


'%3e%3cline%20id='直线_13422'%20data-name='直线%2013422'%20x2='29.367'%20transform='translate(23668.262%20-12026.238)%20rotate(45)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-width='2'/%3e%3cline%20id='直线_13423'%20data-name='直线%2013423'%20x2='29.367'%20transform='translate(23689.027%20-12026.238)%20rotate(135)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e)

'%3e%3cpath%20id='路径_21753'%20data-name='路径%2021753'%20d='M25.248,22.5A8.248,8.248,0,1,0,17,14.248,8.248,8.248,0,0,0,25.248,22.5Z'%20transform='translate(-0.33%20-1.695)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='4'/%3e%3cpath%20id='路径_21754'%20data-name='路径%2021754'%20d='M6,41.453v1.261H43.837V41.453c0-4.709,0-7.064-.916-8.862a8.409,8.409,0,0,0-3.675-3.675C37.448,28,35.093,28,30.384,28H19.453c-4.709,0-7.064,0-8.862.916a8.408,8.408,0,0,0-3.675,3.675C6,34.39,6,36.744,6,41.453Z'%20transform='translate(0%201.209)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='4'/%3e%3c/g%3e%3c/svg%3e)



'%3e%3cpath%20id='路径_20744'%20data-name='路径%2020744'%20d='M5,19H22.665v9.762a.93.93,0,0,1-.93.93H5.93a.93.93,0,0,1-.93-.93Z'%20transform='translate(0%20-8.027)'%20fill='none'%20stroke='%23999'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20745'%20data-name='路径%2020745'%20d='M5,7.93A.93.93,0,0,1,5.93,7H21.735a.93.93,0,0,1,.93.93v4.649H5Z'%20transform='translate(0%20-1.605)'%20fill='none'%20stroke='%23999'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20746'%20data-name='路径%2020746'%20d='M16,4V7.719'%20transform='translate(-5.886)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20747'%20data-name='路径%2020747'%20d='M32,4V7.719'%20transform='translate(-14.449)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20748'%20data-name='路径%2020748'%20d='M28,34h2.789'%20transform='translate(-12.308%20-16.054)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20749'%20data-name='路径%2020749'%20d='M14,34h2.789'%20transform='translate(-4.816%20-16.054)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20750'%20data-name='路径%2020750'%20d='M28,26h2.789'%20transform='translate(-12.308%20-11.773)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20751'%20data-name='路径%2020751'%20d='M14,26h2.789'%20transform='translate(-4.816%20-11.773)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3c/g%3e%3c/svg%3e) 2026.04.15 Blog
2026.04.15 Blog





Selecting the right software and control interface for a programmable robotic arm starts with understanding how the system will be used on the production floor. We look first at task complexity, operator experience, and the level of process consistency required. For applications such as dispensing or gluing, stable motion paths and precise flow control are more important than highly abstract programming functions. A well-designed interface should allow operators to adjust parameters intuitively while maintaining repeatability. When deploying a 6 axis robot arm, we also consider how easily the software supports multi-angle movement and coordinated axis control without increasing setup time. From our experience at JAKA, matching control logic to real production behavior helps reduce commissioning effort and improves overall workflow stability.
Evaluating Software Usability and Programming Flexibility
Ease of use is a core factor when choosing programmable robotic arm software. We prioritize systems that support graphical programming, drag-and-drop logic, and manual guidance, as these features reduce reliance on specialized programming skills. This approach allows operators to focus on process optimization rather than code maintenance. At the same time, the software should remain flexible enough to support future changes in production layout or product design. A programmable robotic arm must adapt to different dispensing paths, speeds, and material behaviors without requiring complete reprogramming. For a 6 axis robot arm, intuitive visualization of joint movement and path planning helps avoid collisions and ensures consistent output, especially in compact workspaces.
Integration and Application-Specific Control Design
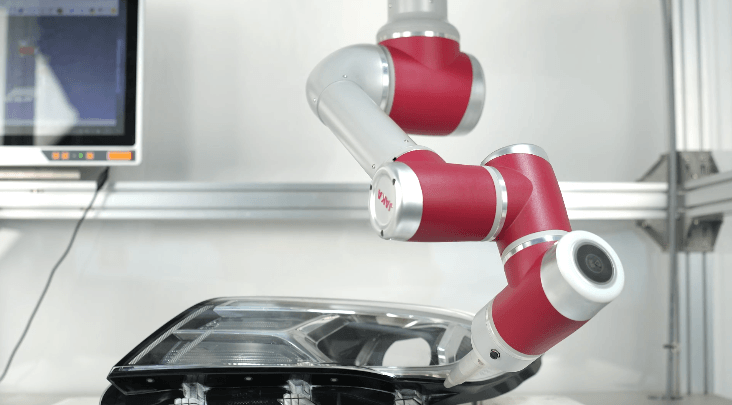
Control interfaces should align closely with the target application. In gluing processes, smooth motion control and accurate timing directly affect product appearance and material usage. Our JAKA Zu3 gluing solution focuses on convenient deployment and easy relocation within the working area, which places additional demands on control responsiveness and interface clarity. By replacing manual dispensing with mechanized operation, we enable more consistent flow control, reduced glue waste, and lower labor dependence. Within JAKA systems, the control interface supports fast adjustments to dispensing parameters, allowing operators to fine-tune results without interrupting production. This balance between precision and simplicity is essential for any programmable robotic arm used in continuous manufacturing environments.
Conclusion: Aligning Software Choices with Long-Term Production Goals
Choosing the right software and control interface for a programmable robotic arm requires a clear view of current tasks and future scalability. We recommend evaluating usability, motion control clarity, and application alignment rather than focusing solely on feature count. For operations involving a 6 axis robot arm, stable multi-directional control and intuitive programming play a central role in maintaining efficiency. By designing our solutions at JAKA around real production needs, including flexible gluing applications like the Zu3, we help manufacturers transition smoothly from manual processes to automated systems while maintaining control, consistency, and adaptability over time.
'%3e%3cpath%20id='路径_17618'%20data-name='路径%2017618'%20d='M10.031,8,6,11.455l4.031,4.031'%20fill='none'%20stroke='%23333'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3cpath%20id='路径_17619'%20data-name='路径%2017619'%20d='M6,14H19.24a7.486,7.486,0,1,1,0,14.971H9.454'%20transform='translate(0%20-2.545)'%20fill='none'%20stroke='%23333'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_17618'%20data-name='路径%2017618'%20d='M10.031,8,6,11.455l4.031,4.031'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3cpath%20id='路径_17619'%20data-name='路径%2017619'%20d='M6,14H19.24a7.486,7.486,0,1,1,0,14.971H9.454'%20transform='translate(0%20-2.545)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e) Return to List
Return to List







Germany: Breslauer Str. 10, 90766 Fuerth, Germany
Japan:1F, 1 - 6 - 14 Aoi, Higashi, Nagoya , Japan
Malaysia:5-G, Jalan Borealis 3, Bandar Cassia,14110 Simpang Ampat, Penang,Malaysia
China:18 Nangu Road, Minhang District, Shanghai, China
'%3e%3ccircle%20id='椭圆_7060'%20data-name='椭圆%207060'%20cx='50'%20cy='50'%20r='50'%20transform='translate(134%209657)'%20fill='%23d80c1e'/%3e%3cpath%20id='路径_21623'%20data-name='路径%2021623'%20d='M947.11,3321.132s-4.227,8.162,4.833,24.7c.065.116.129.23.195.346s.124.234.187.354c9.06,16.532,18.214,17.362,18.214,17.362a4.8,4.8,0,0,0,2.246-.177,17.018,17.018,0,0,0,4.229-2.687c1.79-1.639.384-5.317-.541-7.009-1.876-3.422-4.162-4.65-5.447-4.225-.577.188-3.1,1.7-3.1,1.7a2.855,2.855,0,0,1-1.86.213s-3.357-.941-7.792-8.892c-4.309-8.01-3.3-11.347-3.3-11.347a2.854,2.854,0,0,1,1.182-1.455s3.069-1.675,3.1-1.7c1.229-.863.555-4.1-.63-6.864a6.434,6.434,0,0,0-3.163-3.754c-2.256-1.158-7.477.768-8.349,3.436Z'%20transform='translate(-778%206368.353)'%20fill='%23fff'/%3e%3c/g%3e%3c/svg%3e)
Germany: Breslauer Str. 10, 90766 Fuerth, Germany
Japan:1F, 1 - 6 - 14 Aoi, Higashi, Nagoya , Japan
Malaysia:5-G, Jalan Borealis 3, Bandar Cassia,14110 Simpang Ampat, Penang,Malaysia
China:18 Nangu Road, Minhang District, Shanghai, China





'%3e%3cpath%20id='路径_21594'%20data-name='路径%2021594'%20d='M-993.748,3818.961h0a8.127,8.127,0,1,0-16.25,0'%20transform='translate(-0.958%200)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_21595'%20data-name='路径%2021595'%20d='M-987.315,3834.607h0a6.421,6.421,0,0,1-6.421,6.421h-.153'%20transform='translate(-7.391%20-9.576)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48952'%20data-name='矩形%2048952'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-996.148%203818.961)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48953'%20data-name='矩形%2048953'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-1012.397%203818.961)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48954'%20data-name='矩形%2048954'%20width='3.07'%20height='2.291'%20rx='1.146'%20transform='translate(-1004.35%203830.306)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21594'%20data-name='路径%2021594'%20d='M-993.748,3818.961h0a8.127,8.127,0,1,0-16.25,0'%20transform='translate(-0.958%200)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_21595'%20data-name='路径%2021595'%20d='M-987.315,3834.607h0a6.421,6.421,0,0,1-6.421,6.421h-.153'%20transform='translate(-7.391%20-9.576)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48952'%20data-name='矩形%2048952'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-996.148%203818.961)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48953'%20data-name='矩形%2048953'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-1012.397%203818.961)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48954'%20data-name='矩形%2048954'%20width='3.07'%20height='2.291'%20rx='1.146'%20transform='translate(-1004.35%203830.306)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)






'%3e%3cpath%20id='路径_21593'%20data-name='路径%2021593'%20d='M-971.813,3958.813l5.517-5.517,5.517,5.517'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13976'%20data-name='直线%2013976'%20y2='15.981'%20transform='translate(-966.296%203953.296)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13977'%20data-name='直线%2013977'%20x2='8.519'%20transform='translate(-970.556%203952.778)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21593'%20data-name='路径%2021593'%20d='M-971.813,3958.813l5.517-5.517,5.517,5.517'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13976'%20data-name='直线%2013976'%20y2='15.981'%20transform='translate(-966.296%203953.296)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13977'%20data-name='直线%2013977'%20x2='8.519'%20transform='translate(-970.556%203952.778)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)