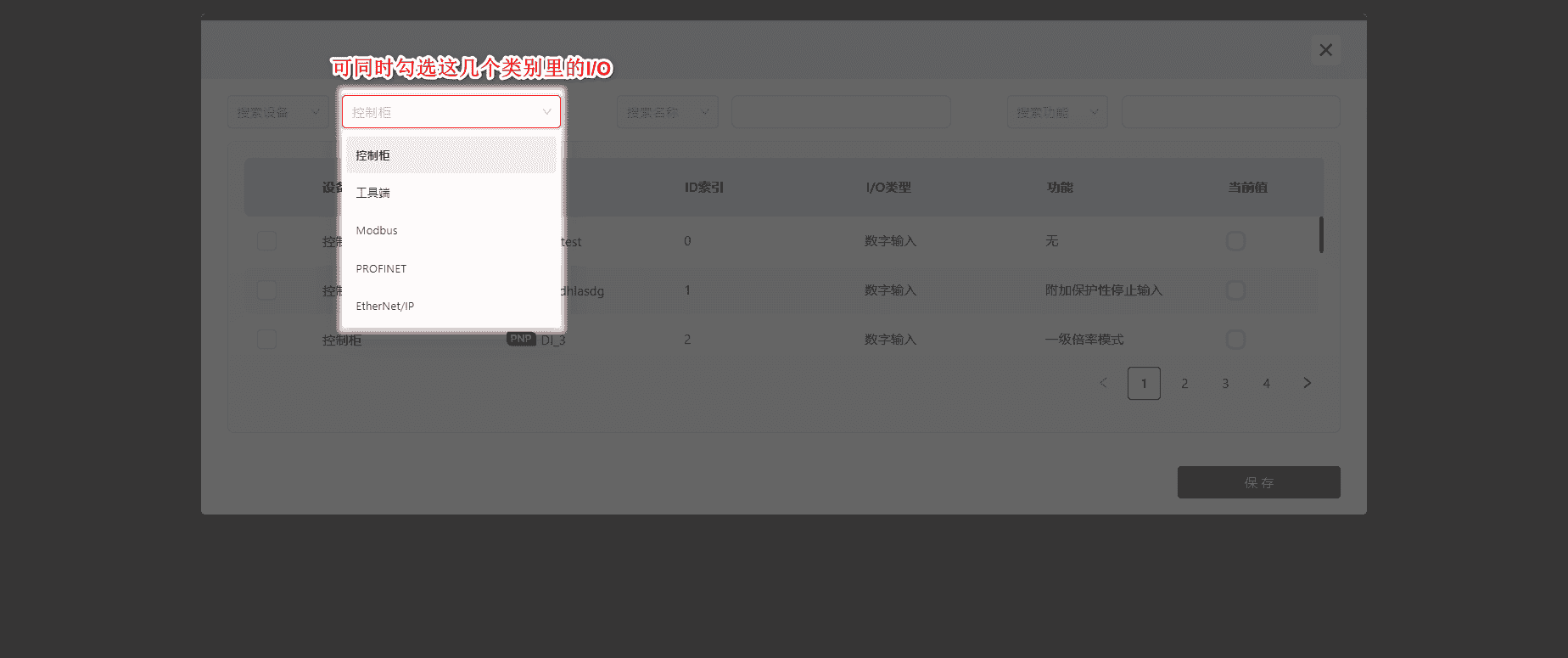
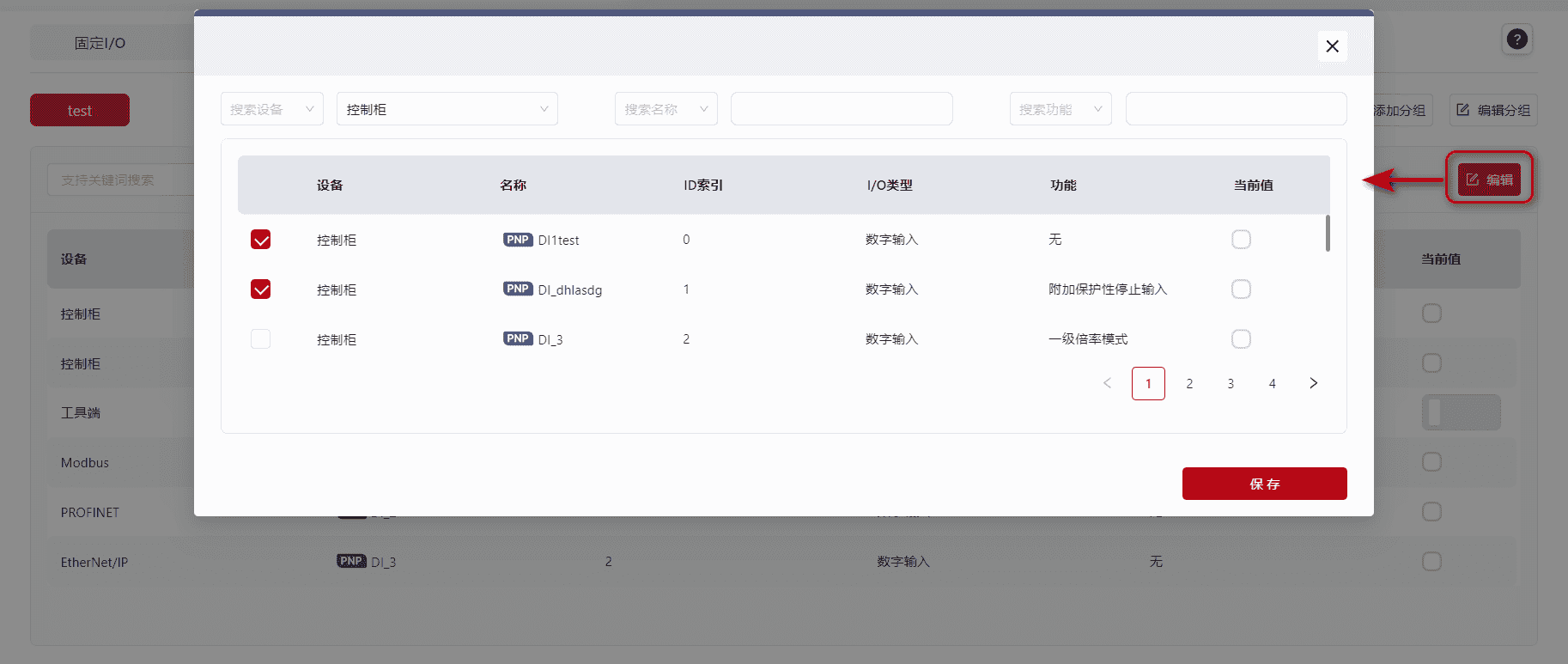
- 在跳出的方框中,根据实际情况选择需要的I/O
可在 搜索设备 处的下拉框里选择I/O所属类别;
或是在 搜索名称 和 搜索功能 处直接搜索所需I/O的关键字
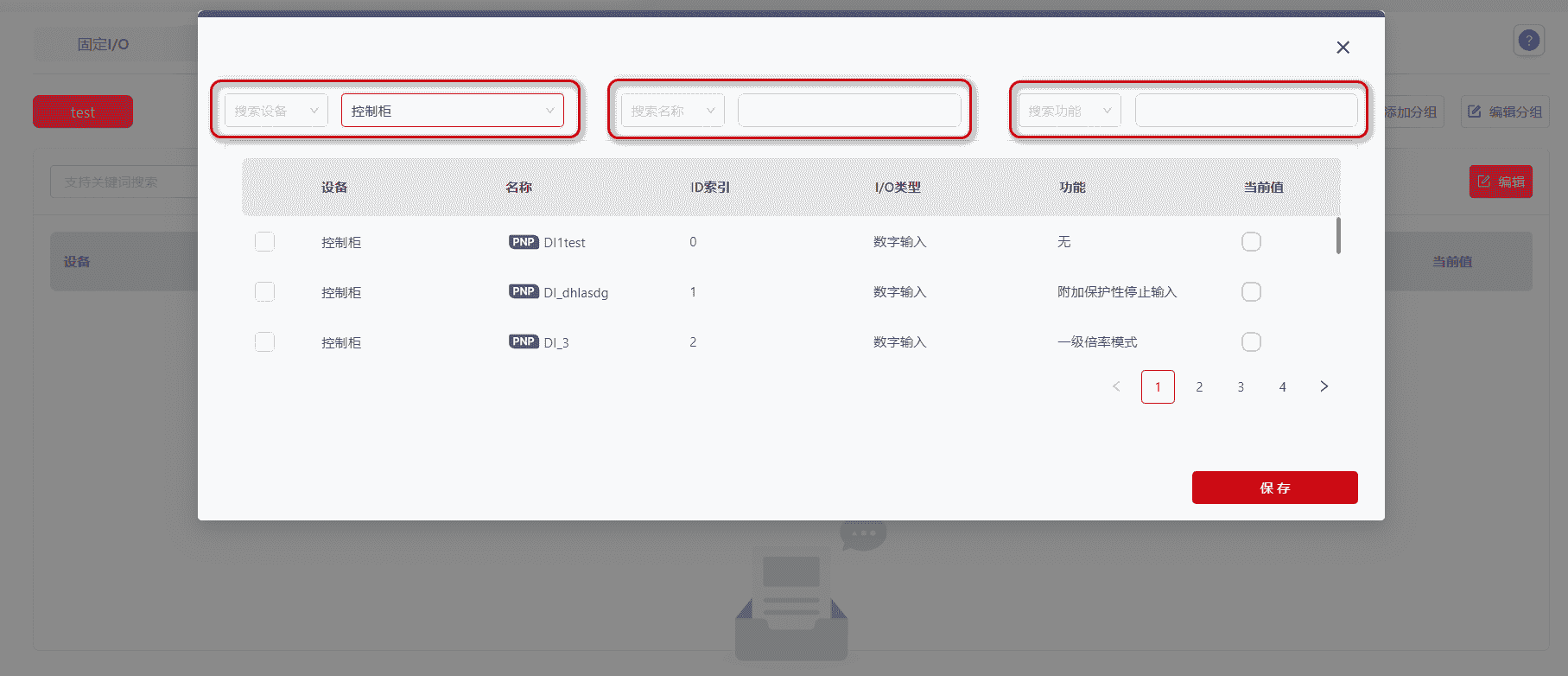
- 勾选所需I/O,点击
保存
提示:
可在不同的设备里同时勾选不同的I/O
- 保存后,所选I/O都会隶属于同一分组,且将在同一界面展示出来
- 点击
编辑会跳出勾选框,用户可在此框内撤销之前的选定I/O项
- 点击
编辑分组会跳出编辑框,用户可在此框内修改分组名,也可点击×直接删除当前分组
- 设置好的监测板内容也可在
编程页面查看