顶部导航栏
顶部导航栏
顶部导航栏有四个功能区:
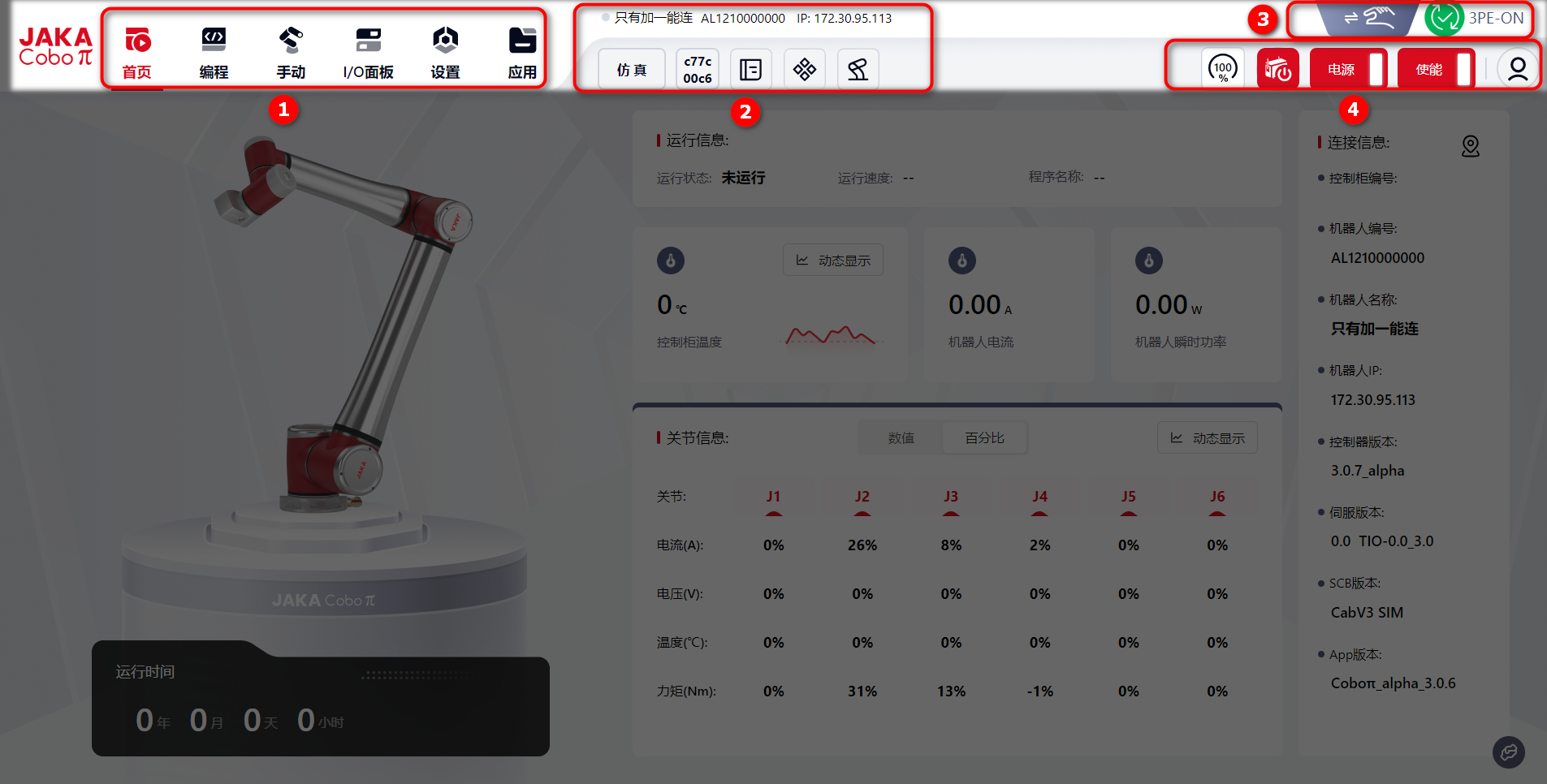
- 主菜单
- 辅助功能
- 手/自动模式及三位置使能
- 机器人控制按钮
主菜单

主菜单分为六个板块:首页、编程、手动、IO面板、设置、应用。
每个板块的具体使用指南请跳转至相应页面阅读。
辅助功能

机器人信息显示
从左到右依次显示了机器人名称、编号及IP。
点击该区域会出现窗口,显示更详细的机器人相关信息:

提示:
该窗口属于 集合工具包 中的一个功能,可点击连接查看。
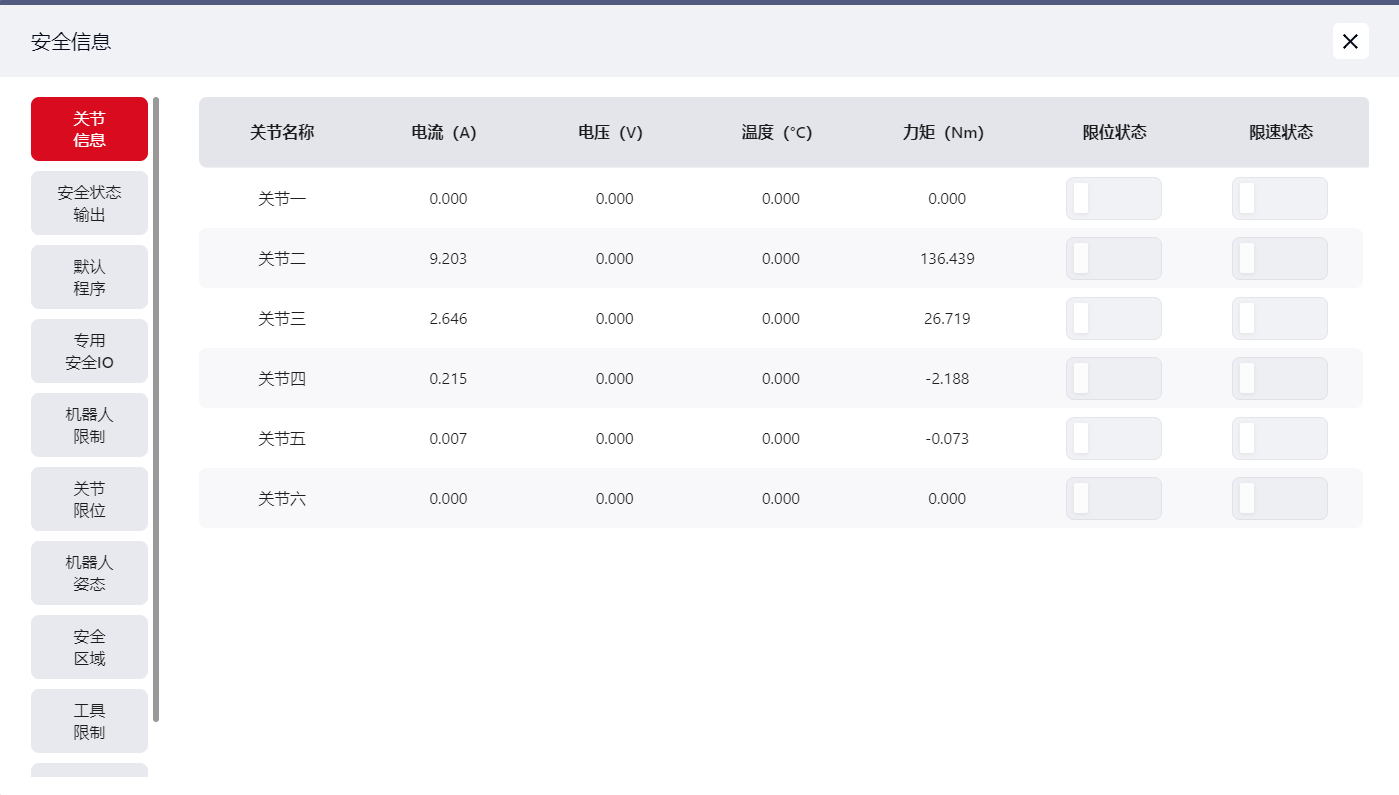
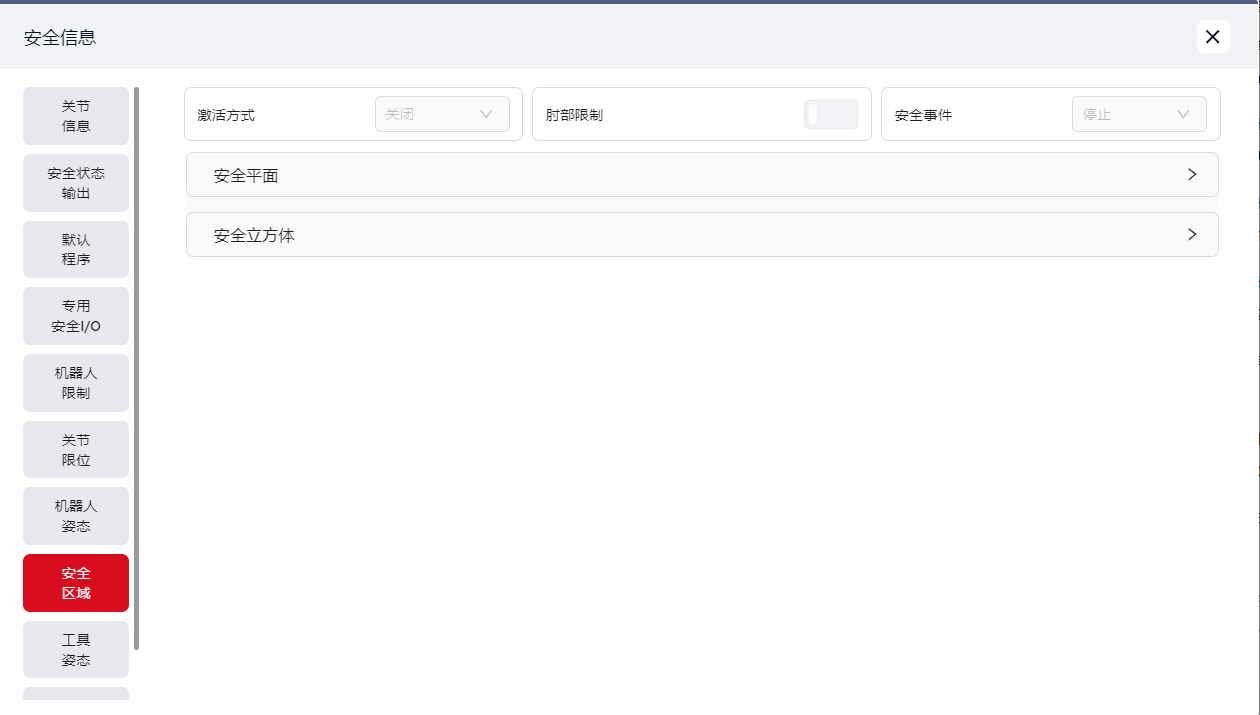
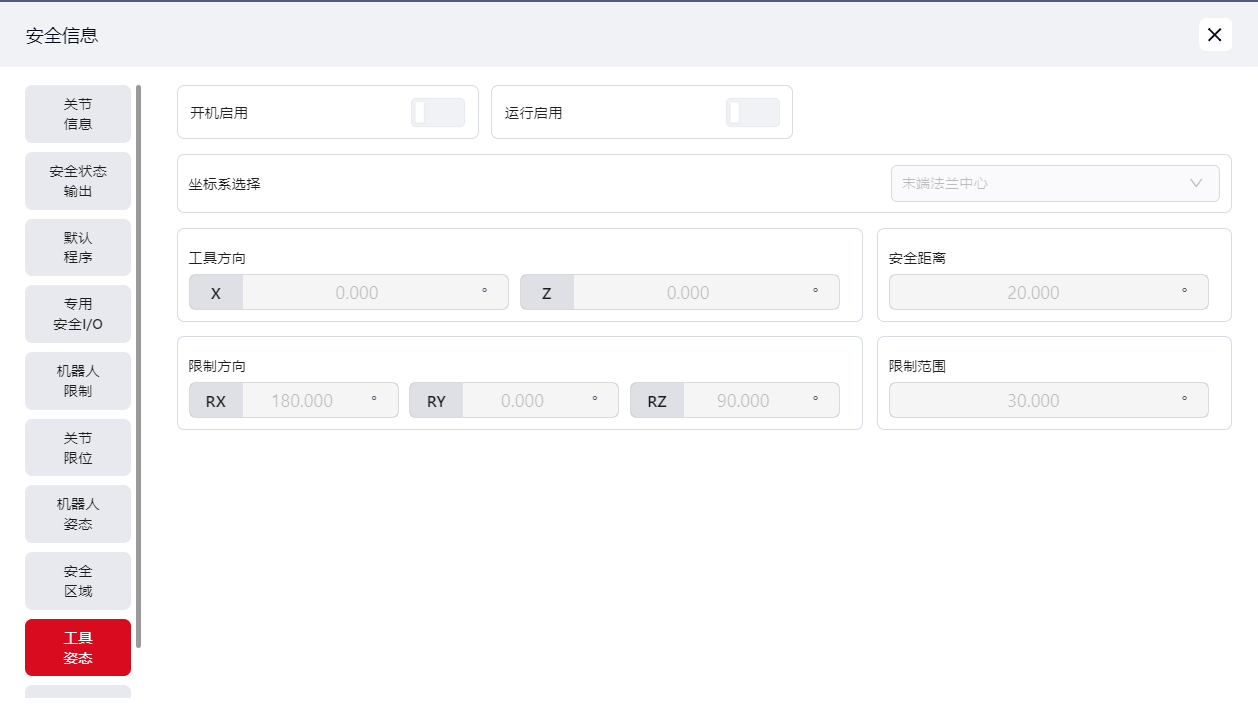
查看安全信息
安全信息包括:
关节信息
安全状态输出

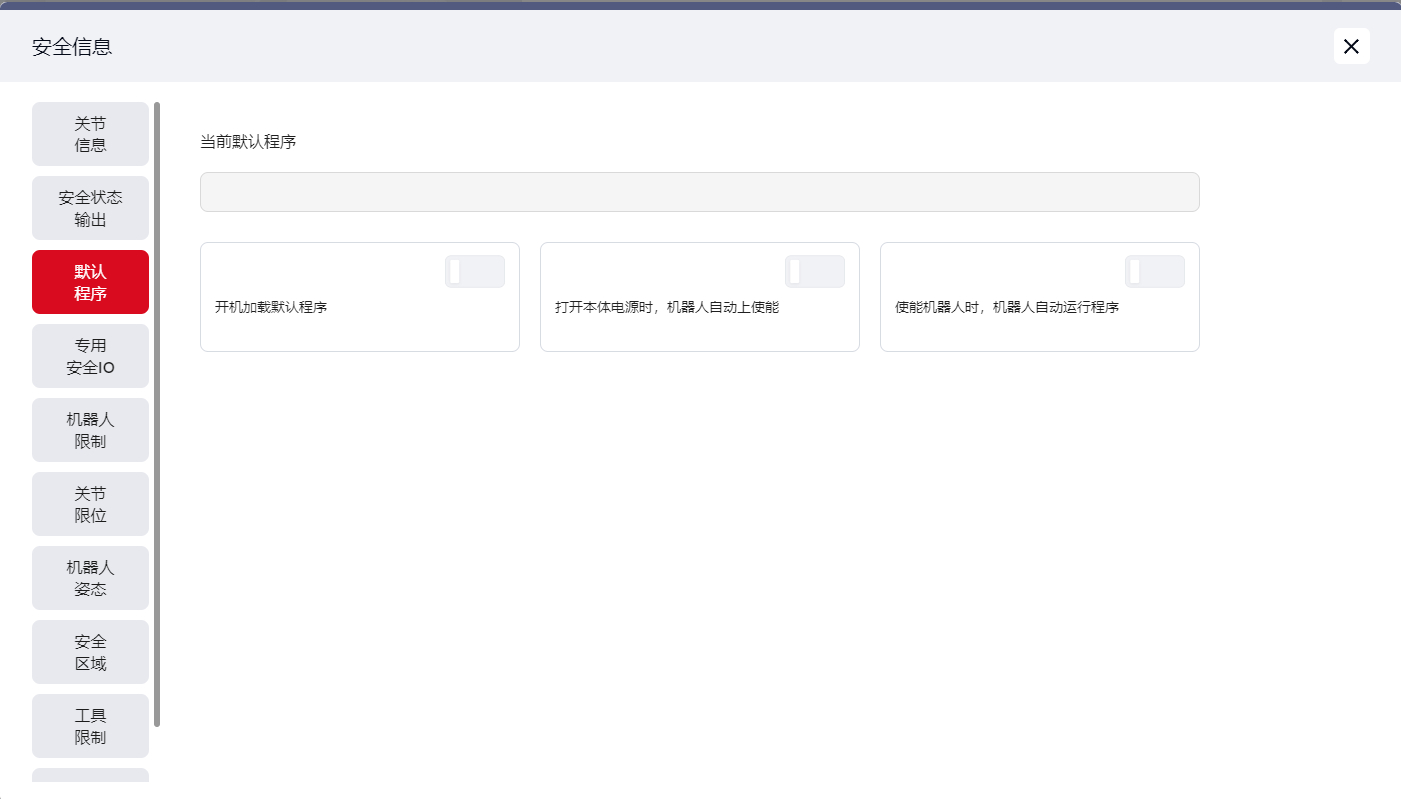
默认程序
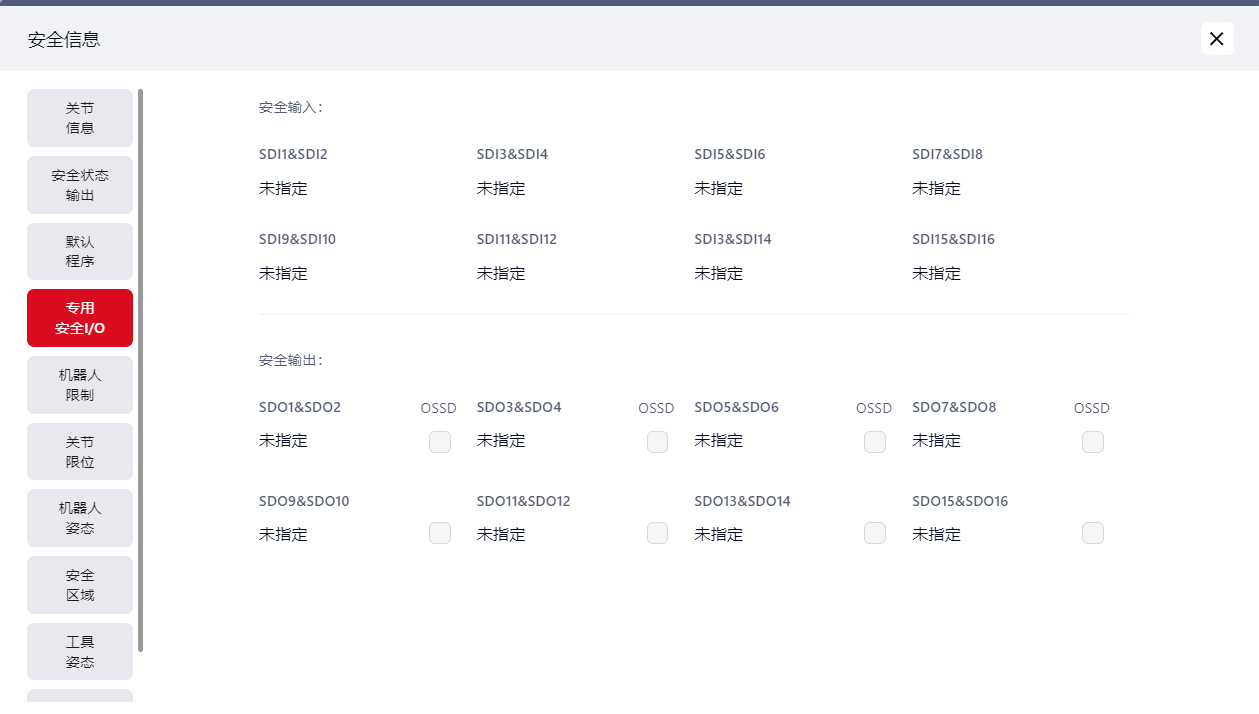
专用安全IO
机器人限制

关节限位

机器人姿态
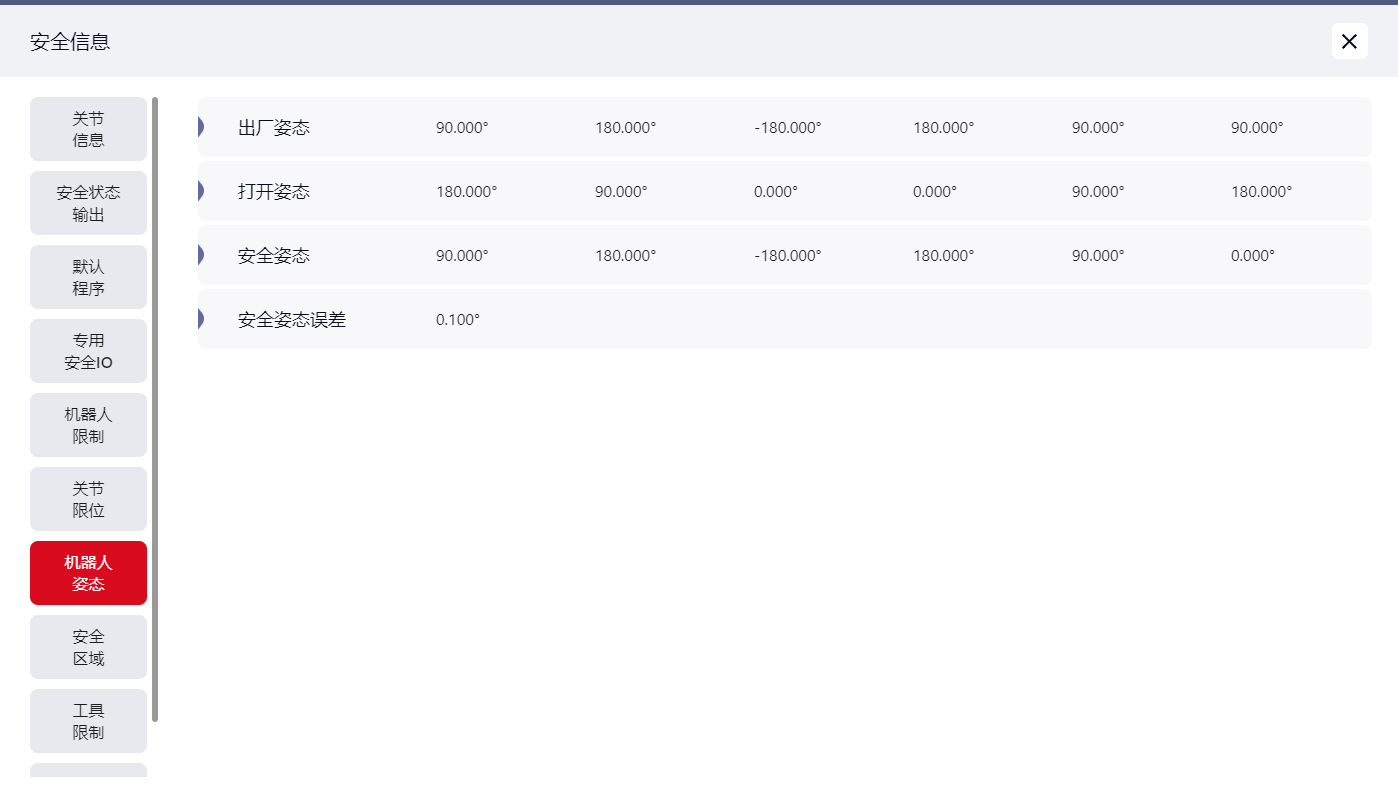
安全区域
工具姿态
操作安全

日志
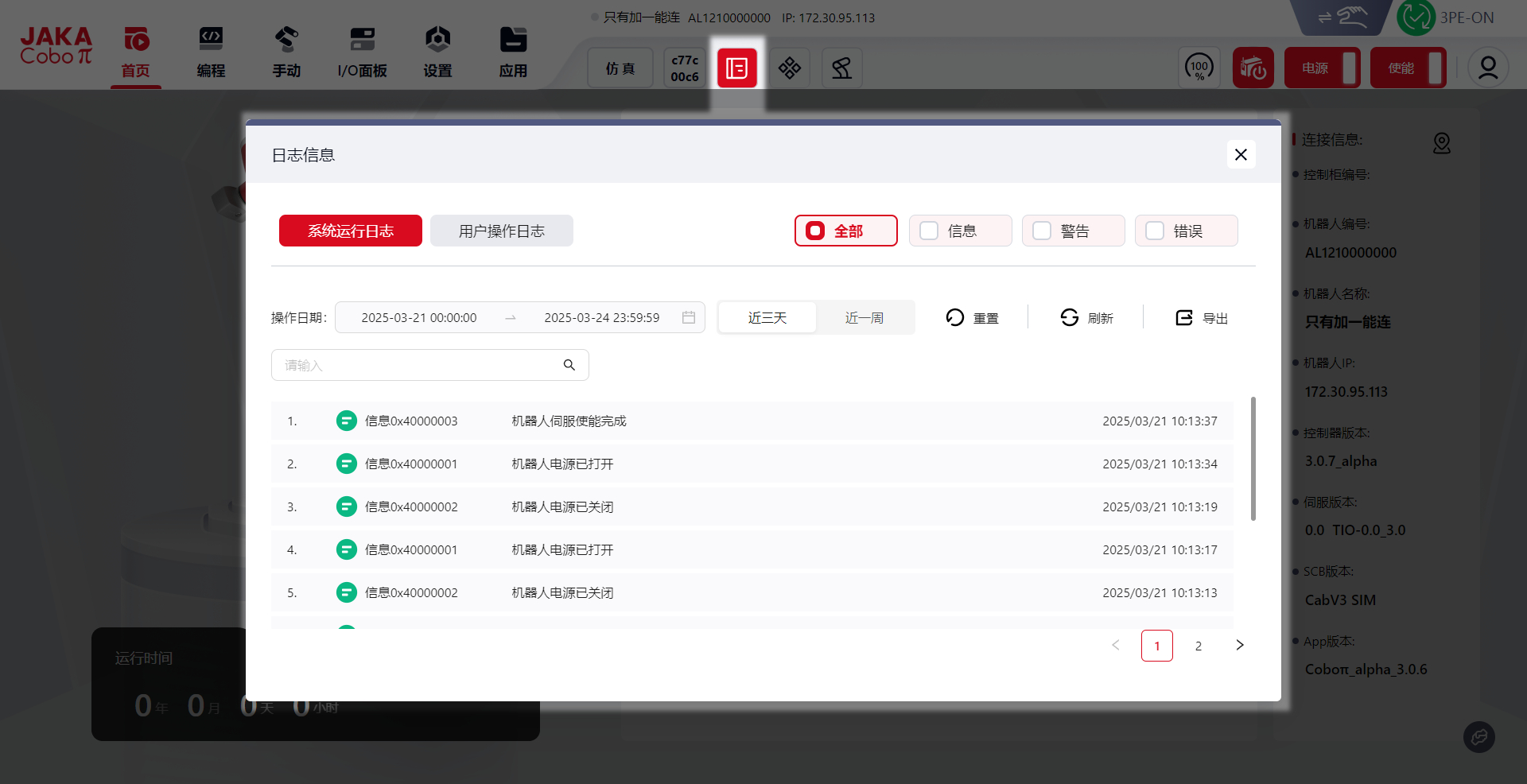
日志分为系统运行日志 及 用户操作日志 :
系统运行日志
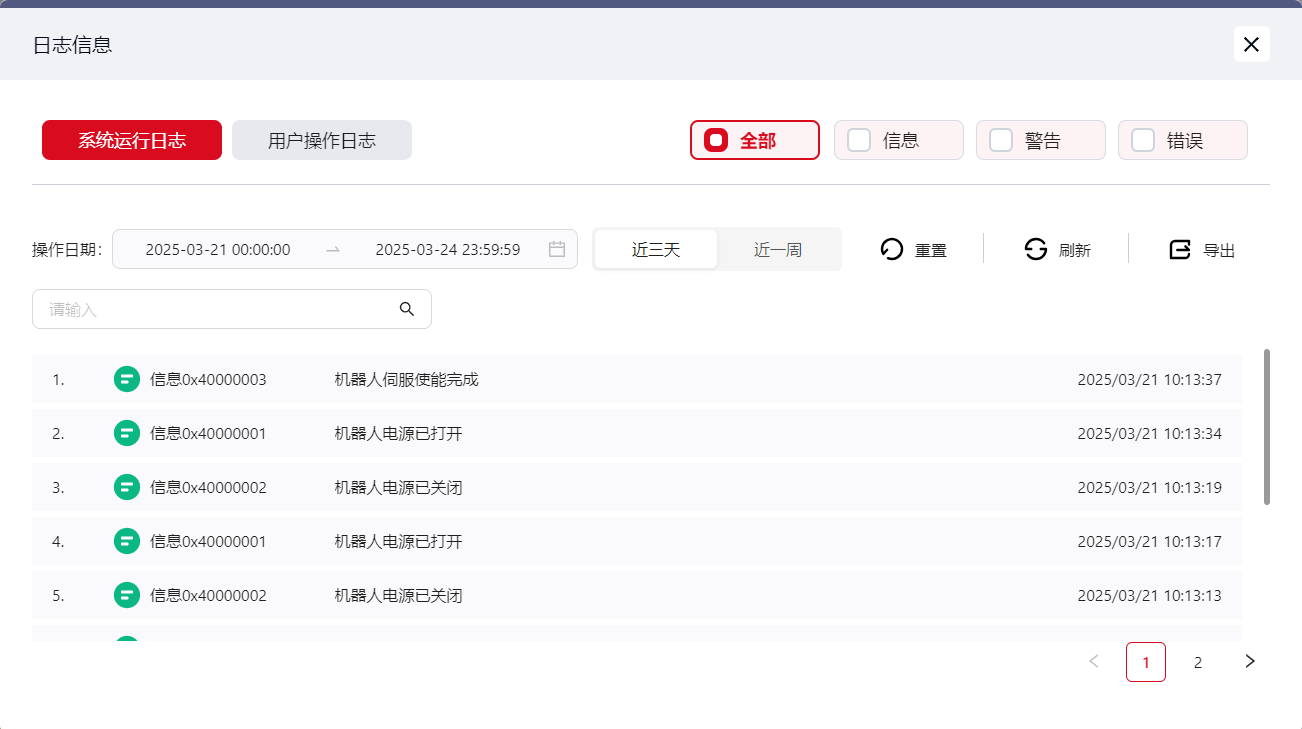
系统运行日志包括信息 警告 错误,可点击相应图标筛选范围。
用户可点击操作日期旁的时间框,筛选、查询具体某一时间点的日志;也可点击近三天或近一周筛选该范围内的日志。
用户可点击重置 刷新 导出对日志进行相应操作。
用户也可在请输入处直接输入关键字搜索相应日志。
用户操作日志
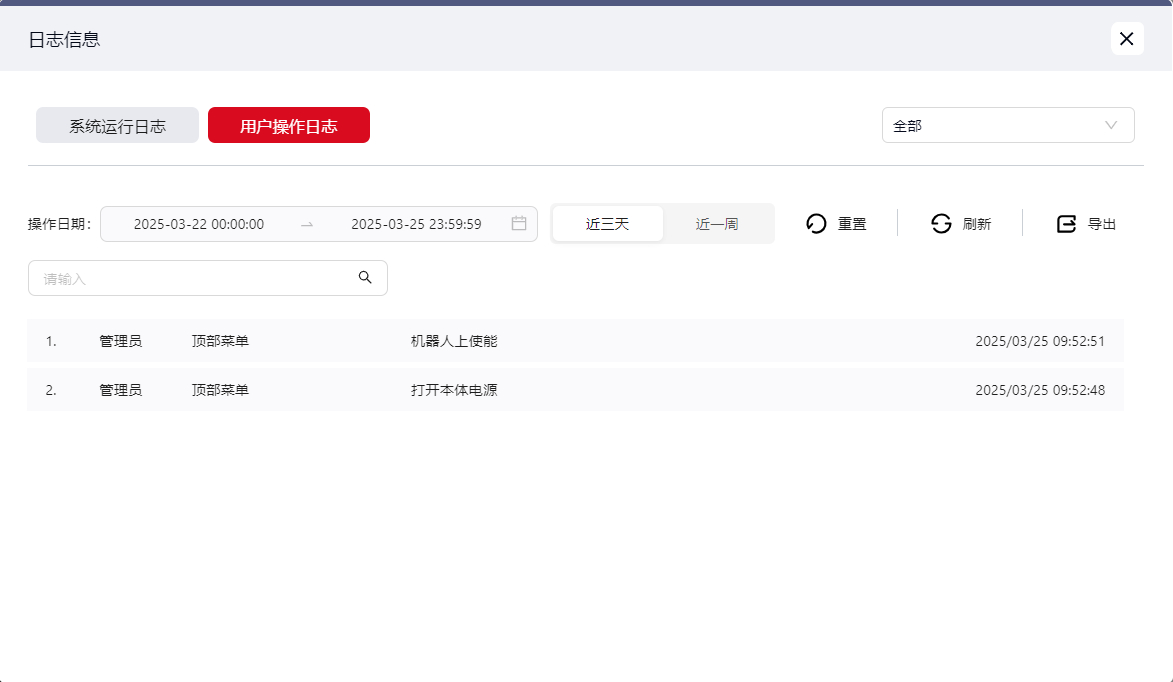
用户可在全部处的下拉框里筛选不同角色对应的操作日志。
用户可点击操作日期旁的时间框,筛选、查询具体某一时间点的日志;也可点击近三天或近一周筛选该范围内的日志。
用户可点击重置 刷新 导出对日志进行相应操作。
用户也可在请输入处直接输入关键字搜索相应日志。
集合工具包
点击该按钮,用户可进行如下操作:
换肤

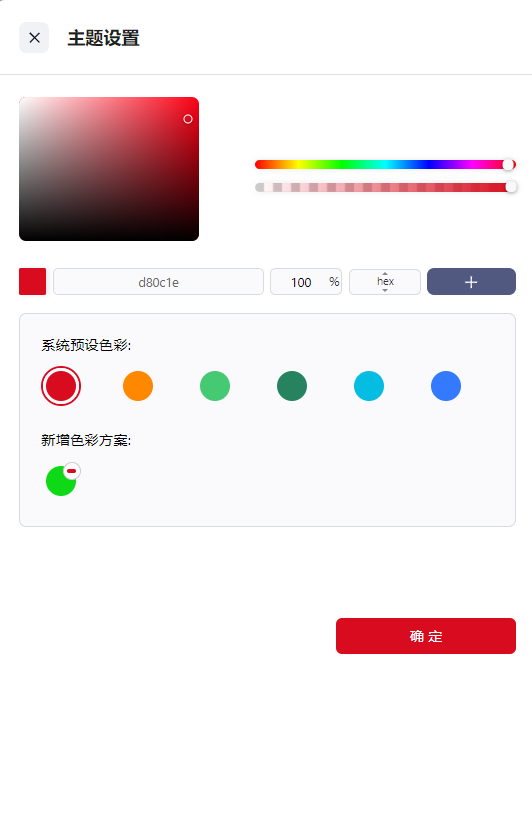
用户可在系统预设色彩处选择已有颜色为Coboπ系统设置主题色;
也可在色彩框处选择自己的颜色,然后点击+,选择好的颜色就会保存在新增色彩方案处;
选择好颜色后,点击确定以生效。
监控


用户可在此处查看机器人的实时信息,具体内容如图。
连接

用户可在此处查看机器人的详细信息,具体内容如图。
点击右下方的下载图标,可将Coboπ的运行日志下载至本地,方便发送给JAKA技术人员排查问题。
切换机器人
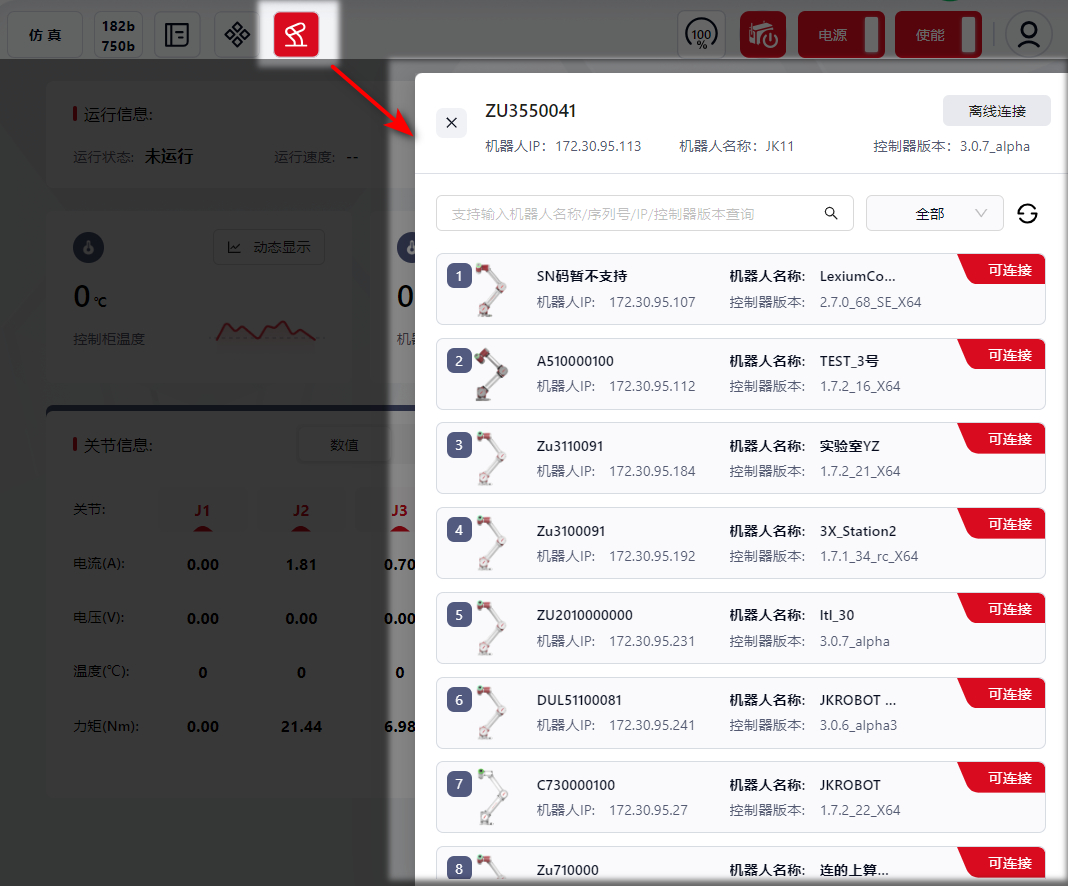
点击该图标,可在右侧跳出的页面中切换、连接其他机器人。
手/自动模式及三位置使能

手/自动模式切换
用户可点击该按钮切换机器人的手动、自动模式
自动模式
在该模式下,机器人可以完成自动化生产任务,但用户无法直接示教机器人、无法手动控制机器人、无法控制三位置使能。
手动模式
该模式为默认模式,处于该模式中时,用户可进行所有操作。
三位置使能
本功能只在手动模式下生效,且需要和示教器配合使用。
提示:
此处只是显示三位置使能的状态,不能切换,实际状态的触发需要在示教器上完成。
三位置使能按钮的状态能在此处显示,具体的状态说明如下:
- 三位置使能控制关闭:

- 三位置使能控制开启,但当前不可使用:

- 三位置使能开启后,图标显示及按钮状态如下图:
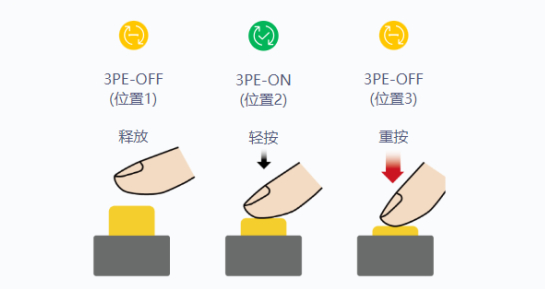
- 中间位置:机器人处于上电上使能状态,用户可以正常操作机器人;
- 松开或按到底:机器人立即停止运动。
机器人控制按钮

控制速度

点击该图标可控制机器人在程序中的运行速度,用户可在框内输入数值(范围为1-100),也可直接拖动滑动按钮来调节。
控制源切换
目前机器人有三个控制源:app软件控制、示教器控制、外部控制源(SDK与功能DI)。节卡机器人采用单点控制法,即同一时间只能被唯一一种控制源控制。

点击此按钮,可实现app软件与外部控制源之间的切换。
当机器人处于外部控制源状态中时,用户只能实现SDK和功能DI所能实现的操作,无法在app界面修改机器人的各类参数与使机器人运动。
特别注意:
- App具有优先抢夺权限,用户需要在app上点击按钮切换控制源后,机器人才会被外部控制源控制。处于外部控制源控制状态时,用户在app上点击切换按钮,控制源也会被换回app。
- 机器人的专用安全I/O不受控制源限制。
- 诊断功能在外部控制源控制状态下,可以实现开始诊断和停止诊断功能。
- 如果在程序运行中切换成了外部控制源,则机器人程序暂停、运动停止。
关闭或重启控制柜

用户可选择关闭或重启控制柜。
注意:
关闭控制柜后,整个Coboπ系统页面也会被关闭。
上/下电、上/下使能机器人

用户可点击此处图标来上电、上使能机器人。未上电、上使能时图标为灰色。
正确操作顺序为:先上电,再上使能。
点击上电按钮后,请先确认好弹窗中的机器人相关信息后,再点击 确认 ,上使能机器人。
若想下使能、下电机器人,再次点击此处图标即可。
正确操作顺序为:先下使能,再下电。
其他信息

除上图中的信息外,用户还可查看:
关于节卡:点击该图标会跳出写有JAKA官网地址的提示框,直接点击框内链接即可访问。
语言切换:点击该图标可以切换语言。
退出登录:点击该图标可以退出Coboπ系统。