




'%3e%3cline%20id='直线_13422'%20data-name='直线%2013422'%20x2='29.367'%20transform='translate(23668.262%20-12026.238)%20rotate(45)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-width='2'/%3e%3cline%20id='直线_13423'%20data-name='直线%2013423'%20x2='29.367'%20transform='translate(23689.027%20-12026.238)%20rotate(135)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21753'%20data-name='路径%2021753'%20d='M25.248,22.5A8.248,8.248,0,1,0,17,14.248,8.248,8.248,0,0,0,25.248,22.5Z'%20transform='translate(-0.33%20-1.695)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='4'/%3e%3cpath%20id='路径_21754'%20data-name='路径%2021754'%20d='M6,41.453v1.261H43.837V41.453c0-4.709,0-7.064-.916-8.862a8.409,8.409,0,0,0-3.675-3.675C37.448,28,35.093,28,30.384,28H19.453c-4.709,0-7.064,0-8.862.916a8.408,8.408,0,0,0-3.675,3.675C6,34.39,6,36.744,6,41.453Z'%20transform='translate(0%201.209)'%20fill='none'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='4'/%3e%3c/g%3e%3c/svg%3e)



'%3e%3cpath%20id='路径_20744'%20data-name='路径%2020744'%20d='M5,19H22.665v9.762a.93.93,0,0,1-.93.93H5.93a.93.93,0,0,1-.93-.93Z'%20transform='translate(0%20-8.027)'%20fill='none'%20stroke='%23999'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20745'%20data-name='路径%2020745'%20d='M5,7.93A.93.93,0,0,1,5.93,7H21.735a.93.93,0,0,1,.93.93v4.649H5Z'%20transform='translate(0%20-1.605)'%20fill='none'%20stroke='%23999'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20746'%20data-name='路径%2020746'%20d='M16,4V7.719'%20transform='translate(-5.886)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20747'%20data-name='路径%2020747'%20d='M32,4V7.719'%20transform='translate(-14.449)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20748'%20data-name='路径%2020748'%20d='M28,34h2.789'%20transform='translate(-12.308%20-16.054)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20749'%20data-name='路径%2020749'%20d='M14,34h2.789'%20transform='translate(-4.816%20-16.054)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20750'%20data-name='路径%2020750'%20d='M28,26h2.789'%20transform='translate(-12.308%20-11.773)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3cpath%20id='路径_20751'%20data-name='路径%2020751'%20d='M14,26h2.789'%20transform='translate(-4.816%20-11.773)'%20fill='none'%20stroke='%23999'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1.5'/%3e%3c/g%3e%3c/svg%3e) 2025.11.23 公司新闻
2025.11.23 公司新闻'%3e%3cg%20id='组_20324'%20data-name='组%2020324'%20transform='translate(200.299%20-849.1)'%3e%3cpath%20id='路径_546'%20data-name='路径%20546'%20d='M1020.1,1155.5h.1c-.6-2.5-3.2-4.4-6.3-4.4-3.6,0-6.4,2.4-6.4,5.5a5.172,5.172,0,0,0,2.5,4.3l-.6,1.9,2.2-1.1h0a8.6,8.6,0,0,0,2.4.4h.6a4.012,4.012,0,0,1-.3-1.5c-.1-2.8,2.6-5.1,5.8-5.1Zm-4.1-1.3a.817.817,0,0,1,.9.8.73.73,0,0,1-.6.7h-.3a.817.817,0,0,1-.9-.8.808.808,0,0,1,.9-.7Zm-3.8,1.4h-.3a.817.817,0,0,1-.9-.8.882.882,0,0,1,.9-.8.817.817,0,0,1,.9.8c-.1.5-.3.7-.6.8Z'%20fill='%23666'/%3e%3cpath%20id='路径_547'%20data-name='路径%20547'%20d='M1025.5,1160.6c0-2.5-2.4-4.6-5.4-4.6s-5.4,2.1-5.4,4.6,2.4,4.6,5.4,4.6a5.821,5.821,0,0,0,1.9-.3l1.7.9-.5-1.5a4.267,4.267,0,0,0,2.3-3.7Zm-6.8-.9h-.3a.554.554,0,1,1,.3,0Zm3.5,0h-.3a.607.607,0,1,1,.7-.6.548.548,0,0,1-.4.6Z'%20fill='%23666'/%3e%3c/g%3e%3ccircle%20id='椭圆_6748'%20data-name='椭圆%206748'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1201.1%20293.5)'%20fill='none'%20stroke='%23e9e9e9'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20id='组_20324'%20data-name='组%2020324'%20transform='translate(200.299%20-849.1)'%3e%3cpath%20id='路径_546'%20data-name='路径%20546'%20d='M1020.1,1155.5h.1c-.6-2.5-3.2-4.4-6.3-4.4-3.6,0-6.4,2.4-6.4,5.5a5.172,5.172,0,0,0,2.5,4.3l-.6,1.9,2.2-1.1h0a8.6,8.6,0,0,0,2.4.4h.6a4.012,4.012,0,0,1-.3-1.5c-.1-2.8,2.6-5.1,5.8-5.1Zm-4.1-1.3a.817.817,0,0,1,.9.8.73.73,0,0,1-.6.7h-.3a.817.817,0,0,1-.9-.8.808.808,0,0,1,.9-.7Zm-3.8,1.4h-.3a.817.817,0,0,1-.9-.8.882.882,0,0,1,.9-.8.817.817,0,0,1,.9.8c-.1.5-.3.7-.6.8Z'%20fill='%23d80c1e'/%3e%3cpath%20id='路径_547'%20data-name='路径%20547'%20d='M1025.5,1160.6c0-2.5-2.4-4.6-5.4-4.6s-5.4,2.1-5.4,4.6,2.4,4.6,5.4,4.6a5.821,5.821,0,0,0,1.9-.3l1.7.9-.5-1.5a4.267,4.267,0,0,0,2.3-3.7Zm-6.8-.9h-.3a.554.554,0,1,1,.3,0Zm3.5,0h-.3a.607.607,0,1,1,.7-.6.548.548,0,0,1-.4.6Z'%20fill='%23d80c1e'/%3e%3c/g%3e%3ccircle%20id='椭圆_6748'%20data-name='椭圆%206748'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1201.1%20293.5)'%20fill='none'%20stroke='%23d80c1e'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20id='组_20325'%20data-name='组%2020325'%20transform='translate(200.299%20-848.615)'%3e%3cg%20id='组_1116'%20data-name='组%201116'%3e%3cpath%20id='路径_548'%20data-name='路径%20548'%20d='M1065.5,1158.2c-.2-.1-.4-.1-.3-.4a1.693,1.693,0,0,0,0-1.7c-.5-.8-2-.7-3.7,0,0,0-.5.2-.4-.2a1.944,1.944,0,0,0-.2-2c-.9-.9-3.4,0-5.5,2.1-1.6,1.6-2.5,3.3-2.5,4.7,0,2.8,3.6,4.5,7,4.5,4.6,0,7.6-2.7,7.6-4.8,0-1.2-1.1-1.9-2-2.2Zm-5.6,6.1c-2.8.3-5.2-1-5.3-2.8-.2-1.8,1.9-3.5,4.7-3.8s5.2,1,5.4,2.8S1062.7,1164,1059.9,1164.3Zm8.6-11.2a4.506,4.506,0,0,0-4.2-1.4c-.3.1-.6.4-.5.7s.4.6.7.5h.1a3.042,3.042,0,0,1,3.7,2.4,2.918,2.918,0,0,1-.1,1.6.632.632,0,1,0,1.2.4,4.408,4.408,0,0,0-.9-4.2Z'%20fill='%23666'/%3e%3cpath%20id='路径_549'%20data-name='路径%20549'%20d='M1066.8,1154.7a2.293,2.293,0,0,0-2.1-.7.57.57,0,1,0,.3,1.1,1.115,1.115,0,0,1,1.3.8v.5a.538.538,0,0,0,1,.4h0A2.207,2.207,0,0,0,1066.8,1154.7Zm-6.6,4.4a3.092,3.092,0,0,0-3.4,1.5,2.02,2.02,0,0,0,1.3,2.9,3.052,3.052,0,0,0,3.6-1.5A2.057,2.057,0,0,0,1060.2,1159.1Zm-1,3a1.094,1.094,0,0,1-1.3.4.819.819,0,0,1-.4-1,.1.1,0,0,1,.1-.1,1,1,0,0,1,1.2-.4.819.819,0,0,1,.4,1S1059.2,1162.1,1059.2,1162.1Zm.9-1.1c-.1.2-.3.2-.5.2-.1-.1-.2-.2-.1-.4v-.1c.1-.2.3-.2.5-.2a.75.75,0,0,1,.1.5Z'%20fill='%23666'/%3e%3c/g%3e%3c/g%3e%3ccircle%20id='椭圆_6749'%20data-name='椭圆%206749'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1245.799%20293.5)'%20fill='rgba(0,0,0,0)'%20stroke='%23e9e9e9'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20id='组_20325'%20data-name='组%2020325'%20transform='translate(200.299%20-848.615)'%3e%3cg%20id='组_1116'%20data-name='组%201116'%3e%3cpath%20id='路径_548'%20data-name='路径%20548'%20d='M1065.5,1158.2c-.2-.1-.4-.1-.3-.4a1.693,1.693,0,0,0,0-1.7c-.5-.8-2-.7-3.7,0,0,0-.5.2-.4-.2a1.944,1.944,0,0,0-.2-2c-.9-.9-3.4,0-5.5,2.1-1.6,1.6-2.5,3.3-2.5,4.7,0,2.8,3.6,4.5,7,4.5,4.6,0,7.6-2.7,7.6-4.8,0-1.2-1.1-1.9-2-2.2Zm-5.6,6.1c-2.8.3-5.2-1-5.3-2.8-.2-1.8,1.9-3.5,4.7-3.8s5.2,1,5.4,2.8S1062.7,1164,1059.9,1164.3Zm8.6-11.2a4.506,4.506,0,0,0-4.2-1.4c-.3.1-.6.4-.5.7s.4.6.7.5h.1a3.042,3.042,0,0,1,3.7,2.4,2.918,2.918,0,0,1-.1,1.6.632.632,0,1,0,1.2.4,4.408,4.408,0,0,0-.9-4.2Z'%20fill='%23d80c1e'/%3e%3cpath%20id='路径_549'%20data-name='路径%20549'%20d='M1066.8,1154.7a2.293,2.293,0,0,0-2.1-.7.57.57,0,1,0,.3,1.1,1.115,1.115,0,0,1,1.3.8v.5a.538.538,0,0,0,1,.4h0A2.207,2.207,0,0,0,1066.8,1154.7Zm-6.6,4.4a3.092,3.092,0,0,0-3.4,1.5,2.02,2.02,0,0,0,1.3,2.9,3.052,3.052,0,0,0,3.6-1.5A2.057,2.057,0,0,0,1060.2,1159.1Zm-1,3a1.094,1.094,0,0,1-1.3.4.819.819,0,0,1-.4-1,.1.1,0,0,1,.1-.1,1,1,0,0,1,1.2-.4.819.819,0,0,1,.4,1S1059.2,1162.1,1059.2,1162.1Zm.9-1.1c-.1.2-.3.2-.5.2-.1-.1-.2-.2-.1-.4v-.1c.1-.2.3-.2.5-.2a.75.75,0,0,1,.1.5Z'%20fill='%23d80c1e'/%3e%3c/g%3e%3c/g%3e%3ccircle%20id='椭圆_6749'%20data-name='椭圆%206749'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1245.799%20293.5)'%20fill='none'%20stroke='%23d80c1e'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20id='椭圆_6750'%20data-name='椭圆%206750'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1290.6%20293.5)'%20fill='none'%20stroke='%23e9e9e9'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3cpath%20id='路径_20741'%20data-name='路径%2020741'%20d='M186.438,120.769c-.28-.9-.6-1.655-1.1-2.892.077-3.249-1.274-5.877-4.384-5.877-3.146,0-4.467,2.68-4.383,5.877-.5,1.239-.817,1.989-1.1,2.892-.595,1.916-.4,2.708-.255,2.726.315.038,1.226-1.442,1.226-1.442a3.82,3.82,0,0,0,1.4,2.782c-.462.142-1.5.523-1.253.941.2.338,3.433.215,4.365.11.933.1,4.166.227,4.365-.11.247-.416-.793-.8-1.253-.941a3.826,3.826,0,0,0,1.4-2.782s.912,1.48,1.226,1.442C186.841,123.475,187.033,122.683,186.438,120.769Z'%20transform='translate(1125.342%20191)'%20fill='%23666'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20id='椭圆_6750'%20data-name='椭圆%206750'%20cx='15.7'%20cy='15.7'%20r='15.7'%20transform='translate(1290.6%20293.5)'%20fill='none'%20stroke='%23d80c1e'%20stroke-miterlimit='10'%20stroke-width='1'/%3e%3cpath%20id='路径_20741'%20data-name='路径%2020741'%20d='M186.438,120.769c-.28-.9-.6-1.655-1.1-2.892.077-3.249-1.274-5.877-4.384-5.877-3.146,0-4.467,2.68-4.383,5.877-.5,1.239-.817,1.989-1.1,2.892-.595,1.916-.4,2.708-.255,2.726.315.038,1.226-1.442,1.226-1.442a3.82,3.82,0,0,0,1.4,2.782c-.462.142-1.5.523-1.253.941.2.338,3.433.215,4.365.11.933.1,4.166.227,4.365-.11.247-.416-.793-.8-1.253-.941a3.826,3.826,0,0,0,1.4-2.782s.912,1.48,1.226,1.442C186.841,123.475,187.033,122.683,186.438,120.769Z'%20transform='translate(1125.342%20191)'%20fill='%23d80c1e'/%3e%3c/g%3e%3c/svg%3e)
在商业零售场景中,商超、药房等场所空间局促,货架布局固定,传统配送设备难以灵活作业,如何在不改造场地的前提下实现高效配送,是行业的共性需求。
JAKALumi针对配送、巡检、分拣等轻量数采和模型训练场景研发,以宽度仅510mm的类人机身实现“轻量化”突破,无需改造货架布局即可灵活穿行,实现"零改造部署"。在商超场景中,当顾客通过APP下单后,机器人仅需3秒响应定位,在20-30米的典型商超通道内,40s内完成从货架精准抓取零食到取餐口的全流程。

全栈智能系统:从感知到执行的毫秒级闭环
整合6轴机械臂+360°激光SLAM底盘、升降模块等多种传感器,构建"环境感知-路径规划-精准抓取"智能链路。高精度视觉算法,确保商品识别准确度100%,结合高精度运动控制,抓取执行精度误差稳定在±3mm以内。
极简部署方案:5步完成全流程配置
高度集成,开发者仅需完成"开箱-配置-训练-测试-部署"5步操作,即可快速搭建定制化场景应用,让机器人开发从"专家级"门槛降至"本科生可操作",显著降低开发成本。
开放生态架构:多平台兼容
JAKALumi平台提供高效完整的训练工具链,开放API接口,支持MuJoCo、NVIDIAIsaacSim等主流仿真平台。
多模态交互:自然语言指令直达任务执行
支持搭载大模型驱动的语音-视觉融合系统,能够实现"我要青瓜味薯片"等自然语言指令的毫秒级响应,支持多语言混合指令识别。
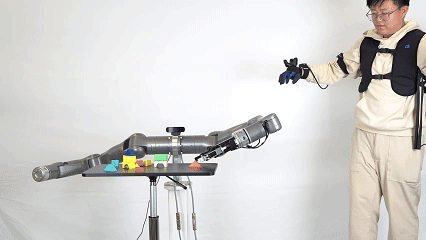
在高校实验室中,学生通过语音指令"把蓝色积木放到红色区域",JAKALumi即刻完成物品识别、路径规划、精准抓取等复合操作。JAKALumi丰富的SDK接口,可自由兼容JAKA+生态圈灵巧手、电动夹爪等末端执行器,支持变换工具搭建新场景。
目前,节卡机器人已在GitHub“节卡具身智能社区”开放demo案例等,诚邀各位全球开发者共同完善商业零售、科研教育、生物化学等多领域场景训练库,推动具身智能从“场景特化”向“全域通用”进化。
构建一个智能化工厂的雏形
在现实的工厂场景中,订单需求频繁变化,传统人工操作效率低、出错率高,且产线无法快速响应柔性生产要求。传统机器人的智能化改造至少面临以下3个问题:
1、数据依赖性强:传统机器人需海量数据训练,部署周期长达3-6个月
2、协同效率低:多设备间通信延迟>10ms,导致节拍不匹配,出现产能损失
3、示教成本高:需专业工程师手动示教,单次示教耗时2-4小时/工位,人力成本投入高;小批量多品种订单下,传统机器人换产周期长达8-12小时,无法适配高频换产需求。
基于JAKAEVO工业具身智能平台,我们用自己的具身智能家族产品搭建了一套智能机器人分拣系统,实现了多型号关节组件的精准分拣、加工与转运的全流程无人化作业,展示了“机器人自主组装机器人”的真实场景,分拣精度高达100%,加工效率提升20%。

JAKAKargo轮式人形机器人通过多模态感知系统,精准识别多种型号关节,并依据订单需求完成分拣任务。分拣结束后,通过底盘通信机制通知JAKAS³移动作业机器人进行后续加工。其后,另一台JAKAKargo轮式人形机器人识别托盘内关节的状态与订单信息,并执行精准转运。
低数据依赖,部署周期大幅缩短
JAKAEVO工业具身智能平台,提供“数据构建-模型训练-自动化部署”完整工具链,其专利算法,打破传统机器人在众多简单场景内对海量训练数据的依赖性,仅用50组增补数据就把抓取成功率拉到80%以上。
高协同效率,减少产能损失
JAKAKargo轮式人形机器人以1ms高速通讯频率响应,配合JAKAEVO平台“感知-决策-执行”闭环及底盘通信机制,实现多设备间低延迟联动。通讯延迟远低于传统设备的10ms,有效解决节拍不匹配问题,避免产能损失。
高场景通用性,质效提升
低数据依赖,可快速适配不同工件与产线,卓越的多任务协同能力,能够灵活适配复杂生产流程,高效串联上下游工序,减少不必要成本。
目前,JAKAKargo轮式人形机器人已在某500强企业工厂展开灵活作业,并在智能分拣、搬运、上下料、检测等移动作业场景表现出优异的应用潜力。
高精尖选手精密装配就看TA
在工业现场,大量带线缆插头的接插工序对定位和装配精度要求高,需要实现对插头的稳定抓取以及亚毫米级的装配精度。实际生产中,插头往往存在种类多样、初始位姿不确定等问题,传统刚性自动化方案难以兼顾效率与稳定性。JAKAK1双臂机器人,在数据训练后可实现顺滑的柔性插拔,并体现出显著优势:

多模态感知精准定位
搭载深度相机与六维力控模块,基于视觉及深度信息,机器人可区分不同类型端子,并对其实际初始位姿进行精确识别与引导,保障稳定可靠的抓取,解决传统设备识别单一、定位偏差问题。
力控自适应装配
内嵌六维力传感器,具备1kHz力控响应频率,0.5N力控跟踪精度,以及优越的抗干扰能力,可实时反馈插拔力数据,机器人通过自主搜孔与动态微小轨迹修正,有效补偿视觉误差及机械臂本体误差,实现稳定装配。
亚毫米级精度保障
除却视觉与力控的深度融合,JAKAK1双臂机器人的高刚性结构所带来的抗形变和稳定作业能力,综合实现亚毫米级别装配精度及95%以上的作业成功率。这一优势确保插头接插工序在长时间连续运行下依然稳定可靠,为复杂插接工序的自动化升级提供有力支撑。

在科研院所,JAKAK1的精细操作能力同样亮眼——在遥操作实验中,它能以零抖动、高响应的表现完成红酒杯对碰、积木搭建等任务,成为科研人员开展精密实验的得力助手。
从商业零售的“流量承接”到工业制造的“效率革命”,再到精密制造的“精细操作”,节卡机器人正以开放生态与核心技术,推动具身智能从“场景特化”向“全域通用”进化,为智能制造与科研创新注入持续动力。
'%3e%3cpath%20id='路径_17618'%20data-name='路径%2017618'%20d='M10.031,8,6,11.455l4.031,4.031'%20fill='none'%20stroke='%23333'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3cpath%20id='路径_17619'%20data-name='路径%2017619'%20d='M6,14H19.24a7.486,7.486,0,1,1,0,14.971H9.454'%20transform='translate(0%20-2.545)'%20fill='none'%20stroke='%23333'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_17618'%20data-name='路径%2017618'%20d='M10.031,8,6,11.455l4.031,4.031'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3cpath%20id='路径_17619'%20data-name='路径%2017619'%20d='M6,14H19.24a7.486,7.486,0,1,1,0,14.971H9.454'%20transform='translate(0%20-2.545)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e) 返回列表
返回列表












江苏:江苏省常州市武宜南路377号10号楼
广东:深圳市宝安区泰华梧桐工业园7栋501
日本:名古屋市東区葵1-6-14 1F
马来西亚 :5-G, Jalan Borealis 3, Bandar Cassia,14110 Simpang Ampat, Penang,Malaysia
德国: Breslauer Str. 10, 90766 Fuerth, Germany
美国: 48 Wall Street, Suite 1100, New York , NY 10005
'%3e%3ccircle%20id='椭圆_7060'%20data-name='椭圆%207060'%20cx='50'%20cy='50'%20r='50'%20transform='translate(134%209657)'%20fill='%23d80c1e'/%3e%3cpath%20id='路径_21623'%20data-name='路径%2021623'%20d='M947.11,3321.132s-4.227,8.162,4.833,24.7c.065.116.129.23.195.346s.124.234.187.354c9.06,16.532,18.214,17.362,18.214,17.362a4.8,4.8,0,0,0,2.246-.177,17.018,17.018,0,0,0,4.229-2.687c1.79-1.639.384-5.317-.541-7.009-1.876-3.422-4.162-4.65-5.447-4.225-.577.188-3.1,1.7-3.1,1.7a2.855,2.855,0,0,1-1.86.213s-3.357-.941-7.792-8.892c-4.309-8.01-3.3-11.347-3.3-11.347a2.854,2.854,0,0,1,1.182-1.455s3.069-1.675,3.1-1.7c1.229-.863.555-4.1-.63-6.864a6.434,6.434,0,0,0-3.163-3.754c-2.256-1.158-7.477.768-8.349,3.436Z'%20transform='translate(-778%206368.353)'%20fill='%23fff'/%3e%3c/g%3e%3c/svg%3e)
江苏:江苏省常州市武宜南路377号10号楼
广东:深圳市宝安区泰华梧桐工业园7栋501
日本:名古屋市東区葵1-6-14 1F
马来西亚 :5-G, Jalan Borealis 3, Bandar Cassia,14110 Simpang Ampat, Penang,Malaysia
德国: Breslauer Str. 10, 90766 Fuerth, Germany
美国: 48 Wall Street, Suite 1100, New York , NY 10005






'%3e%3cpath%20id='路径_21594'%20data-name='路径%2021594'%20d='M-993.748,3818.961h0a8.127,8.127,0,1,0-16.25,0'%20transform='translate(-0.958%200)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_21595'%20data-name='路径%2021595'%20d='M-987.315,3834.607h0a6.421,6.421,0,0,1-6.421,6.421h-.153'%20transform='translate(-7.391%20-9.576)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48952'%20data-name='矩形%2048952'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-996.148%203818.961)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48953'%20data-name='矩形%2048953'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-1012.397%203818.961)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48954'%20data-name='矩形%2048954'%20width='3.07'%20height='2.291'%20rx='1.146'%20transform='translate(-1004.35%203830.306)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21594'%20data-name='路径%2021594'%20d='M-993.748,3818.961h0a8.127,8.127,0,1,0-16.25,0'%20transform='translate(-0.958%200)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_21595'%20data-name='路径%2021595'%20d='M-987.315,3834.607h0a6.421,6.421,0,0,1-6.421,6.421h-.153'%20transform='translate(-7.391%20-9.576)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48952'%20data-name='矩形%2048952'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-996.148%203818.961)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48953'%20data-name='矩形%2048953'%20width='2.883'%20height='6.026'%20rx='1.442'%20transform='translate(-1012.397%203818.961)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_48954'%20data-name='矩形%2048954'%20width='3.07'%20height='2.291'%20rx='1.146'%20transform='translate(-1004.35%203830.306)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20id='组_22577'%20data-name='组%2022577'%3e%3cline%20id='直线_14266'%20data-name='直线%2014266'%20x2='4.766'%20transform='translate(4887.493%207074.178)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14267'%20data-name='直线%2014267'%20y2='4.766'%20transform='translate(4889.876%207071.795)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3cpath%20id='路径_22025'%20data-name='路径%2022025'%20d='M4892.259,7068.056v-12.921h-21.426v21.426h13.056'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cg%20id='组_22578'%20data-name='组%2022578'%3e%3cline%20id='直线_14268'%20data-name='直线%2014268'%20x2='12.408'%20transform='translate(4873.852%207072.24)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22026'%20data-name='路径%2022026'%20d='M4875.556,7072.24h0a2.085,2.085,0,0,1,1.791-2.287h5.418a2.085,2.085,0,0,1,1.791,2.287h0'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14269'%20data-name='直线%2014269'%20y2='1.972'%20transform='translate(4878.585%207067.981)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14270'%20data-name='直线%2014270'%20y2='2.611'%20transform='translate(4881.26%207067.342)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_49985'%20data-name='矩形%2049985'%20width='3.046'%20height='6.556'%20rx='1.523'%20transform='translate(4875.126%207064.225)%20rotate(-45)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22027'%20data-name='路径%2022027'%20d='M4876.238,7063.048l2.944-2.944a1.527,1.527,0,0,1,2.153,0h0a1.528,1.528,0,0,1,0,2.154l-1.825,1.824'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3ccircle%20id='椭圆_7162'%20data-name='椭圆%207162'%20cx='1.523'%20cy='1.523'%20r='1.523'%20transform='translate(4875.693%207062.667)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22028'%20data-name='路径%2022028'%20d='M4881.779,7060.134h1.925V7062h-1.925'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14271'%20data-name='直线%2014271'%20x2='1.111'%20transform='translate(4883.704%207061.067)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22029'%20data-name='路径%2022029'%20d='M4887.87,7060.238l-1.291-.745-1.291.745v1.491l1.291.745,1.291-.745'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20id='组_22577'%20data-name='组%2022577'%3e%3cline%20id='直线_14266'%20data-name='直线%2014266'%20x2='4.766'%20transform='translate(4887.493%207074.178)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14267'%20data-name='直线%2014267'%20y2='4.766'%20transform='translate(4889.876%207071.795)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3cpath%20id='路径_22025'%20data-name='路径%2022025'%20d='M4892.259,7068.056v-12.921h-21.426v21.426h13.056'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cg%20id='组_22578'%20data-name='组%2022578'%3e%3cline%20id='直线_14268'%20data-name='直线%2014268'%20x2='12.408'%20transform='translate(4873.852%207072.24)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22026'%20data-name='路径%2022026'%20d='M4875.556,7072.24h0a2.085,2.085,0,0,1,1.791-2.287h5.418a2.085,2.085,0,0,1,1.791,2.287h0'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14269'%20data-name='直线%2014269'%20y2='1.972'%20transform='translate(4878.585%207067.981)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14270'%20data-name='直线%2014270'%20y2='2.611'%20transform='translate(4881.26%207067.342)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3crect%20id='矩形_49985'%20data-name='矩形%2049985'%20width='3.046'%20height='6.556'%20rx='1.523'%20transform='translate(4875.126%207064.225)%20rotate(-45)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22027'%20data-name='路径%2022027'%20d='M4876.238,7063.048l2.944-2.944a1.527,1.527,0,0,1,2.153,0h0a1.528,1.528,0,0,1,0,2.154l-1.825,1.824'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3ccircle%20id='椭圆_7162'%20data-name='椭圆%207162'%20cx='1.523'%20cy='1.523'%20r='1.523'%20transform='translate(4875.693%207062.667)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22028'%20data-name='路径%2022028'%20d='M4881.779,7060.134h1.925V7062h-1.925'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_14271'%20data-name='直线%2014271'%20x2='1.111'%20transform='translate(4883.704%207061.067)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cpath%20id='路径_22029'%20data-name='路径%2022029'%20d='M4887.87,7060.238l-1.291-.745-1.291.745v1.491l1.291.745,1.291-.745'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21593'%20data-name='路径%2021593'%20d='M-971.813,3958.813l5.517-5.517,5.517,5.517'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13976'%20data-name='直线%2013976'%20y2='15.981'%20transform='translate(-966.296%203953.296)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13977'%20data-name='直线%2013977'%20x2='8.519'%20transform='translate(-970.556%203952.778)'%20fill='none'%20stroke='%23d80c1e'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20id='路径_21593'%20data-name='路径%2021593'%20d='M-971.813,3958.813l5.517-5.517,5.517,5.517'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13976'%20data-name='直线%2013976'%20y2='15.981'%20transform='translate(-966.296%203953.296)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3cline%20id='直线_13977'%20data-name='直线%2013977'%20x2='8.519'%20transform='translate(-970.556%203952.778)'%20fill='none'%20stroke='%23fff'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='1'/%3e%3c/g%3e%3c/svg%3e)